
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 卷积神经网络(CNN)在合成孔径雷达(SAR)图像目标分类任务中应用广泛。由于网络工作机理不透明,CNN模型难以满足高可靠性实际应用的要求。类激活映射方法常用于可视化CNN模型的决策区域,但现有方法主要基于通道级或空间级类激活权重,且在SAR图像数据集上的应用仍处于起步阶段。基于此,该文从神经元特征提取能力和网络决策依据两个层面出发,提出了一种面向SAR图像的CNN模型可视化方法。首先,基于神经元的激活值,对神经元在其感受野范围内的目标结构学习能力进行可视化,然后提出一种通道-空间混合的类激活映射方法,通过对SAR图像中的重要区域进行定位,为模型的决策过程提供依据。实验结果表明,该方法给出了模型在不同设置下的可解释性分析,有效拓展了卷积神经网络在SAR图像上的可视化应用。Abstract: Convolutional Neural Network (CNN) is widely used for image target classifications in Synthetic Aperture Radar (SAR), but the lack of mechanism transparency prevents it from meeting the practical application requirements, such as high reliability and trustworthiness. The Class Activation Mapping (CAM) method is often used to visualize the decision region of the CNN model. However, existing methods are primarily based on either channel-level or space-level class activation weights, and their research progress is still in its infancy regarding more complex SAR image datasets. Based on this, this paper proposes a CNN model visualization method for SAR images, considering the feature extraction ability of neurons and their current network decisions. Initially, neuronal activation values are used to visualize the capability of neurons to learn a target structure in its corresponding receptive field. Further, a novel CAM-based method combined with channel-wise and spatial-wise weights is proposed, which can provide the foundation for the decision-making process of the trained CNN models by detecting the crucial areas in SAR images. Experimental results showed that this method provides interpretability analysis of the model under different settings and effectively expands the application of CNNs for SAR image visualization.
-
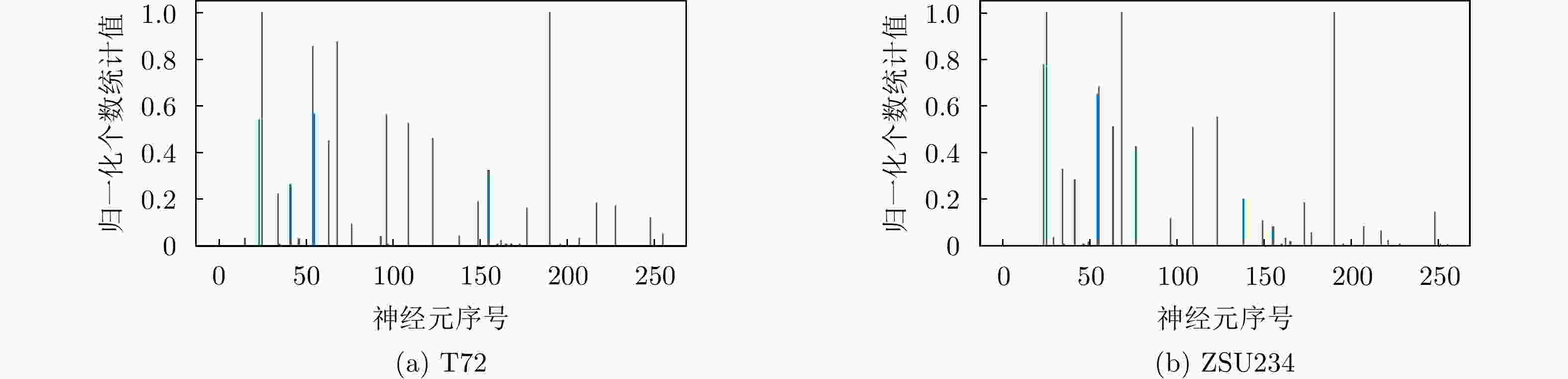
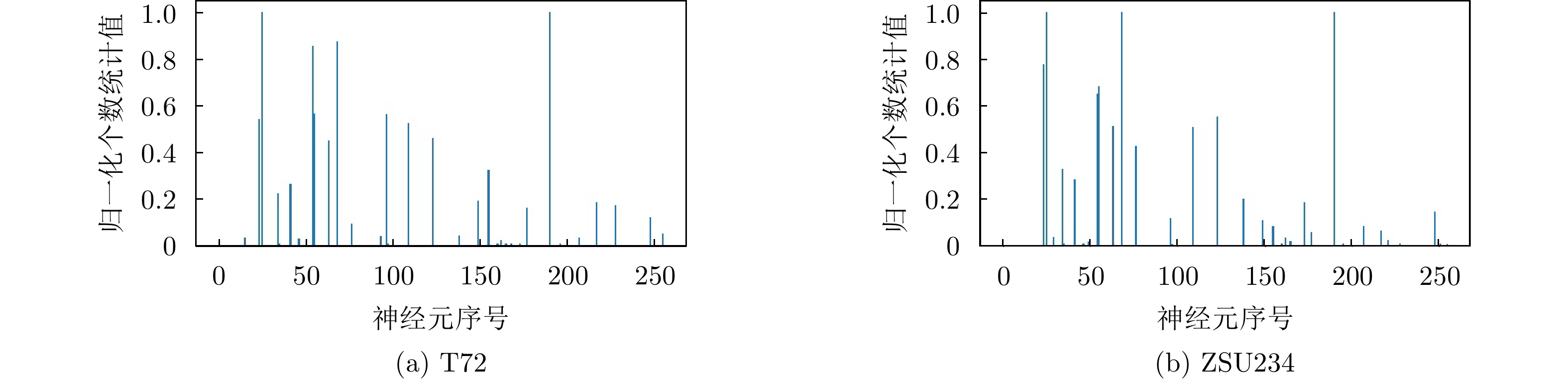
图 5 第12层TOP-9神经元归一化个数统计图
Figure 5. Layer 12 TOP-9 neuron normalization statistics chart
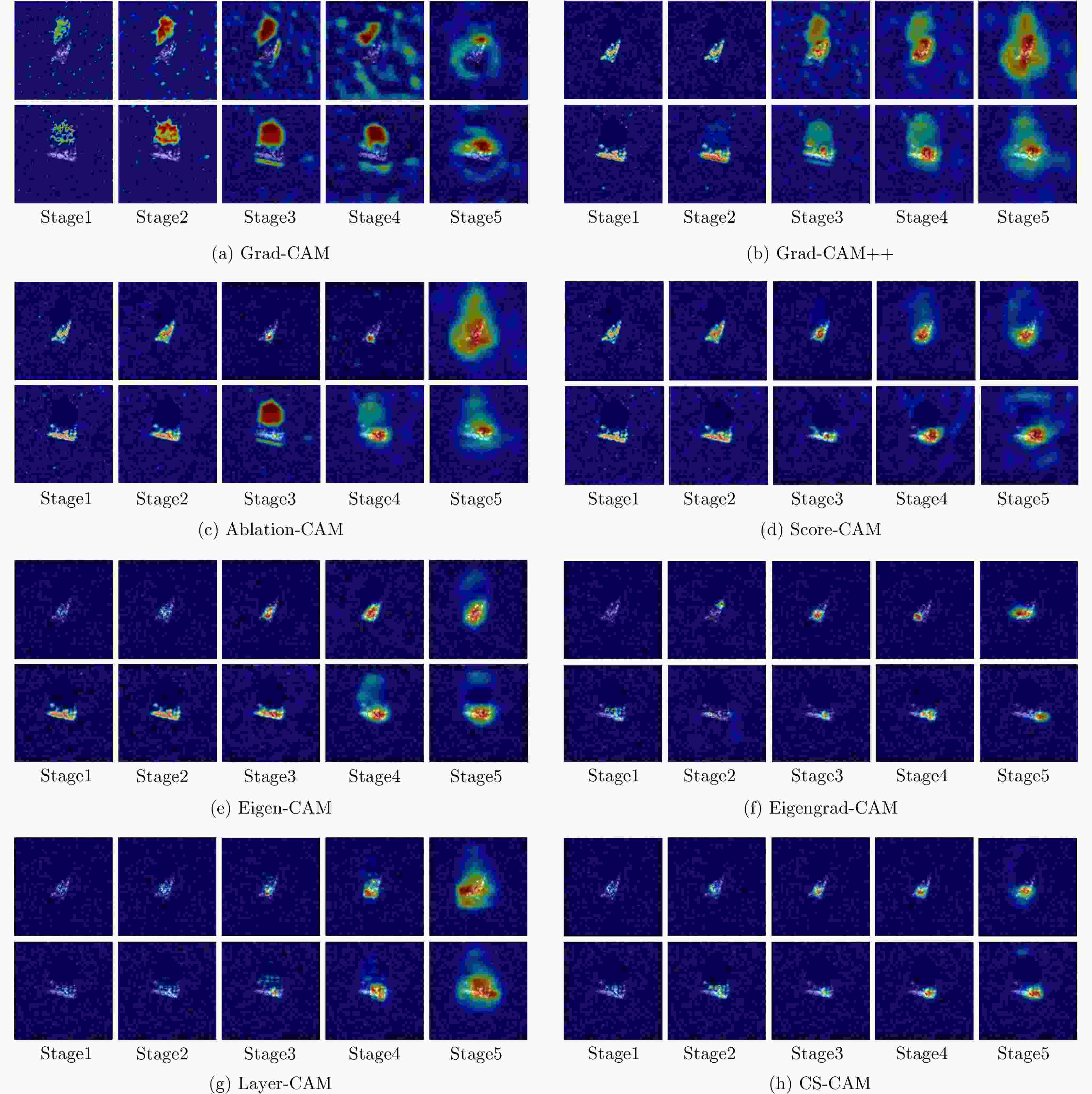
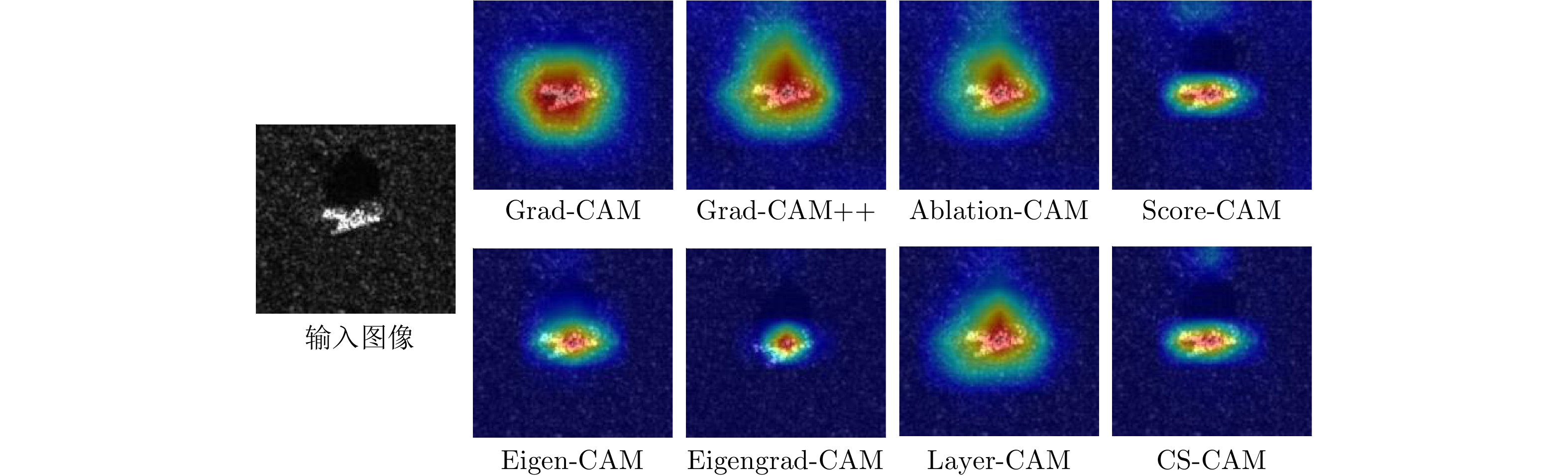
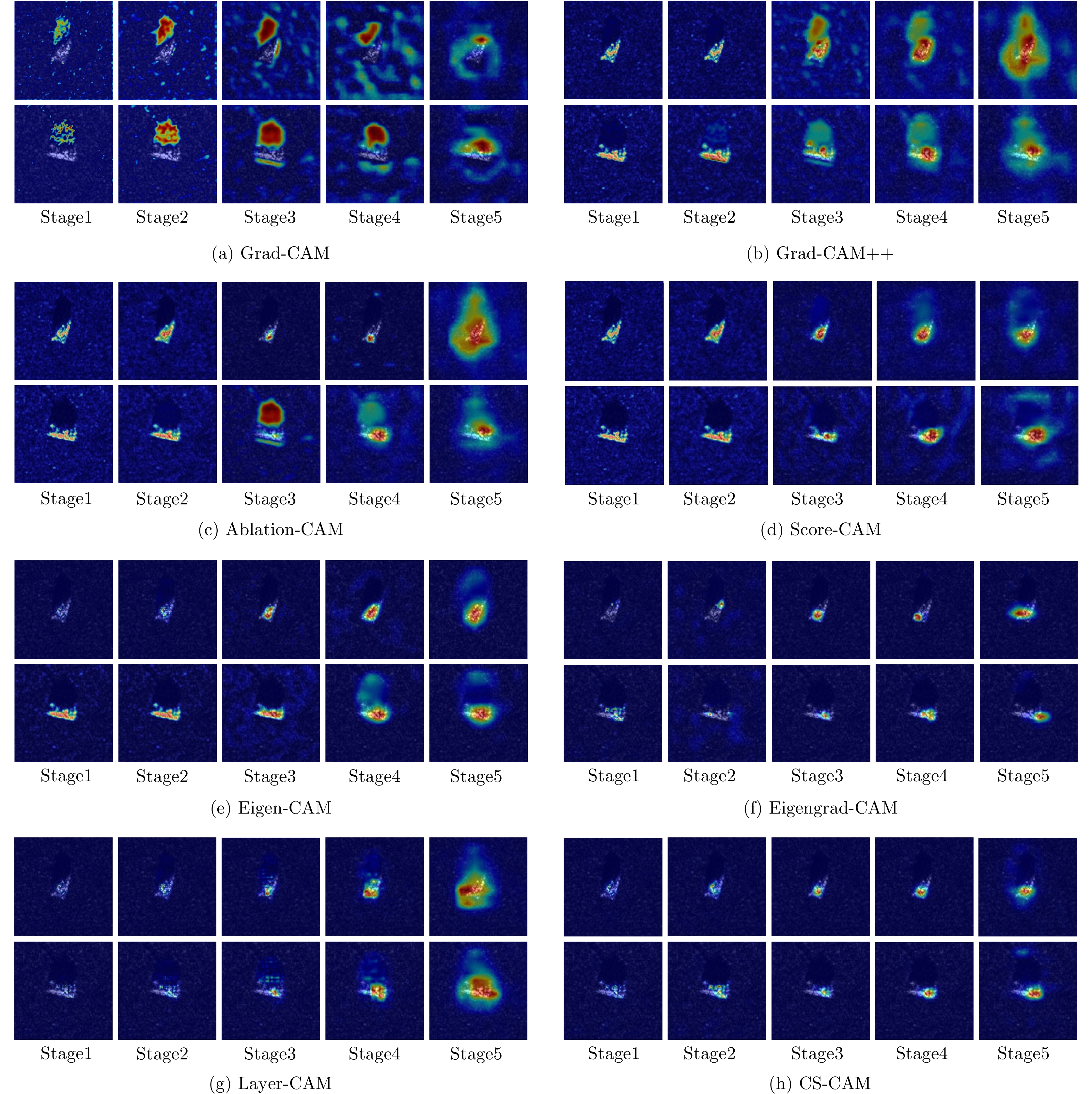
图 8 各类激活映射方法针对CNN不同层的可视化结果
Figure 8. Visualization of CAM-based methods in each stage of CNN
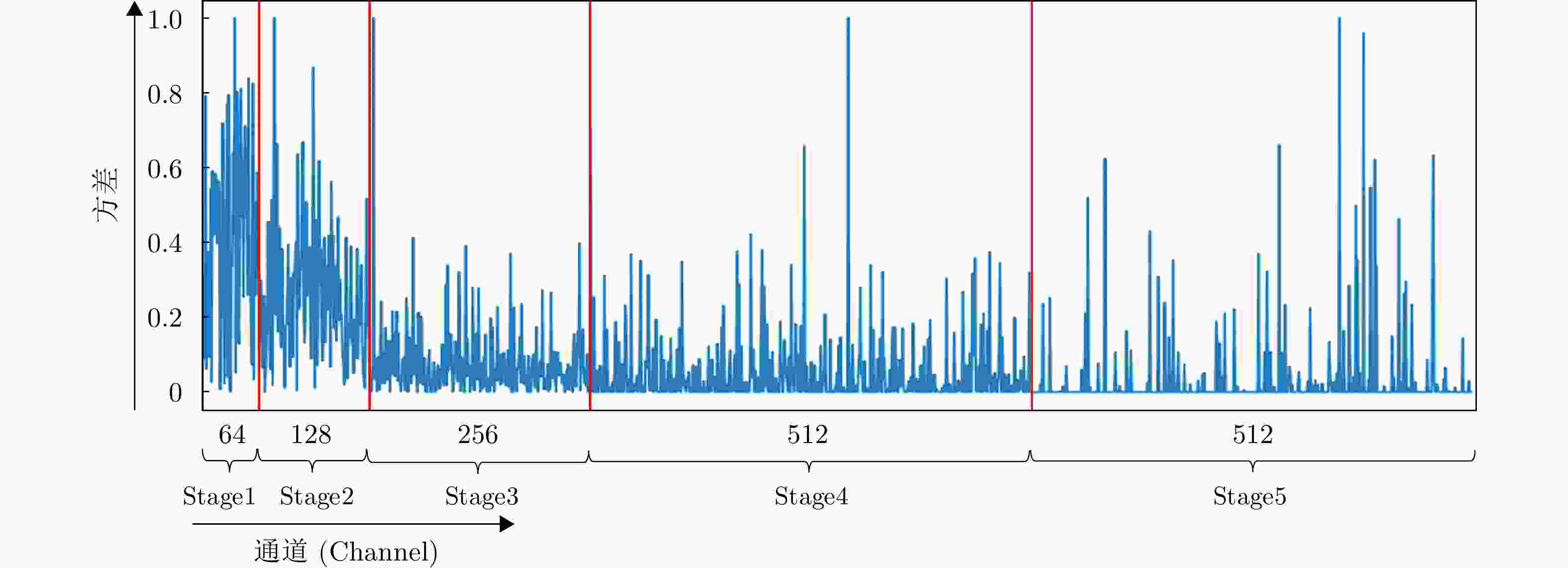
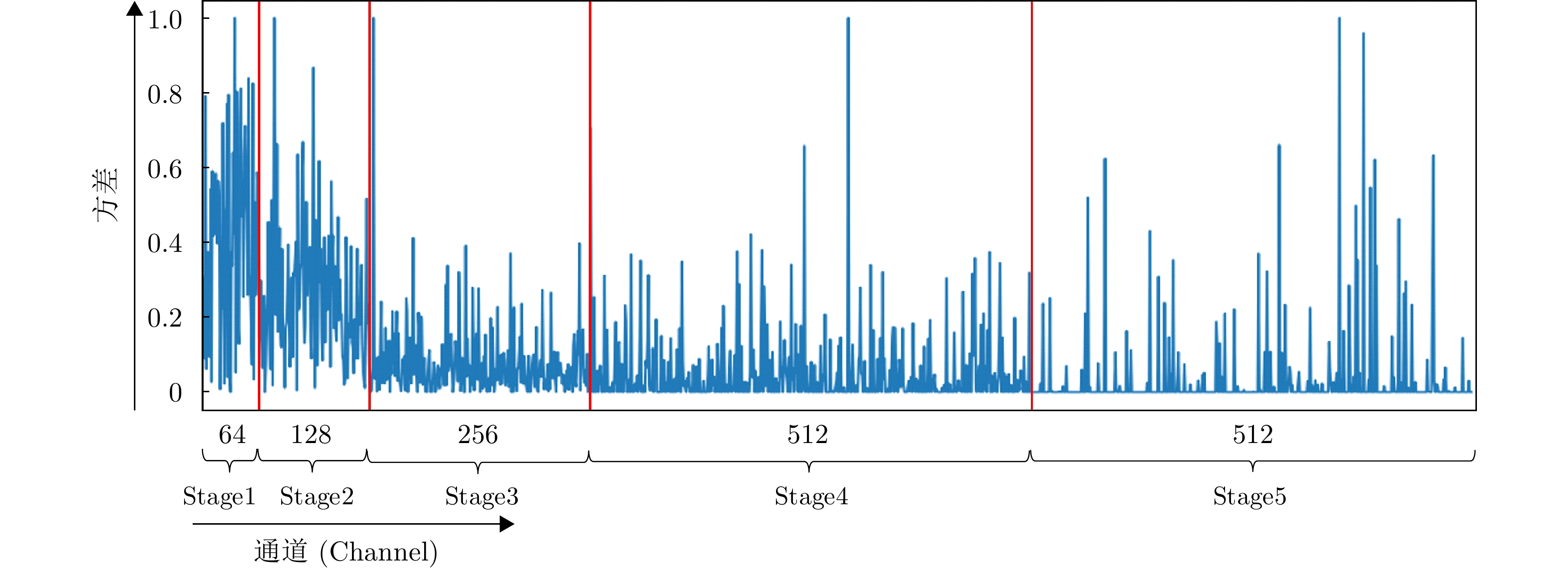
图 9 VGG-16网络各Stage最后一个卷积层内各通道特征图的方差变化图
Figure 9. The variance statistics of the feature maps for each channel in the last convolutional layer of each Stage in VGG-16
表 1 不同类激活映射方法类激活权重计算表
Table 1. Class activation weights for different CAM-based methods
类激活方法名称 类激活权重计算公式 Grad-CAM[31] $a_{j\_{\rm{channel} } }^c = \dfrac{1}{Z}\displaystyle\sum\limits_x {\displaystyle\sum\limits_y {\frac{ {\partial {S^c} } }{ {\partial {\boldsymbol{h} }_j^{(L)}(x,y)} } } }$ Grad-CAM++[32] ${a}_{j\_{\rm{channel} } }^{c}={\displaystyle \sum _{x}{\displaystyle \sum _{y}\frac{\dfrac{ {\partial }^{2}{S}^{c} }{ {\left(\partial { {\boldsymbol{h} } }_{j}^{(L)}(x,y)\right)}^{2} } }{2\dfrac{ {\partial }^{2}{S}^{c} }{ {\left(\partial { {\boldsymbol{h} } }_{j}^{(L)}(x,y)\right)}^{2} }+{\displaystyle \sum _{x}{\displaystyle \sum _{y}{ {\boldsymbol{h} } }_{j}^{(L)}(x,y)\left\{\frac{ {\partial }^{3}{S}^{c} }{ {\left(\partial { {\boldsymbol{h} } }_{j}^{(L)}(x,y)\right)}^{3} }\right\} } } }\cdot{\rm{ReLU} }\left(\frac{\partial {S}^{c} }{\partial { {\boldsymbol{h} } }_{j}^{(L)}(x,y)}\right)} }$ Ablation-CAM[33] $a_{j\_{\rm{channel} } }^c = \dfrac{ { {S^c} - S_j^c} }{ { {S^c} } }$ Score-CAM[34] $a_{j\_{\rm{channel} } }^c = \dfrac{ {\exp\left( {\Delta S_j^c} \right)} }{ {\displaystyle\sum\limits_j {\exp\left( {\Delta S_j^c} \right)} } }$ Eigen-CAM[35] ${ {\boldsymbol{h} }^{(L)} } = {\boldsymbol{U\varSigma} } { {\boldsymbol{V} }^{\rm{T} } } ,{a_{j\_{\rm{channel} } }^c = {{\boldsymbol{v}}_1} }$ Eigengrad-CAM ${ {\boldsymbol{h} } }^{(L)}\cdot \dfrac{1}{Z}{\displaystyle \sum _{x}{\displaystyle \sum _{y}\frac{\partial {S}^{c} }{\partial { {\boldsymbol{h} } }_{j}^{(L)}(x,y)} } }={\boldsymbol{U\varSigma} } { {\boldsymbol{V} } }^{ {\rm{T} } } , {a}_{j\_{\rm{channel} } }^{c} ={{\boldsymbol{v}}}_{1}$ Layer-CAM[36] $a_j^c{\left( {x,y} \right)_{\_{\rm{spatial} } } } = \dfrac{ {\partial {S^c} } }{ {\partial {\boldsymbol{h} }_j^{(L)}(x,y)} }$  下载: 导出CSV
下载: 导出CSV
表 2 MSTAR数据集
Table 2. MSTAR dataset
目标名称 目标类型 训练集(17°俯仰角) 测试集(15°俯仰角) 2S1 自行榴弹炮 299 274 BMP2 步兵战车 232 196 BRDM2 装甲侦察车 298 274 BTR60 装甲侦察车 233 196 BTR70 装甲侦察车 256 195 T62 坦克 299 273 T72 坦克 232 196 ZIL131 军用卡车 299 274 ZSU234 自行高炮 299 274 D7 推土机 299 274
下载: 导出CSV
表 3 MSTAR数据集模型训练结果(%)
Table 3. Model training results (%)
网络模型 训练集识别率 测试集识别率 VGG-16 (RI) 98.7 94.1 VGG-16 (PT) 99.7 98.0
下载: 导出CSV
表 4 定量分析指标结果表
Table 4. Quantitative analysis results
方法 评估指标 Average
Increase (%)Average
Drop (%)Infidelity Max-sensitivity Grad-CAM 13.6 86.4 2.425 0.752 Grad-CAM++ 13.6 64.0 2.987 0.612 Ablation-CAM 4.5 62.1 0.698 0.447 Layer-CAM 13.6 63.1 0.609 0.450 Eigengrad-CAM 13.6 77.8 0.619 0.459 Eigen-CAM 13.6 60.3 0.452 0.452 Score-CAM 13.6 58.6 0.818 0.486 CS-CAM 13.6 57.3 0.537 0.442
下载: 导出CSV
-
[1] PALLOTTA L, CLEMENTE C, DE MAIO A D, et al. Detecting covariance symmetries in polarimetric SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(1): 80–95. doi: 10.1109/TGRS.2016.2595626. [2] WANG Zhen, WANG Shuang, XU Caijin, et al. SAR images super-resolution via cartoon-texture image decomposition and jointly optimized regressors[C]. 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, USA, 2017: 1668–1671. [3] LI Weike, ZOU Bin, and ZHANG Lamei. Ship detection in a large scene SAR image using image uniformity description factor[C]. 2017 SAR in Big Data Era: Models, Methods and Applications, Beijing, China, 2017: 1–5. [4] YUAN Ye, WU Yanxia, FU Yan, et al. An advanced SAR image despeckling method by bernoulli-sampling-based self-supervised deep learning[J]. Remote Sensing, 2021, 13(18): 3636. doi: 10.3390/rs13183636. [5] SHU Yuanjun, LI Wei, YANG Menglong, et al. Patch-based change detection method for SAR images with label updating strategy[J]. Remote Sensing, 2021, 13(7): 1236. doi: 10.3390/rs13071236. [6] CHEN Sizhe, WANG Haipeng, XU Feng, et al. Target classification using the deep convolutional networks for SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(8): 4806–4817. doi: 10.1109/TGRS.2016.2551720. [7] 潘宗序, 安全智, 张冰尘. 基于深度学习的雷达图像目标识别研究进展[J]. 中国科学: 信息科学, 2019, 49(12): 1626–1639. doi: 10.1360/ssi-2019-0093.PAN Zongxu, AN Quanzhi, and ZHANG Bingchen. Progress of deep learning-based target recognition in radar images[J]. SCIENTIA SINICA Informationis, 2019, 49(12): 1626–1639. doi: 10.1360/ssi-2019-0093. [8] 贺丰收, 何友, 刘准钆, 等. 卷积神经网络在雷达自动目标识别中的研究进展[J]. 电子与信息学报, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899.HE Fengshou, HE You, LIU Zhunga, et al. Research and development on applications of convolutional neural networks of radar automatic target recognition[J]. Journal of Electronics &Information Technology, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899. [9] ZHAO Juanping, GUO Weiwei, ZHANG Zenghui, et al. A coupled convolutional neural network for small and densely clustered ship detection in SAR images[J]. Science China Information Sciences, 2019, 62(4): 42301. doi: 10.1007/s11432-017-9405-6. [10] 杜兰, 王兆成, 王燕, 等. 复杂场景下单通道SAR目标检测及鉴别研究进展综述[J]. 雷达学报, 2020, 9(1): 34–54. doi: 10.12000/JR19104.DU Lan, WANG Zhaocheng, WANG Yan, et al. Survey of research progress on target detection and discrimination of single-channel SAR images for complex scenes[J]. Journal of Radars, 2020, 9(1): 34–54. doi: 10.12000/JR19104. [11] 徐丰, 王海鹏, 金亚秋. 深度学习在SAR目标识别与地物分类中的应用[J]. 雷达学报, 2017, 6(2): 136–148. doi: 10.12000/JR16130.XU Feng, WANG Haipeng, and JIN Yaqiu. Deep learning as applied in SAR target recognition and terrain classification[J]. Journal of Radars, 2017, 6(2): 136–148. doi: 10.12000/JR16130. [12] 黄钟泠, 姚西文, 韩军伟. 面向SAR图像解译的物理可解释深度学习技术进展与探讨[J]. 雷达学报, 2022, 11(1): 107–125. doi: 10.12000/JR21165.HUANG Zhongling, YAO Xiwen, and HAN Junwei. Progress and perspective on physically explainable deep learning for synthetic aperture radar image interpretation[J]. Journal of Radars, 2022, 11(1): 107–125. doi: 10.12000/JR21165. [13] DATCU M, HUANG Zhongling, ANGHEL A, et al. Explainable, physics-aware, trustworthy artificial intelligence: A paradigm shift for synthetic aperture radar[J]. IEEE Geoscience and Remote Sensing Magazine, 2023, 11(1): 8–25. doi: 10.1109/MGRS.2023.3237465. [14] LI Yi and DU Lan. Design of the physically interpretable sar target recognition network combined with electromagnetic scattering characteristics[C]. 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 2022: 4988–4991. [15] 李玮杰, 杨威, 刘永祥, 等. 雷达图像深度学习模型的可解释性研究与探索[J]. 中国科学: 信息科学, 2022, 52(6): 1114–1134. doi: 10.1360/SSI-2021-0102.LI Weijie, YANG Wei, LIU Yongxiang, et al. Research and exploration on the interpretability of deep learning model in radar image[J]. SCIENTIA SINICA Informationis, 2022, 52(6): 1114–1134. doi: 10.1360/SSI-2021-0102. [16] FENG Sijia, JI Kefeng, WANG Fulai, et al. Electromagnetic scattering feature (ESF) module embedded network based on ASC model for robust and interpretable SAR ATR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5235415. doi: 10.1109/TGRS.2022.3208333. [17] LI Chen, DU Lan, LI Yi, et al. A novel SAR target recognition method combining electromagnetic scattering information and GCN[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4508705. doi: 10.1109/LGRS.2022.3178234. [18] LIU Zhunga, WANG Longfei, WEN Zaidao, et al. Multilevel scattering center and deep feature fusion learning framework for SAR target recognition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5227914. doi: 10.1109/TGRS.2022.3174703. [19] ZHANG Jinsong, XING Mengdao, and XIE Yiyuan. FEC: A feature fusion framework for SAR target recognition based on electromagnetic scattering features and deep CNN features[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(3): 2174–2187. doi: 10.1109/TGRS.2020.3003264. [20] FENG Sijia, JI Kefeng, ZHANG Linbin, et al. SAR target classification based on integration of ASC parts model and deep learning algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 10213–10225. doi: 10.1109/JSTARS.2021.3116979. [21] LI Yi, DU Lan, and WEI Di. Multiscale CNN based on component analysis for SAR ATR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5211212. doi: 10.1109/TGRS.2021.3100137. [22] FENG Sijia, JI Kefeng, WANG Fulai, et al. PAN: Part attention network integrating electromagnetic characteristics for interpretable SAR vehicle target recognition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 1–17. doi: 10.1109/TGRS.2023.3256399. [23] DATCH M, ANDREI V, DUMITRU C O, et al. Explainable deep learning for SAR data[C]. Φ-Week, Frascati, Italy, 2019. [24] SU Shenghan, CUI Ziteng, GUO Weiwei, et al. Explainable analysis of deep learning methods for SAR image classification[C]. 2022 – 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 2022, 2570–2573. [25] 郭炜炜, 张增辉, 郁文贤, 等. SAR图像目标识别的可解释性问题探讨[J]. 雷达学报, 2020, 9(3): 462–476. doi: 10.12000/JR20059.GUO Weiwei, ZHANG Zenghui, YU Wenxian, et al. Perspective on explainable SAR target recognition[J]. Journal of Radars, 2020, 9(3): 462–476. doi: 10.12000/JR20059. [26] BELLONI C, BALLERI A, AOUF N, et al. Explainability of deep SAR ATR through feature analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 659–673. doi: 10.1109/TAES.2020.3031435. [27] PANATI C, WAGNER S, and BRÜGGENWIRTH S. Feature relevance evaluation using grad-CAM, LIME and SHAP for deep learning SAR data classification[C]. 2022 23rd International Radar Symposium, Gdansk, Poland, 2022: 457–462. [28] SUNDARARAJAN M, TALY A, and YAN Qiqi. Axiomatic attribution for deep networks[C]. 34th International Conference on Machine Learning, Sydney, Australia, 2017. [29] LUO Wenjie, LI Yujia, URTASUN R, et al. Understanding the effective receptive field in deep convolutional neural networks[C]. 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 2016: 4898–4906. [30] ZHOU Bolei, KHOSLA A, LAPEDRIZA A, et al. Learning deep features for discriminative localization[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 2921–2929. [31] SELVARAJU R R, COGSWELL M, DAS A, et al. Grad-CAM: Visual explanations from deep networks via gradient-based localization[C]. 2017 IEEE International Conference on Computer Vision, Venice, Italy, 2017: 618–626. [32] CHATTOPADHAY A, SARKAR A, HOWLADER P, et al. Grad-CAM++: Generalized gradient-based visual explanations for deep convolutional networks[C]. 2018 IEEE Winter Conference on Applications of Computer Vision, Lake Tahoe, USA, 2018: 839–847. [33] DESAI S and RAMASWAMY H G. Ablation-CAM: Visual explanations for deep convolutional network via gradient-free localization[C]. 2020 IEEE Winter Conference on Applications of Computer Vision, Snowmass, USA, 2020: 972–980. [34] WANG Haofan, WANG Zifan, DU Mengnan, et al. Score-CAM: Score-weighted visual explanations for convolutional neural networks[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, USA, 2020: 111–119. [35] MUHAMMAD M B and YEASIN M. Eigen-CAM: Class activation map using principal components[C]. 2020 International Joint Conference on Neural Networks, Glasgow, UK, 2020: 1–7. [36] JIANG Pengtao, ZHANG Changbin, HOU Qibin, et al. LayerCAM: Exploring hierarchical class activation maps for localization[J]. IEEE Transactions on Image Processing, 2021, 30: 5875–5888. doi: 10.1109/TIP.2021.3089943. [37] KEYDEL E R, LEE S W, and MOORE J T. MSTAR extended operating conditions: A tutorial[C]. SPIE 2757, Algorithms for Synthetic Aperture Radar Imagery III, Orlando, USA, 1996. [38] SIMONYAN K and ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[C]. International Conference on Learning Representations. San Diego, USA, 2015. [39] YEH C K, HSIEH C Y, SUGGALA A S, et al. On the (in)fidelity and sensitivity of explanations[C]. 33rd International Conference on Neural Information Processing Systems, Vancouver, Canada, 2019. [40] ADEBAYO J, GILMER J, MUELLY M, et al. Sanity checks for saliency maps[C]. 32nd International Conference on Neural Information Processing Systems, Montréal, Canada, 2018: 9525–9536. [41] HUANG Zhongling, PAN Zongxu, and LEI Bin. What, where, and how to transfer in SAR target recognition based on deep CNNs[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(4): 2324–2336. doi: 10.1109/TGRS.2019.2947634. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

