
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor WorkCurrent Issue
2026
Vol. 15,
No. 2
 Previous Issue
Previous Issue
2026,
15(2):
387-408.
 Abstract
Abstract 4613KB
4613KB
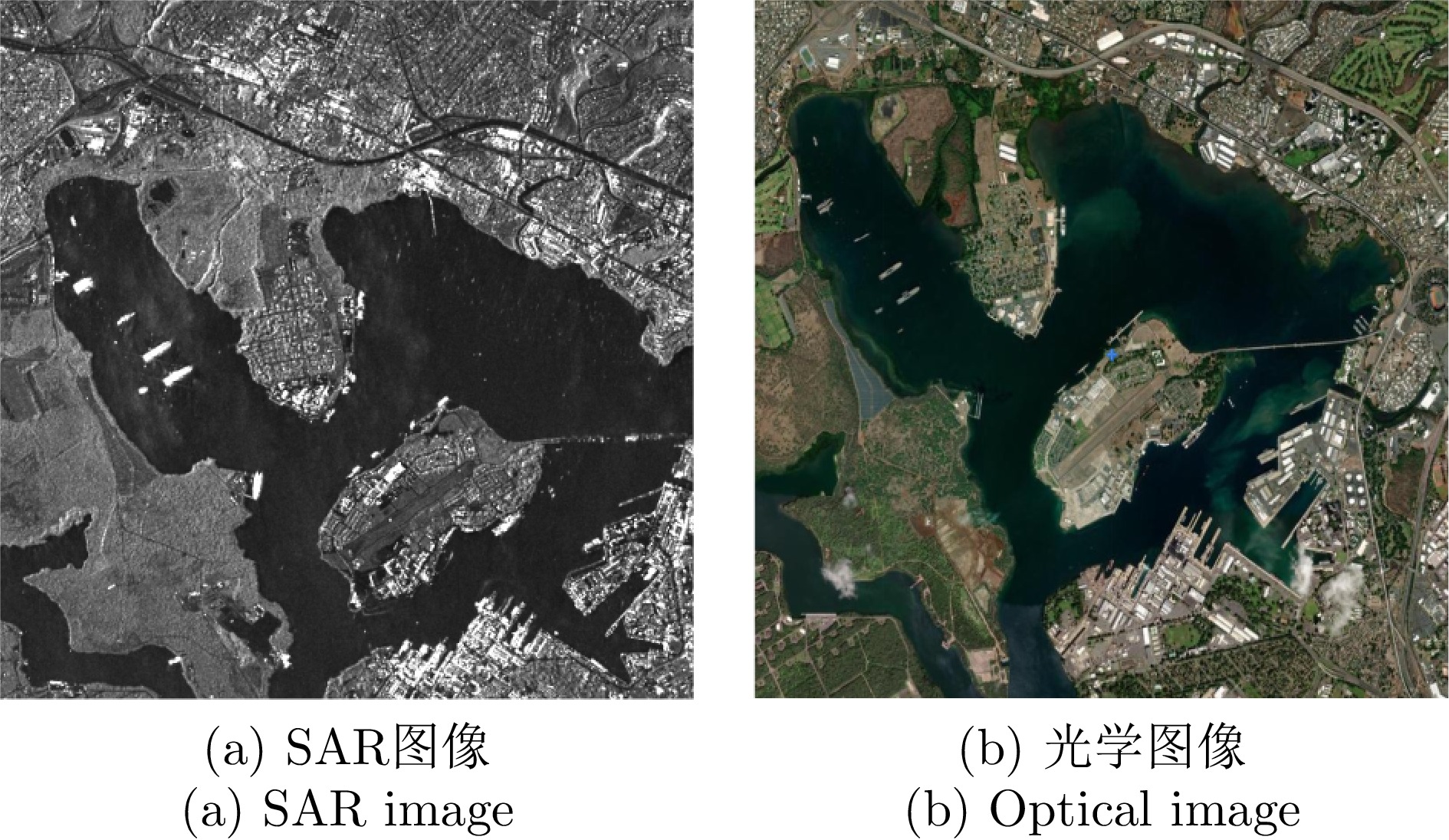
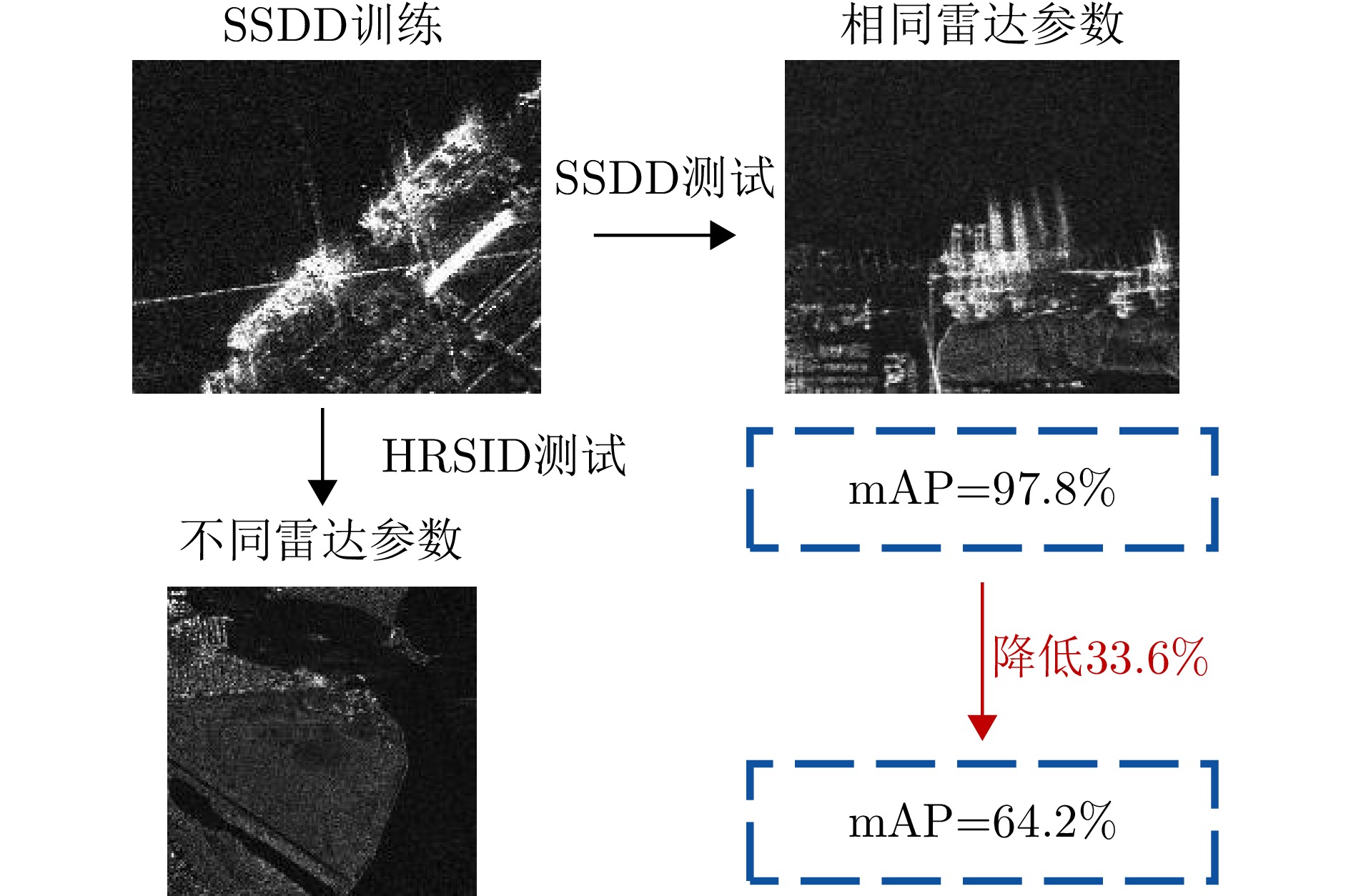
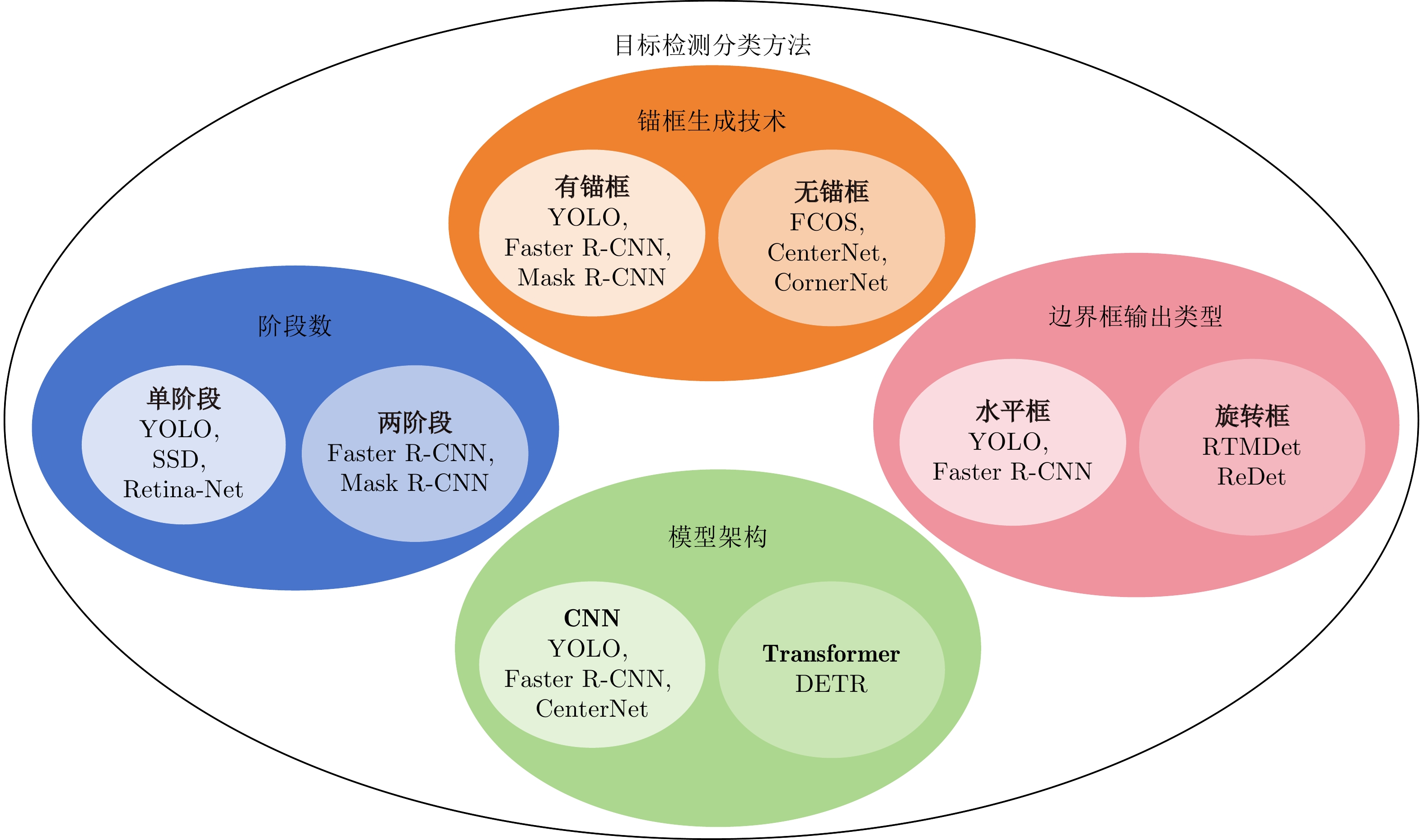
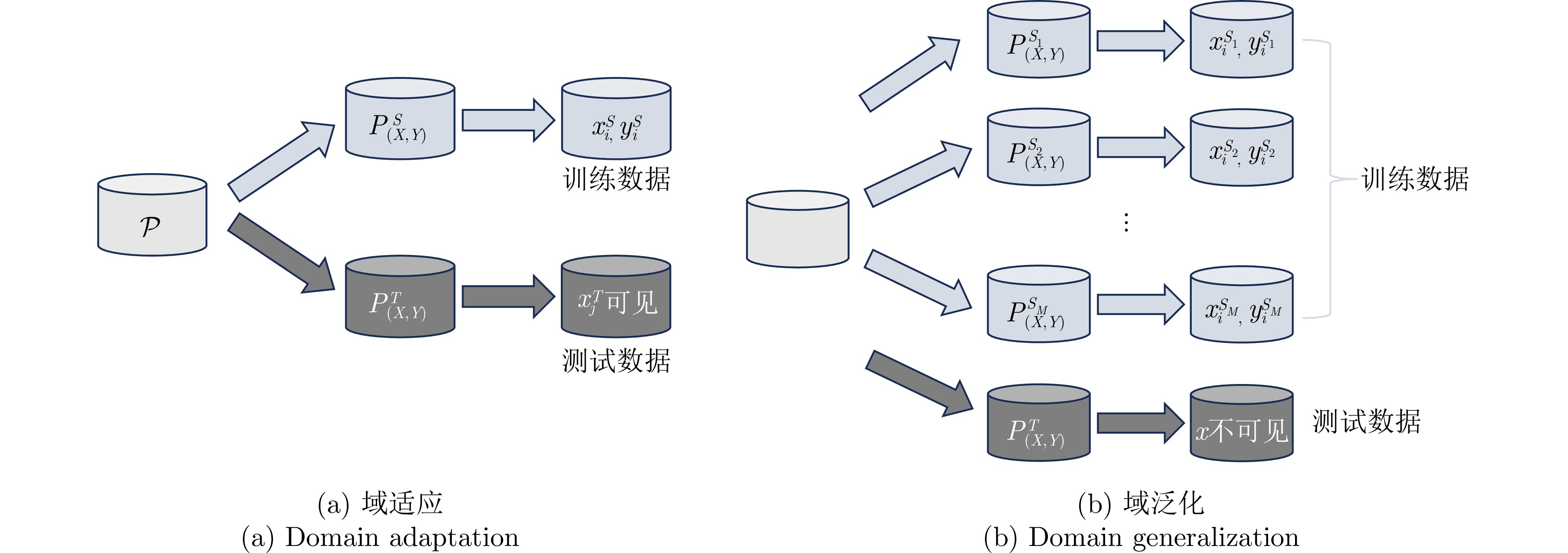
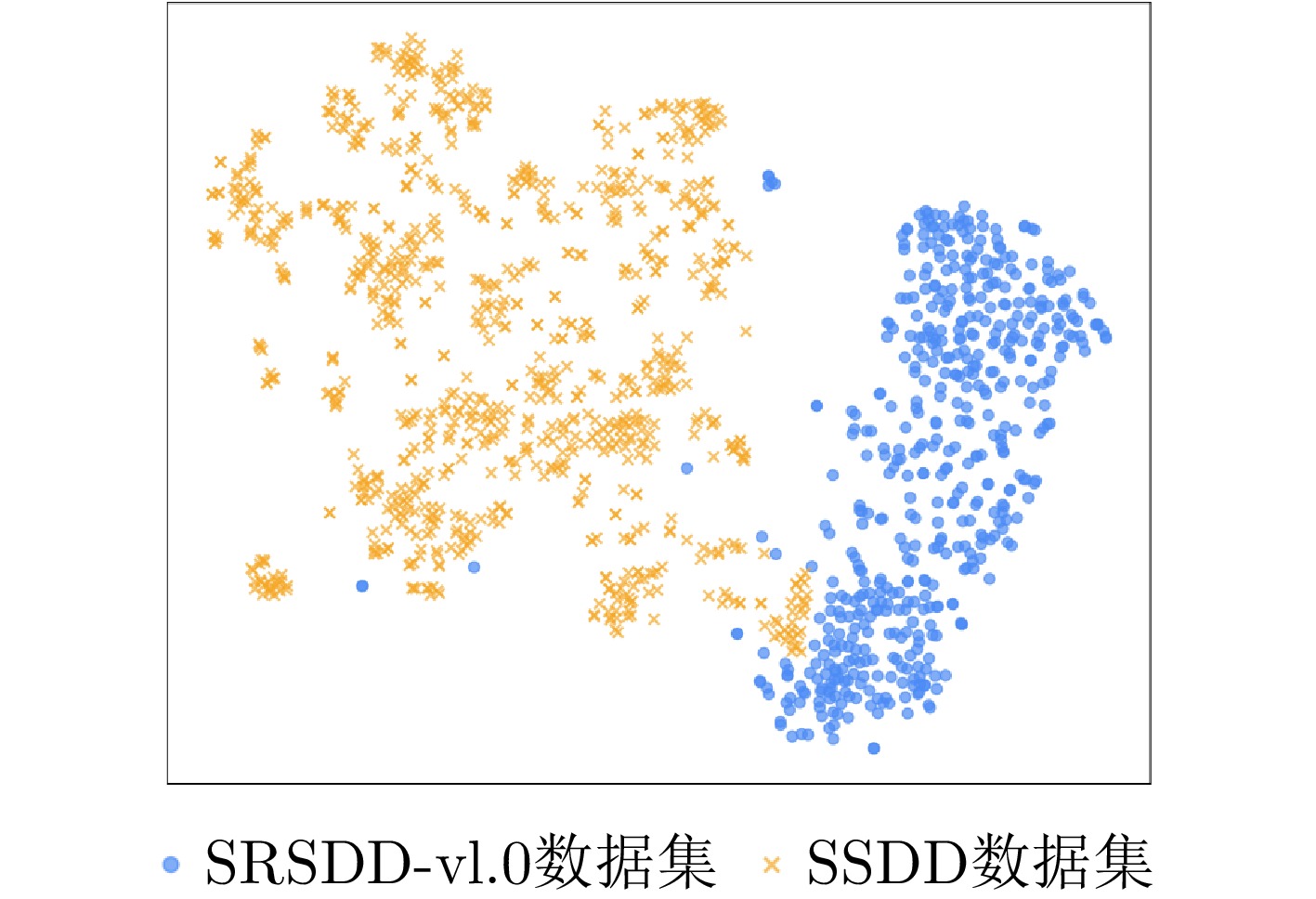
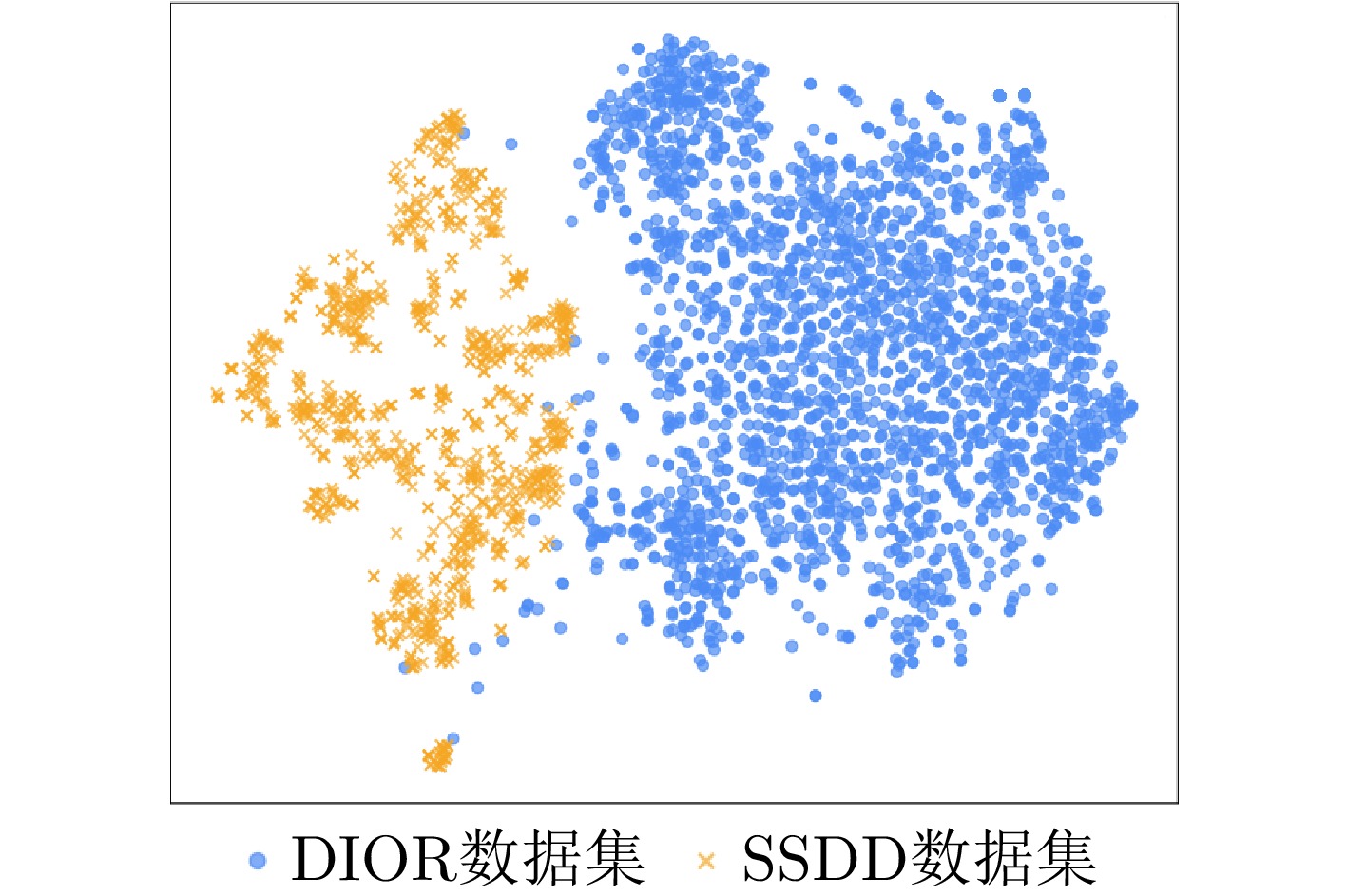
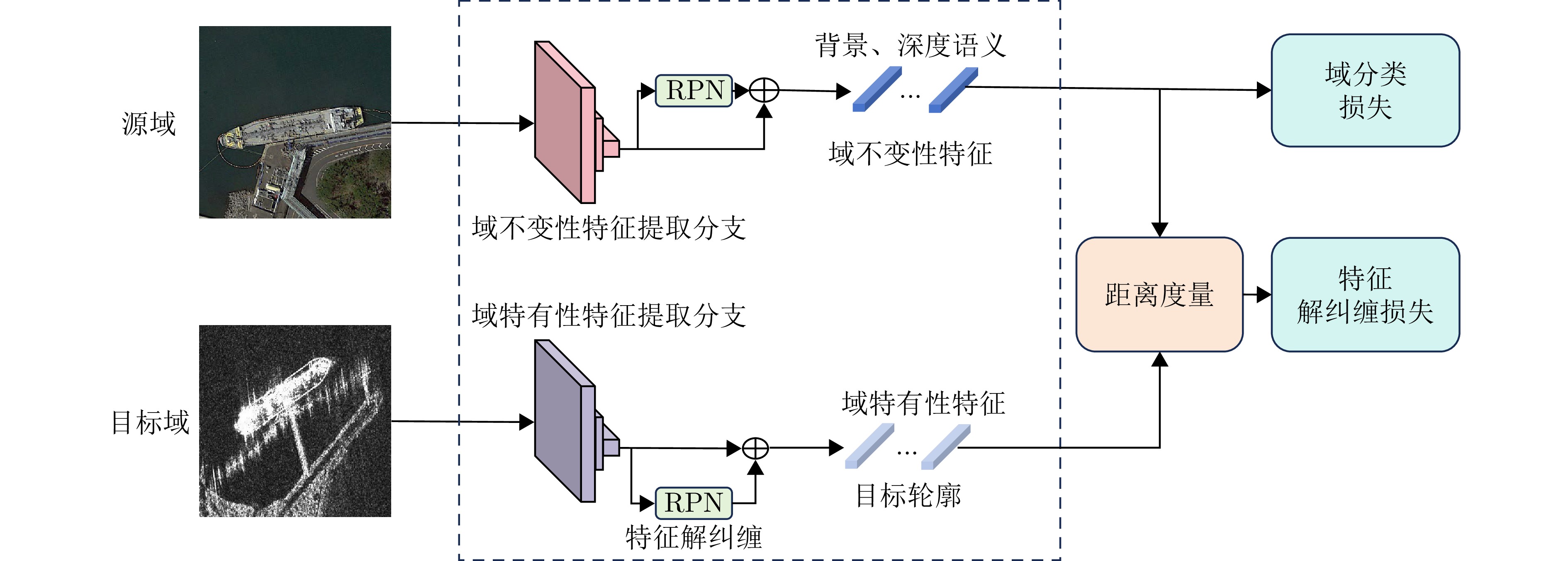
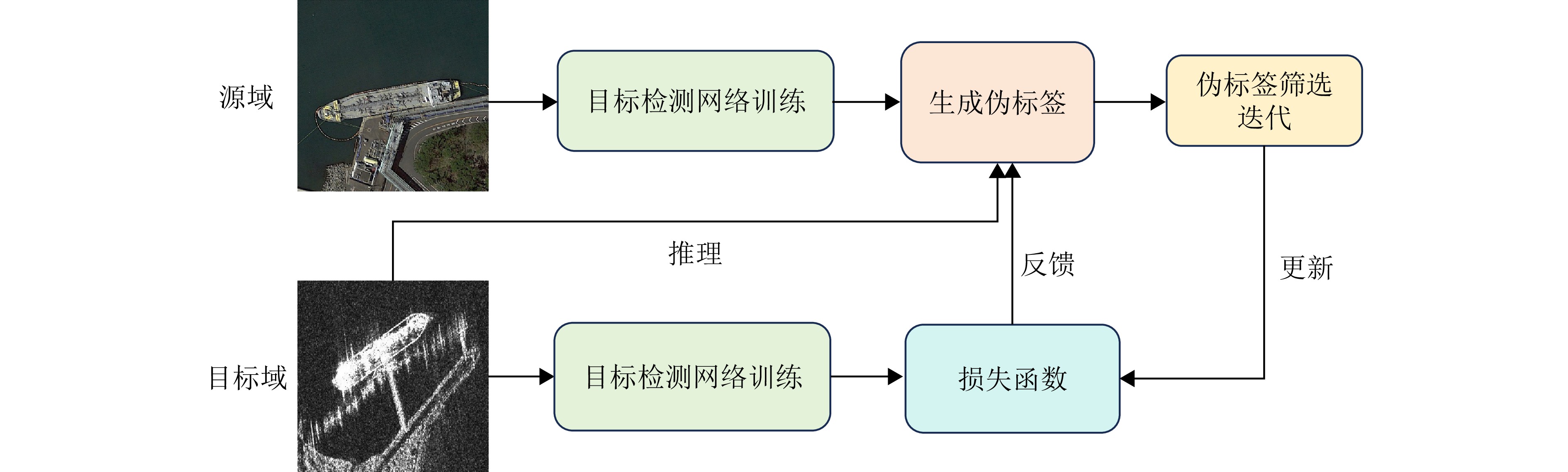
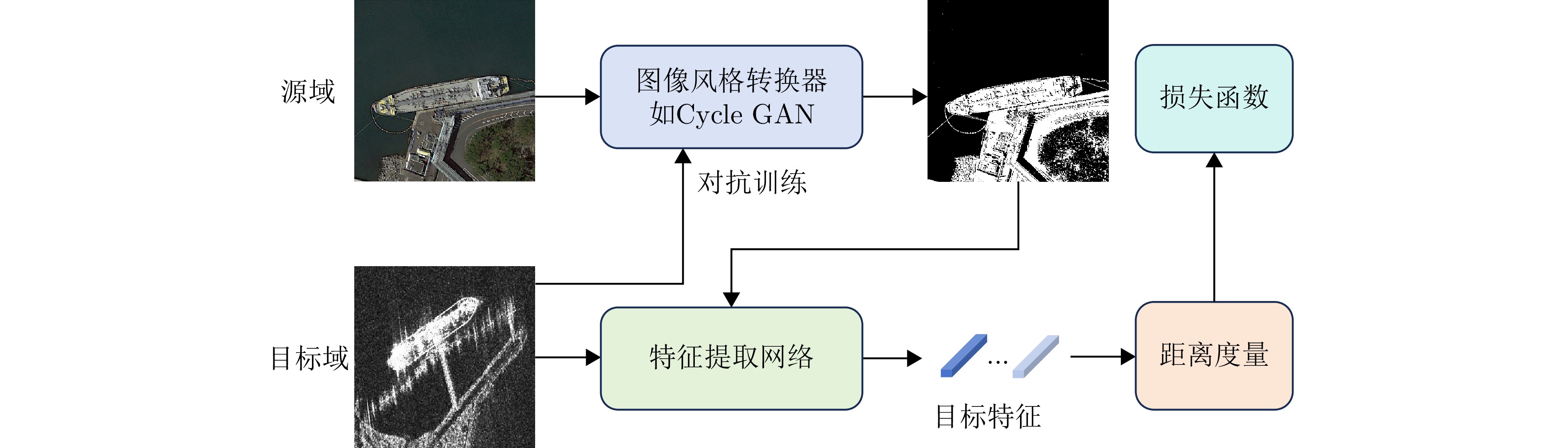
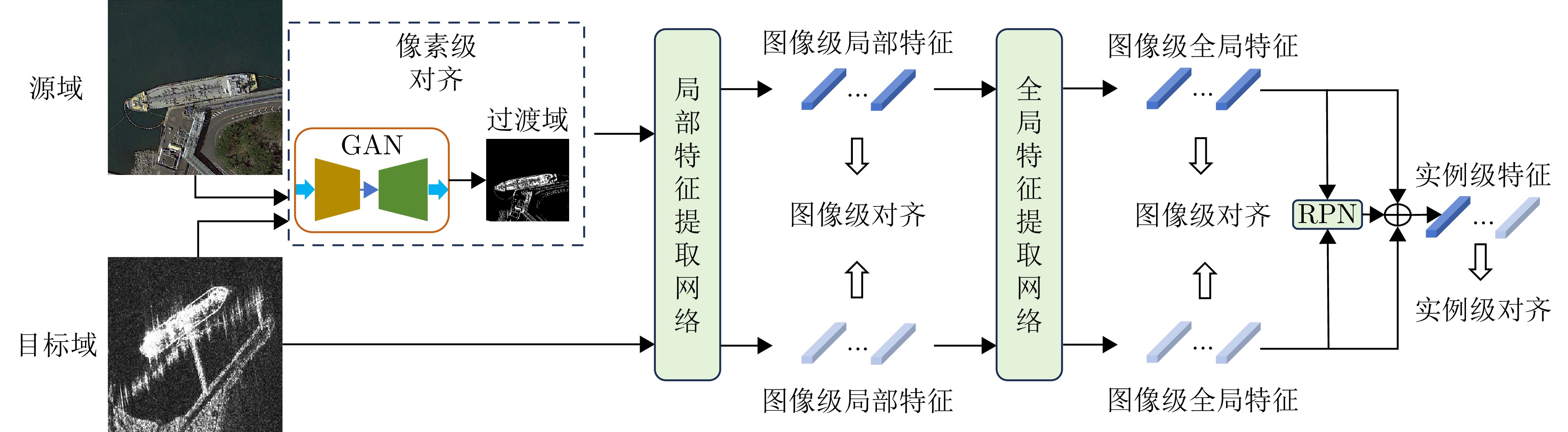
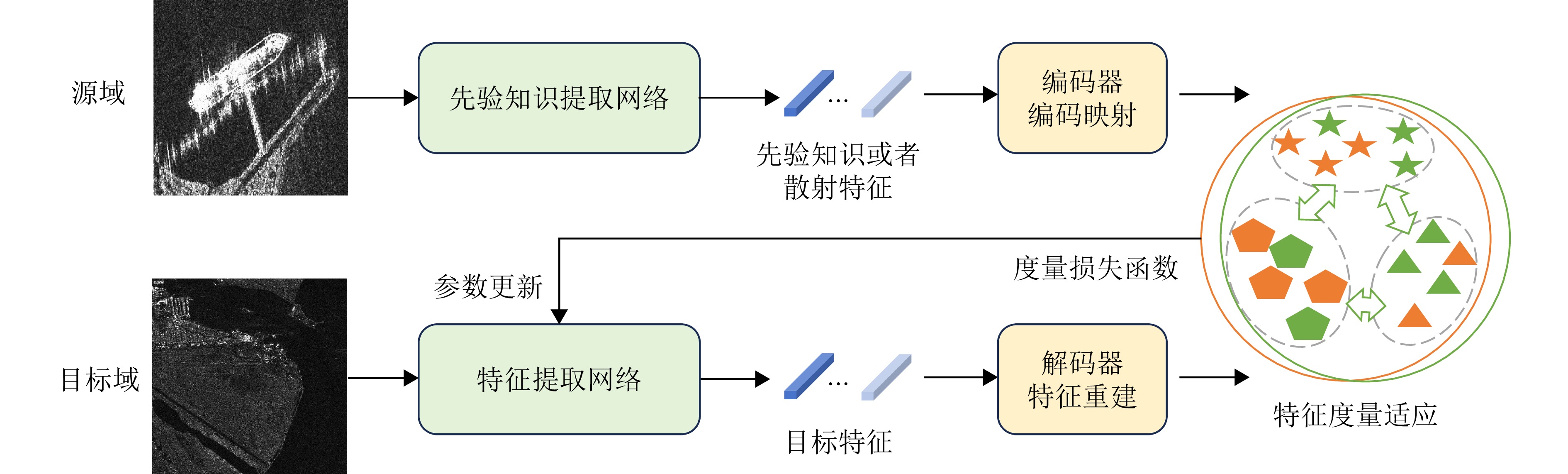
Deep learning is primarily used for target detection in Synthetic Aperture Radar (SAR) images; however, its performance heavily relies on large-scale labeled datasets. The detection performance of deep learning models degrades when applied to SAR data with varying distributions, hindering their real-world applicability. In addition, manual labeling of SAR data is costly. Hence, cross-domain learning strategies based on multisource information are being explored to address these challenges. These strategies can assist detection models in realizing cross-domain knowledge migration by integrating prior information from optical remote sensing images or heterogeneous SAR images acquired from different sensors. This paper focuses on cross-domain learning technologies within the deep learning framework. In addition, it provides a systematic overview of the latest research progress in this field and analyzes the core issues, advantages, and applicable scenarios of existing technologies from a methodological perspective. It outlines future research directions based on the law of technological evolution, aiming to offer theoretical support and methodological references to enhance the generalizability of target detection in SAR images.
Deep learning is primarily used for target detection in Synthetic Aperture Radar (SAR) images; however, its performance heavily relies on large-scale labeled datasets. The detection performance of deep learning models degrades when applied to SAR data with varying distributions, hindering their real-world applicability. In addition, manual labeling of SAR data is costly. Hence, cross-domain learning strategies based on multisource information are being explored to address these challenges. These strategies can assist detection models in realizing cross-domain knowledge migration by integrating prior information from optical remote sensing images or heterogeneous SAR images acquired from different sensors. This paper focuses on cross-domain learning technologies within the deep learning framework. In addition, it provides a systematic overview of the latest research progress in this field and analyzes the core issues, advantages, and applicable scenarios of existing technologies from a methodological perspective. It outlines future research directions based on the law of technological evolution, aiming to offer theoretical support and methodological references to enhance the generalizability of target detection in SAR images.
2026,
15(2):
409-440.
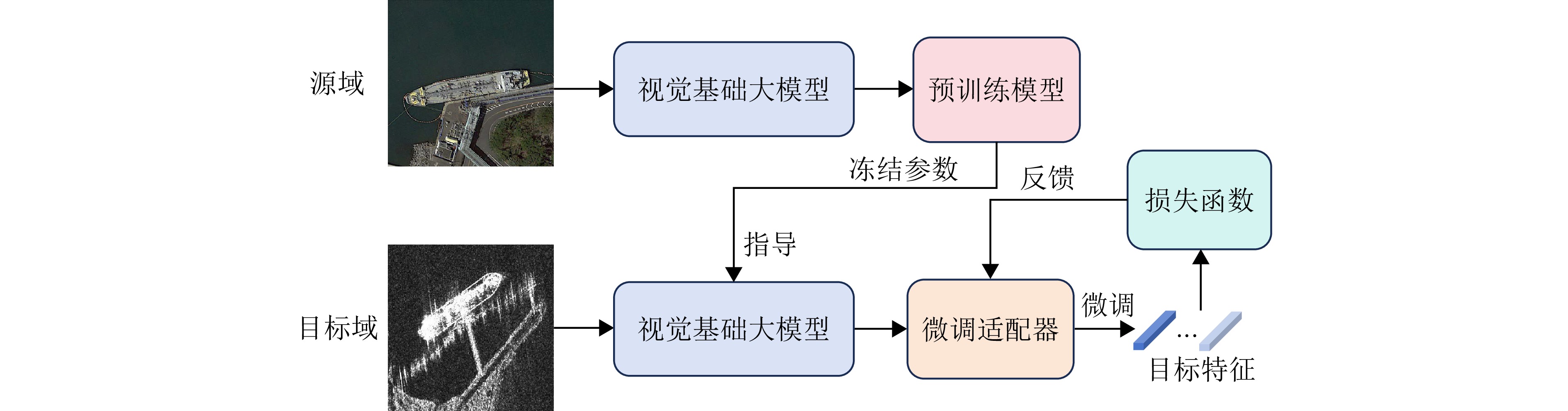
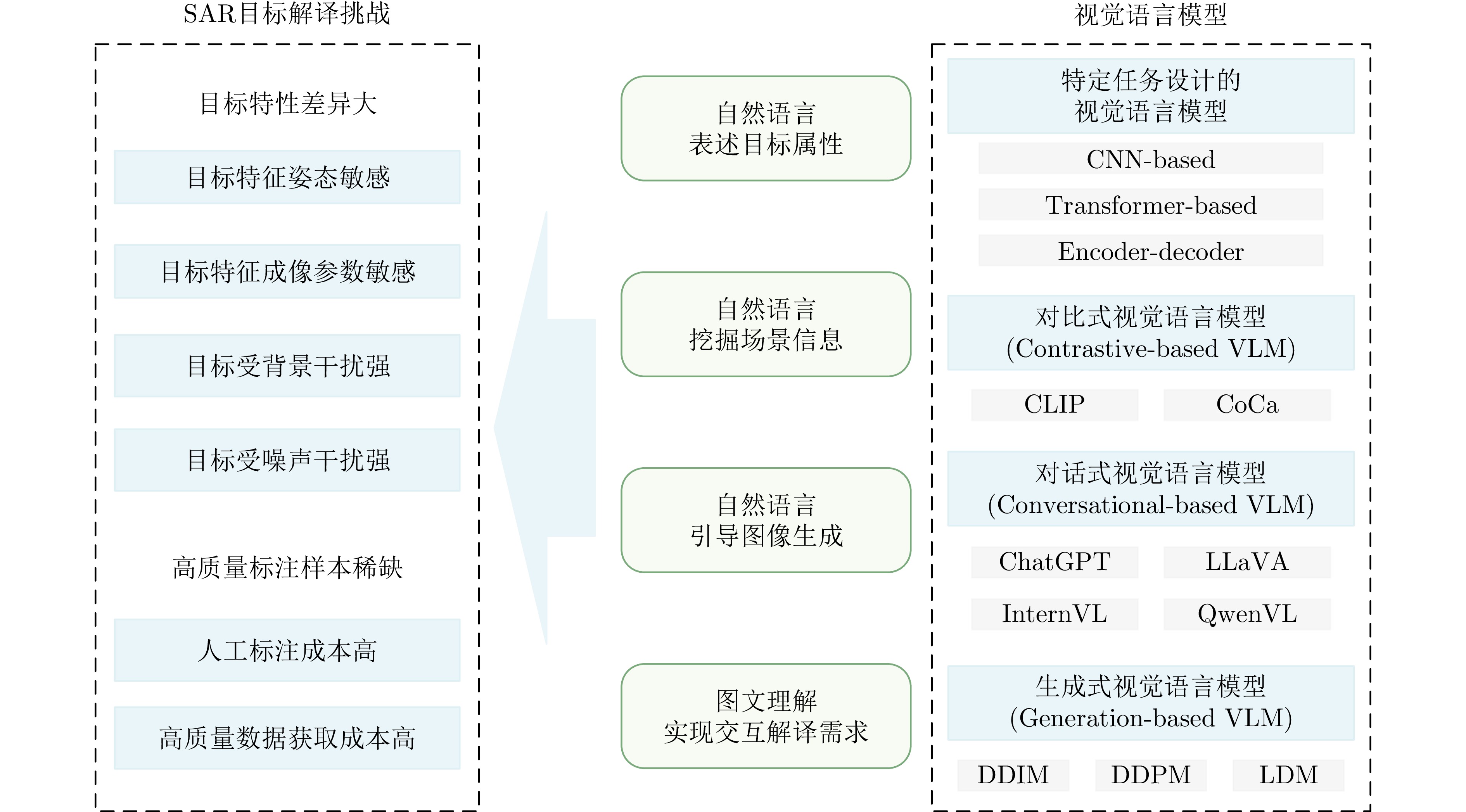
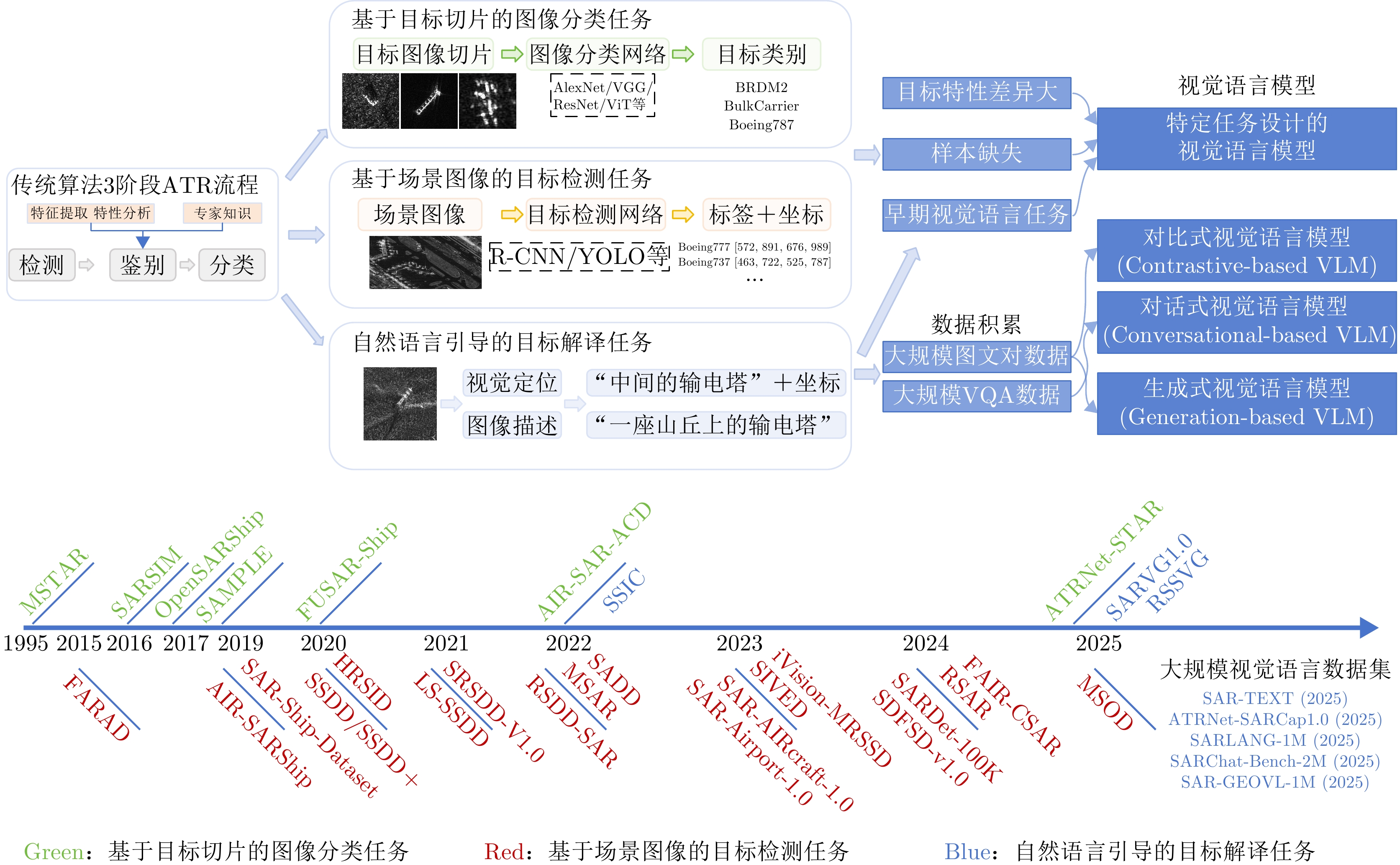
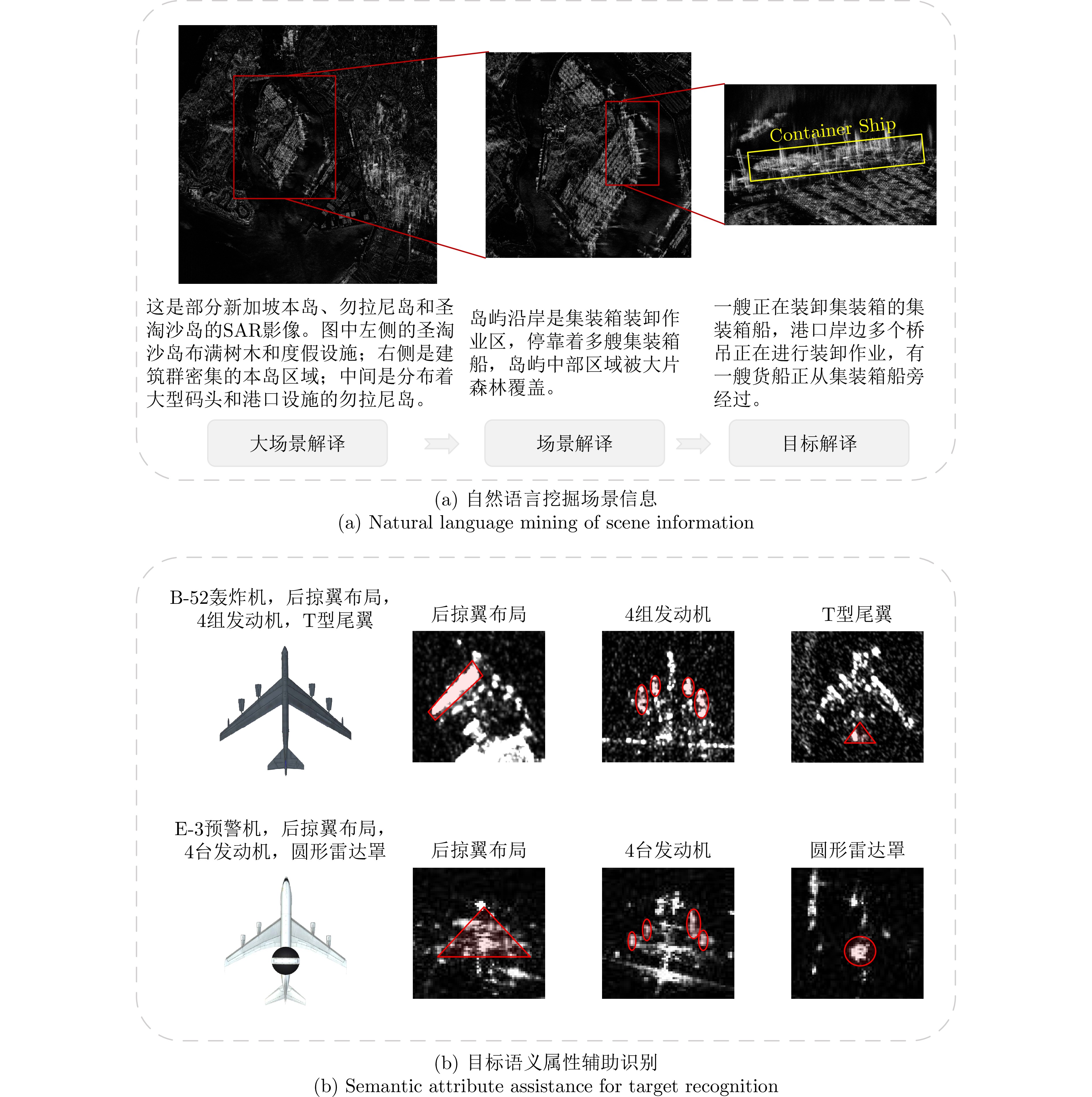
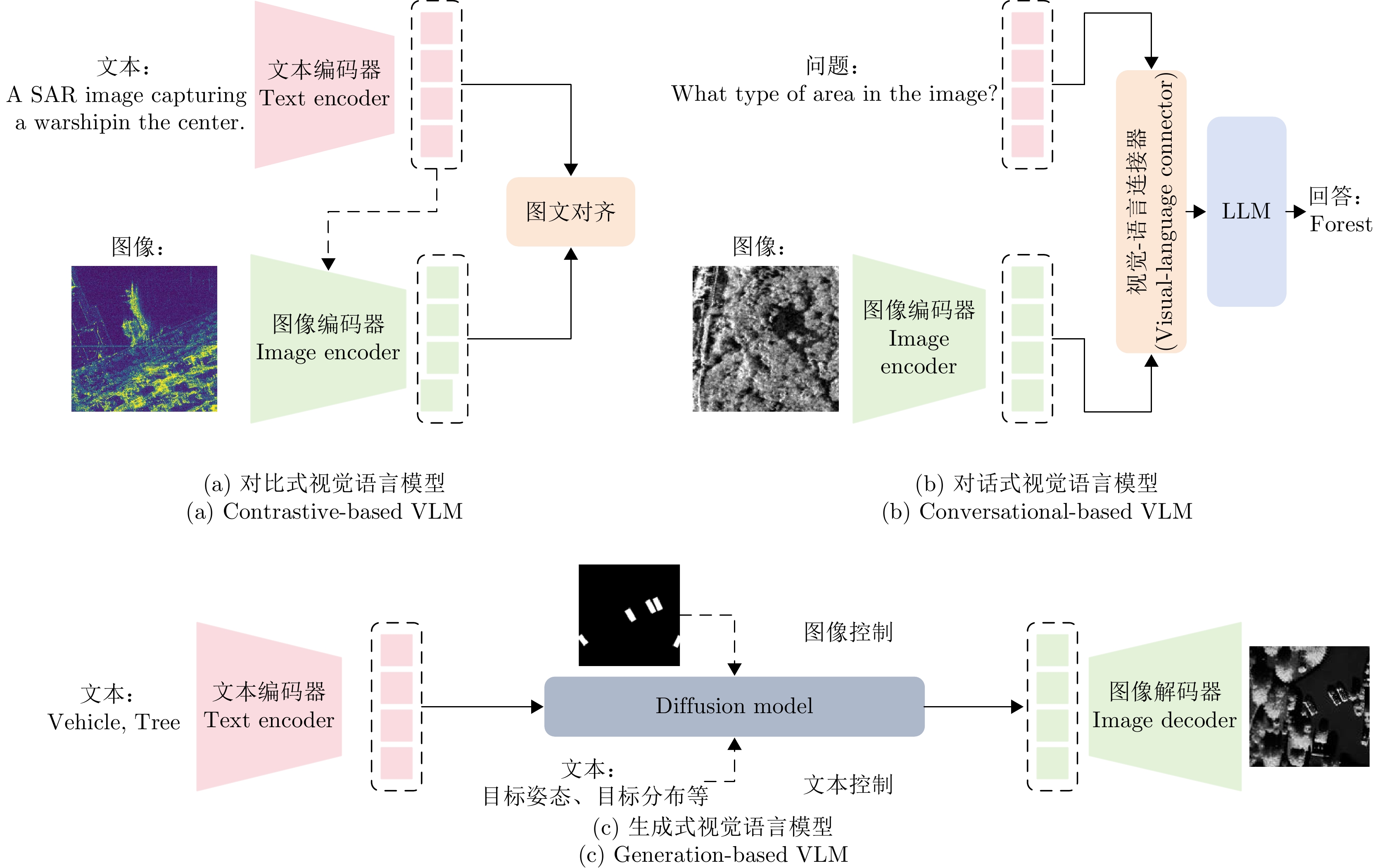
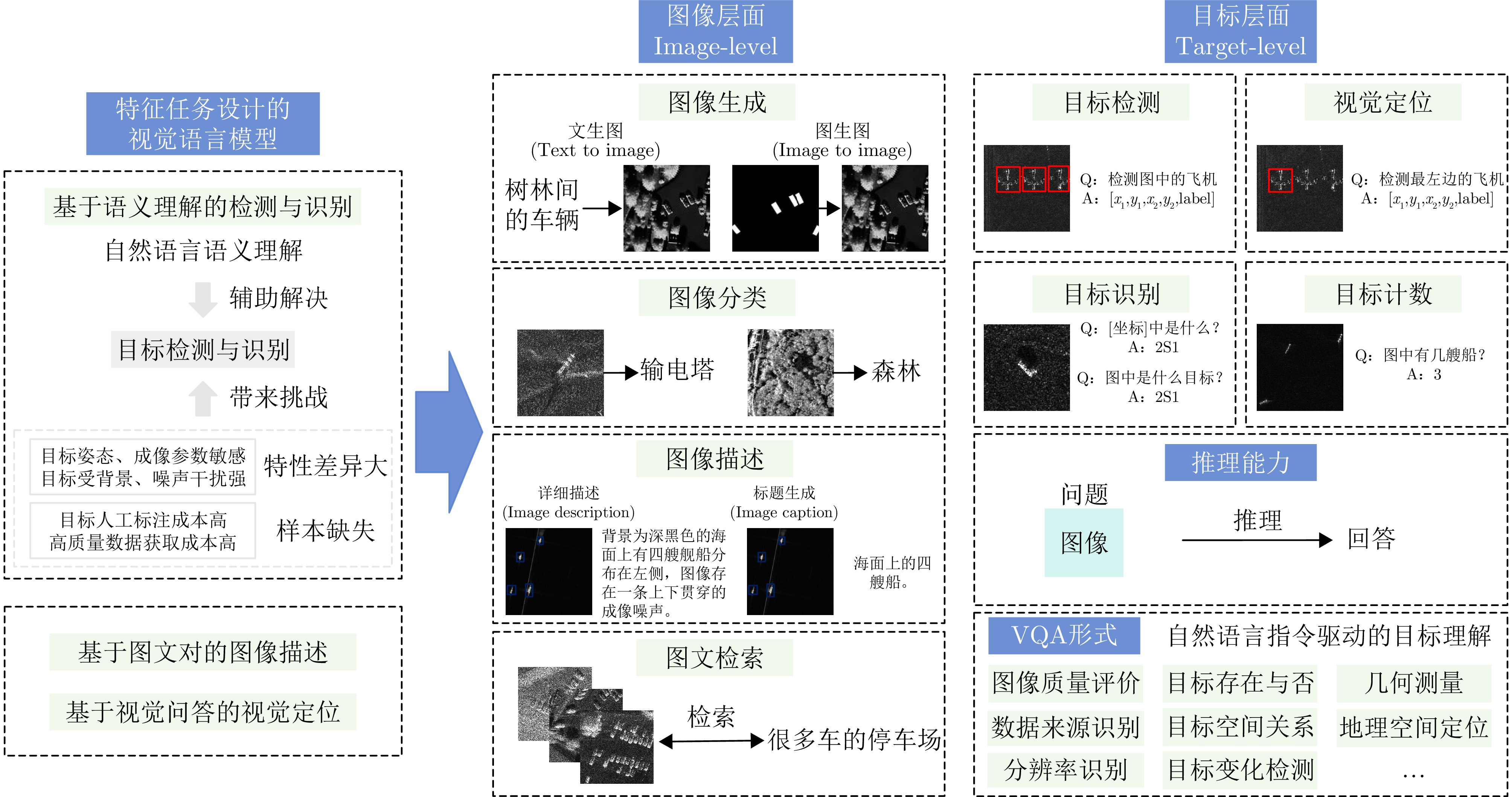
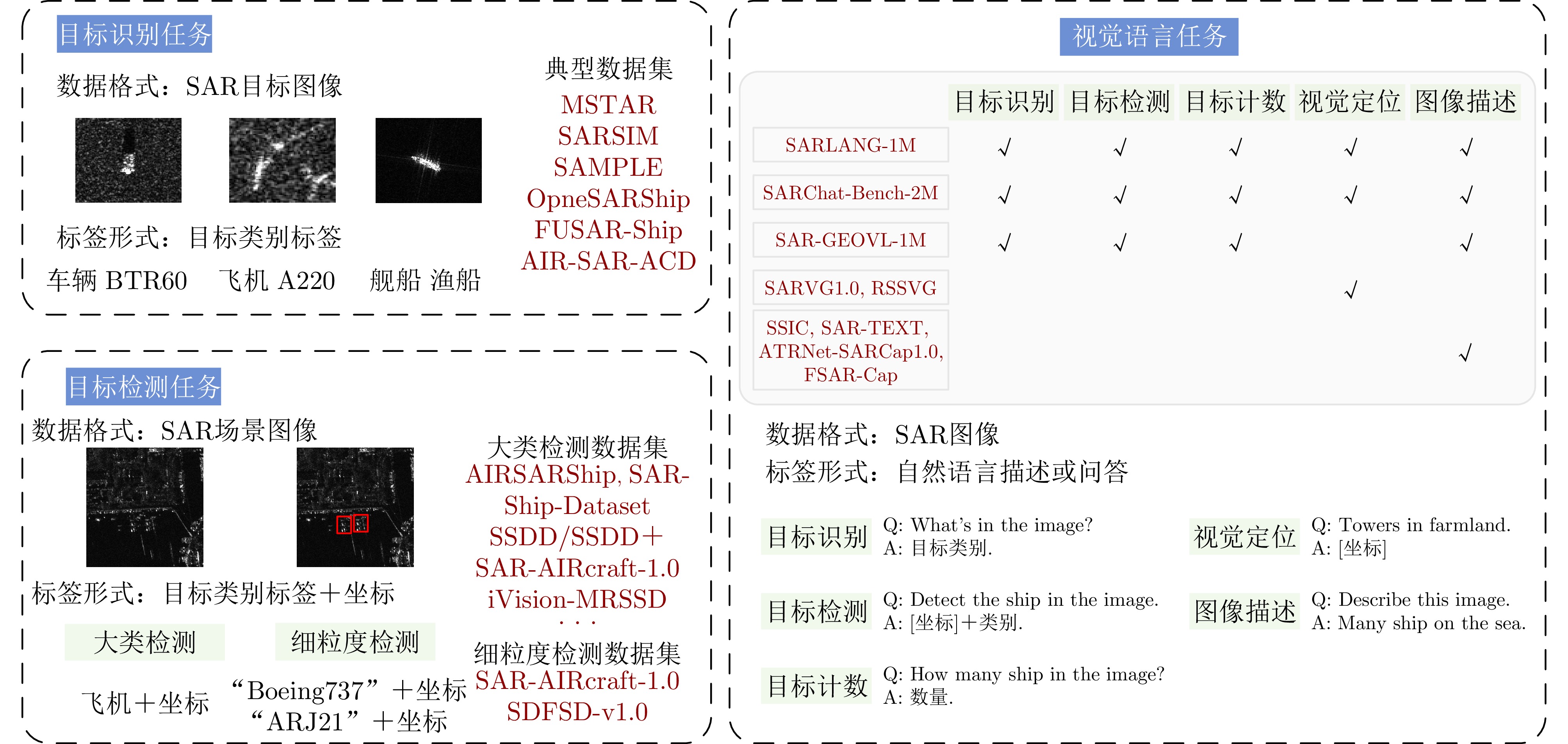
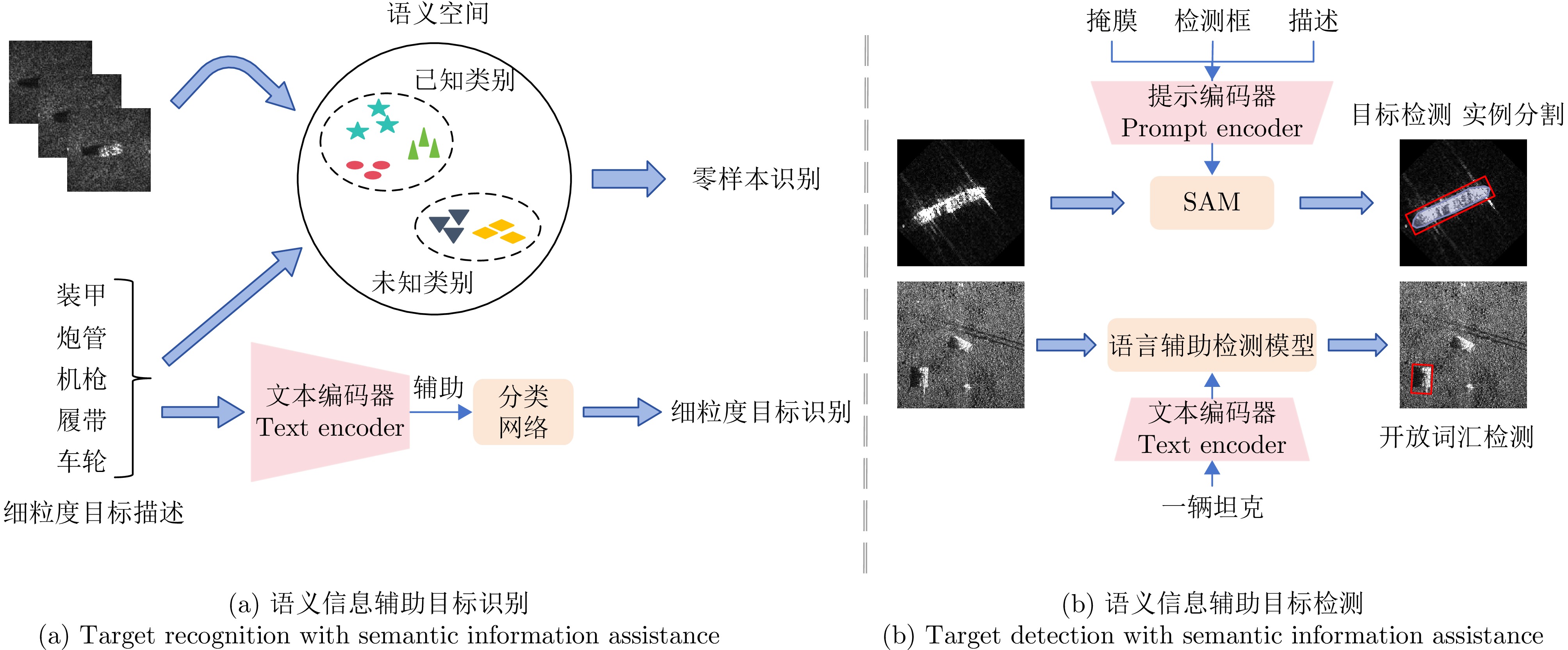
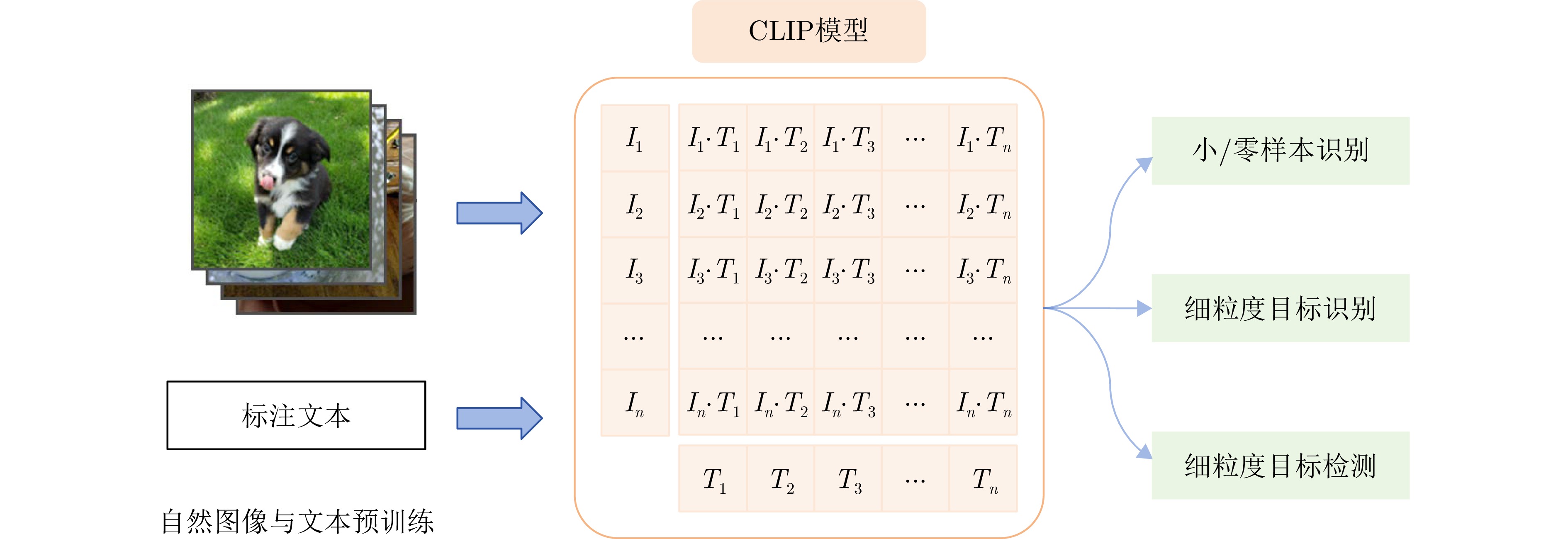
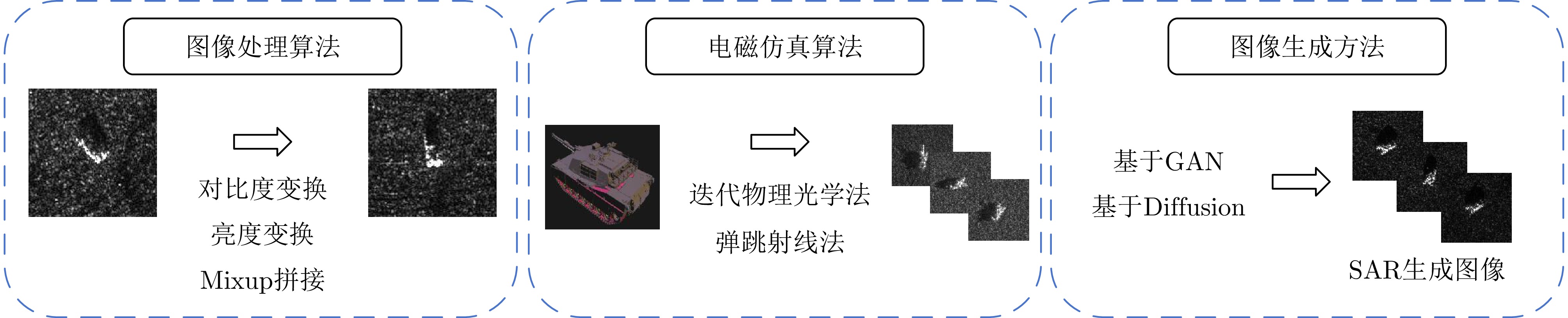
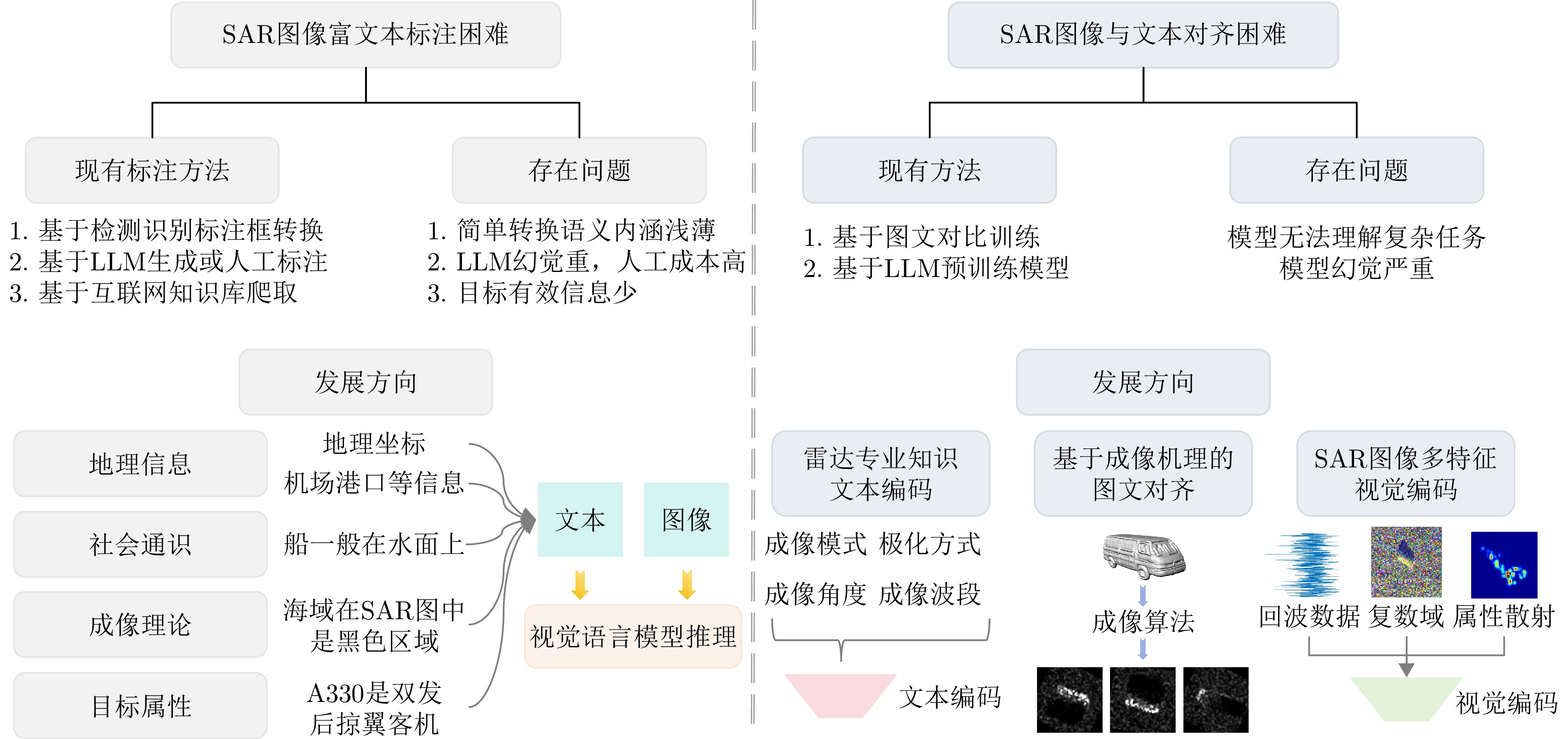
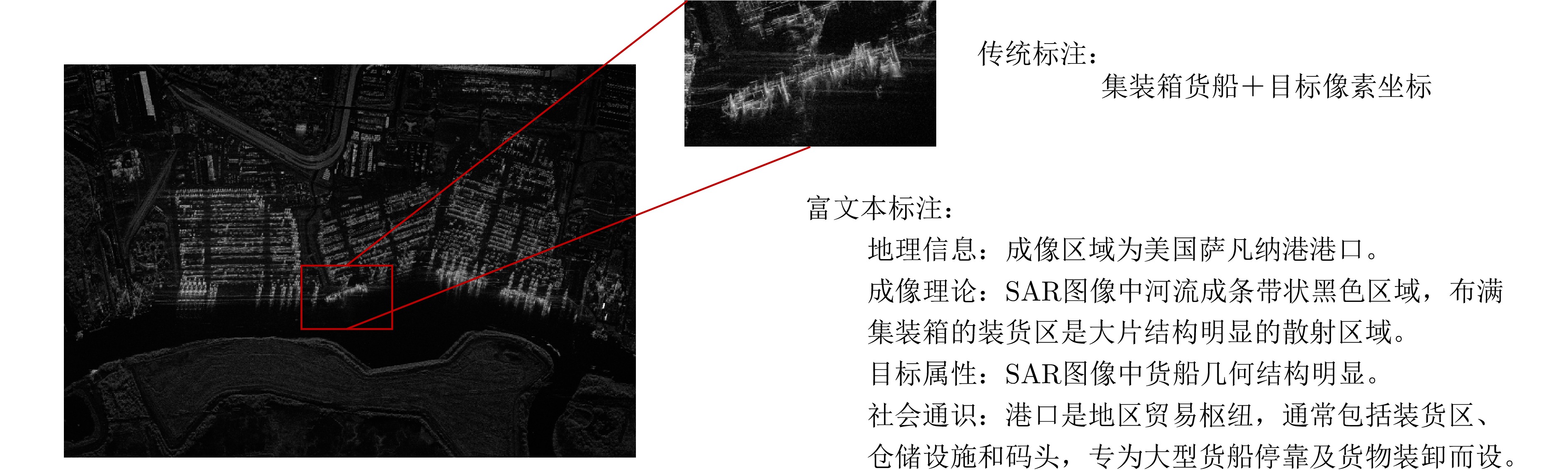
Synthetic Aperture Radar (SAR) is widely used in military and civilian applications, with intelligent target interpretation of SAR images being a crucial component of SAR applications. Vision-Language Models (VLMs) play an important role in SAR target interpretation. By incorporating natural language understanding, VLMs effectively address the challenges posed by large intraclass variability in target characteristics and the scarcity of high-quality labeled samples, thereby advancing the field from purely visual interpretation toward semantic understanding of targets. Drawing upon our team’s extensive research experience in SAR target interpretation theory, algorithms, and applications, this paper provides a comprehensive review of intelligent SAR target interpretation based on VLMs. We provide an in-depth analysis of existing challenges and tasks, summarize the current state of research, and compile available open-source datasets. Furthermore, we systematically outline the evolution, ranging from task-specific VLMs to contrastive-, conversational-, and generative-based VLMs and foundational models. Finally, we discuss the latest challenges and future outlooks in SAR target interpretation by VLMs.
Synthetic Aperture Radar (SAR) is widely used in military and civilian applications, with intelligent target interpretation of SAR images being a crucial component of SAR applications. Vision-Language Models (VLMs) play an important role in SAR target interpretation. By incorporating natural language understanding, VLMs effectively address the challenges posed by large intraclass variability in target characteristics and the scarcity of high-quality labeled samples, thereby advancing the field from purely visual interpretation toward semantic understanding of targets. Drawing upon our team’s extensive research experience in SAR target interpretation theory, algorithms, and applications, this paper provides a comprehensive review of intelligent SAR target interpretation based on VLMs. We provide an in-depth analysis of existing challenges and tasks, summarize the current state of research, and compile available open-source datasets. Furthermore, we systematically outline the evolution, ranging from task-specific VLMs to contrastive-, conversational-, and generative-based VLMs and foundational models. Finally, we discuss the latest challenges and future outlooks in SAR target interpretation by VLMs.


2026,
15(2):
441-462.
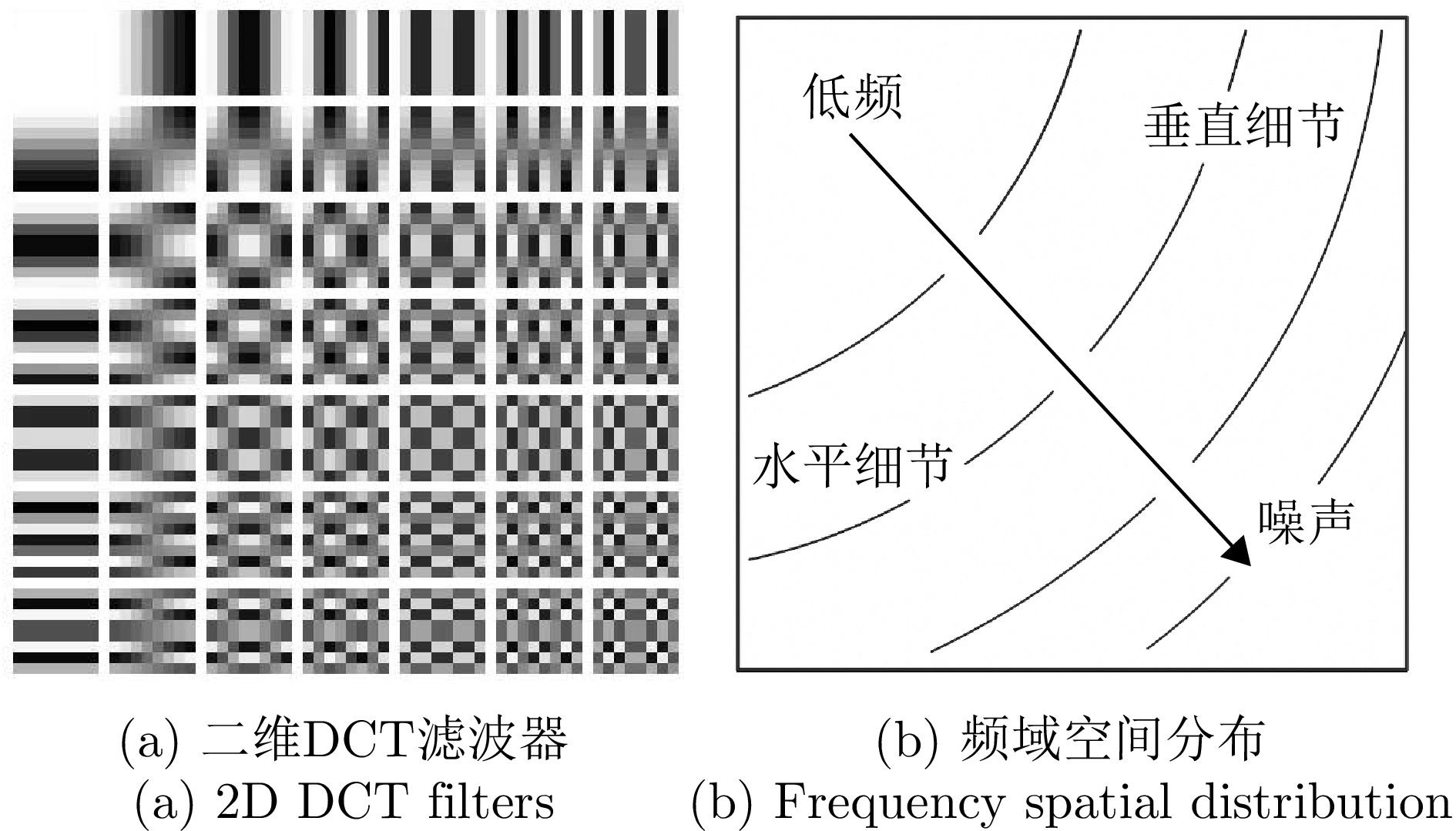
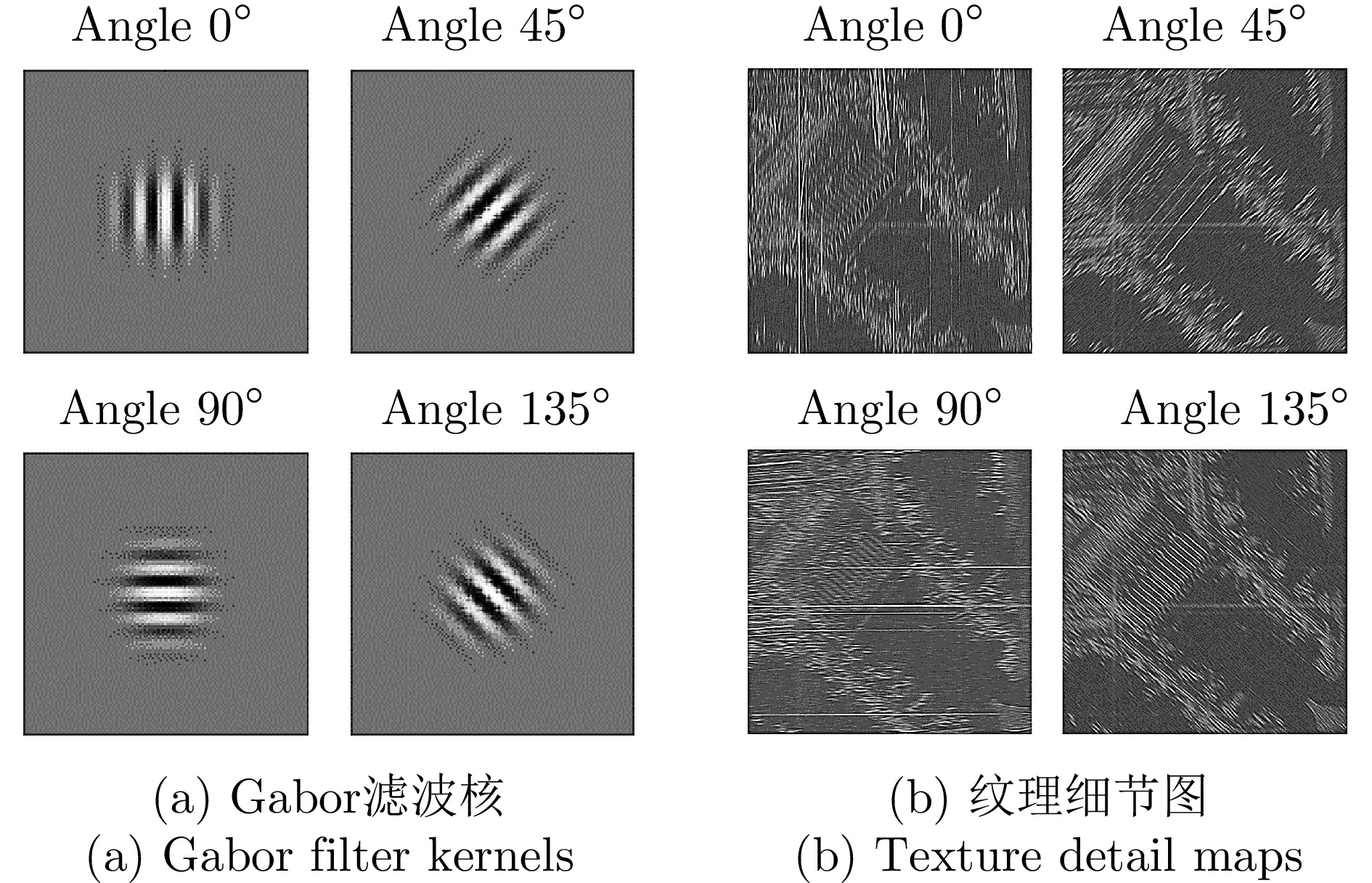
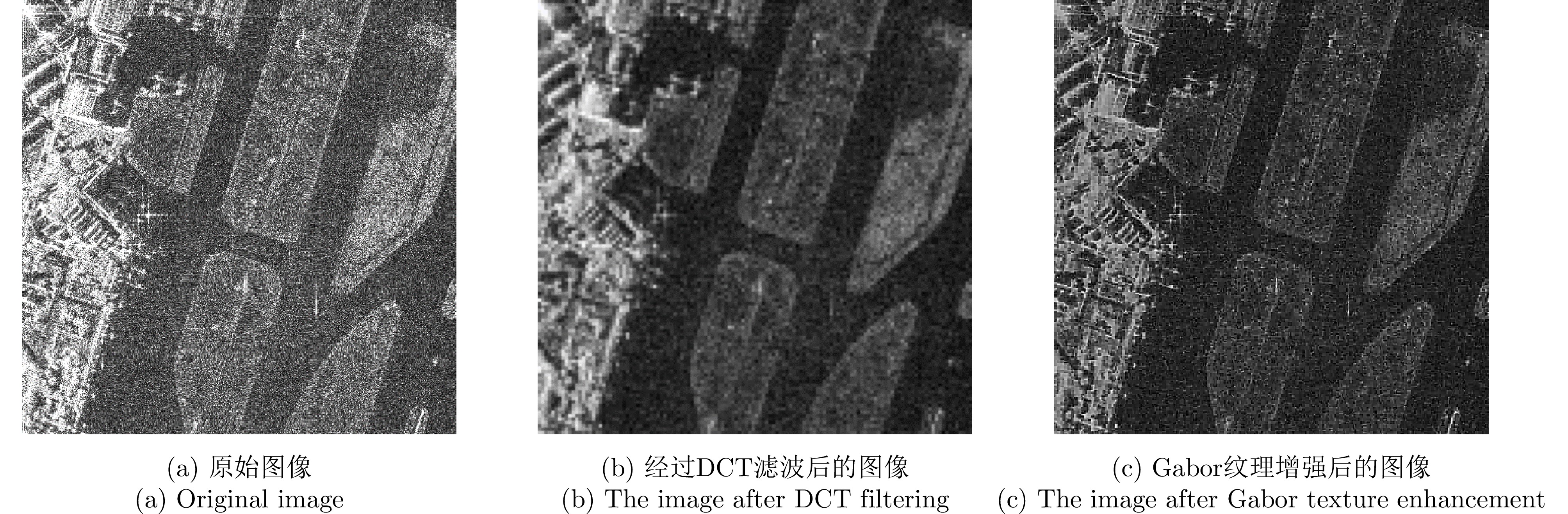
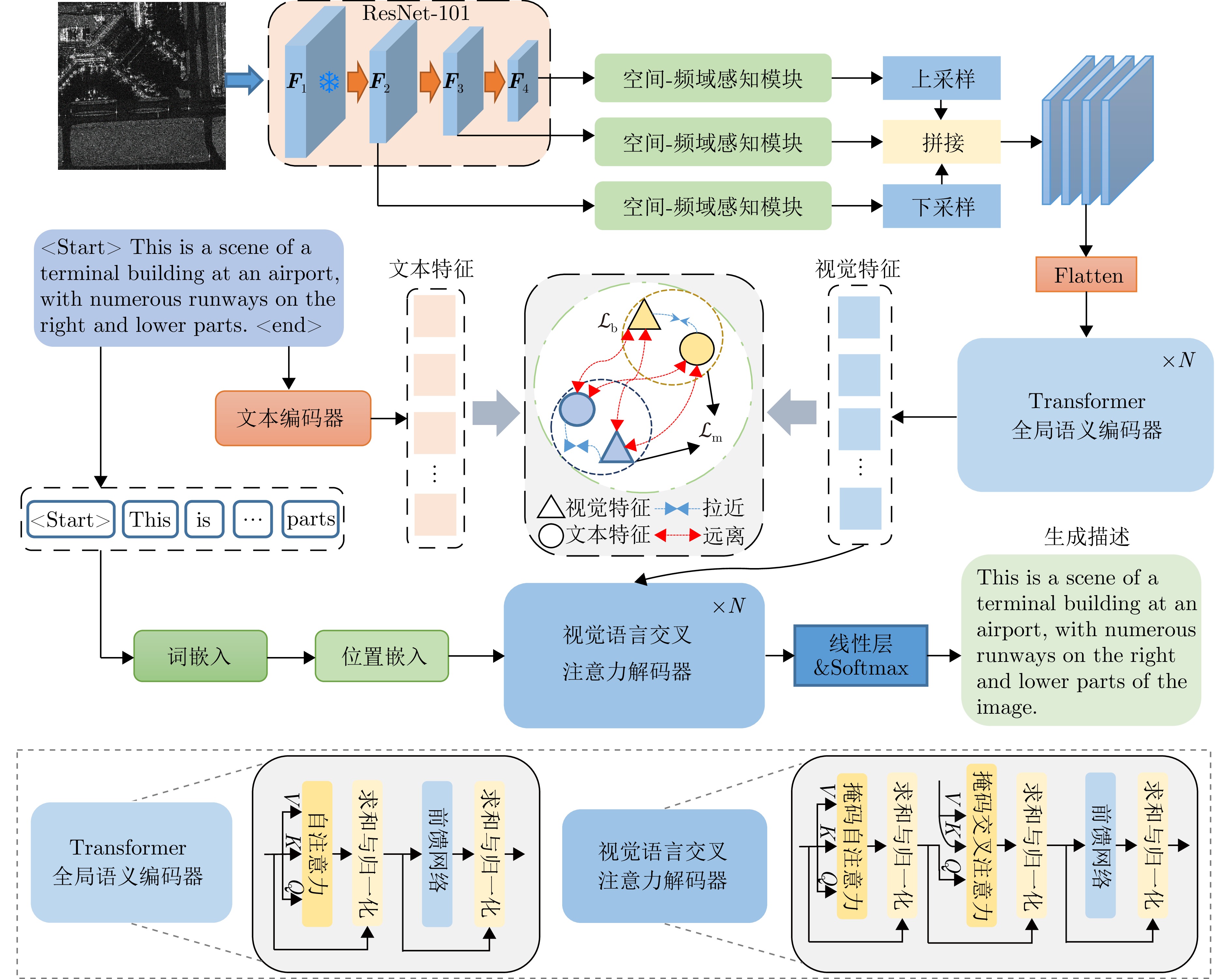
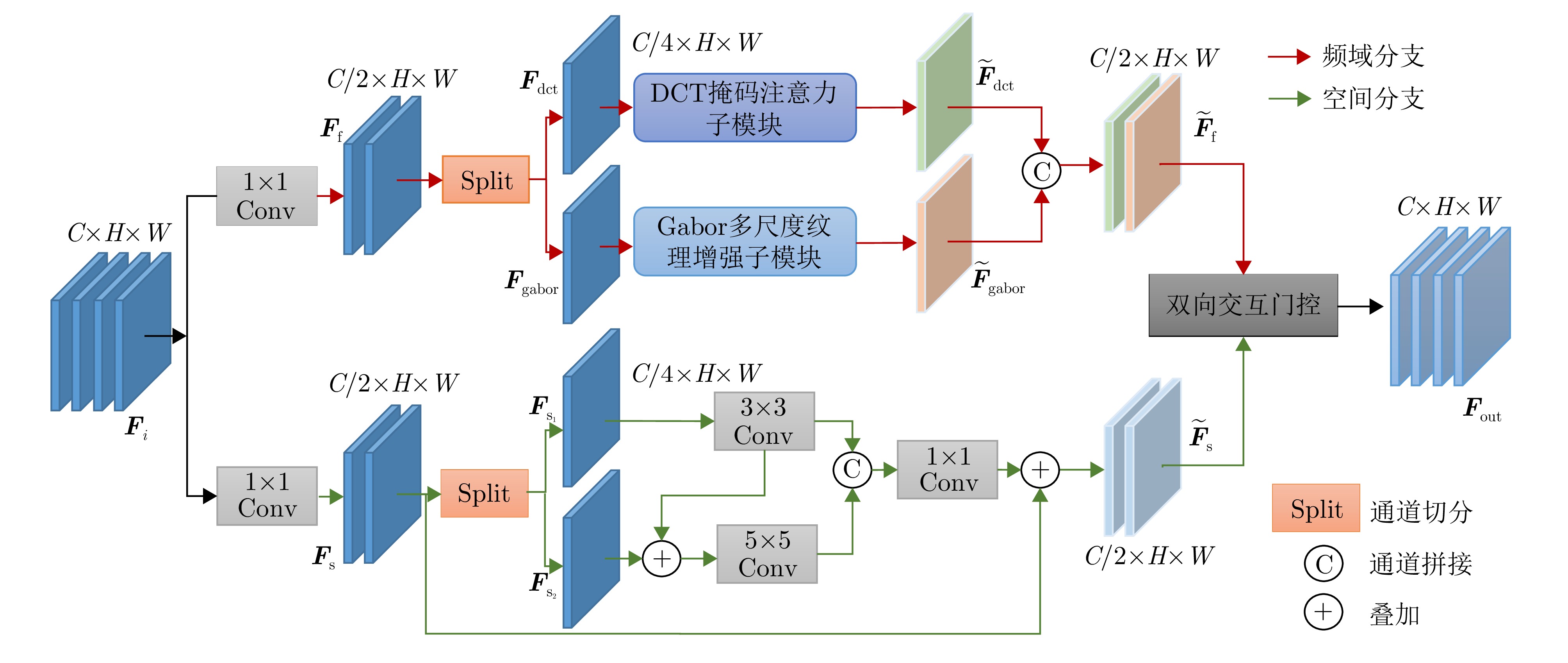
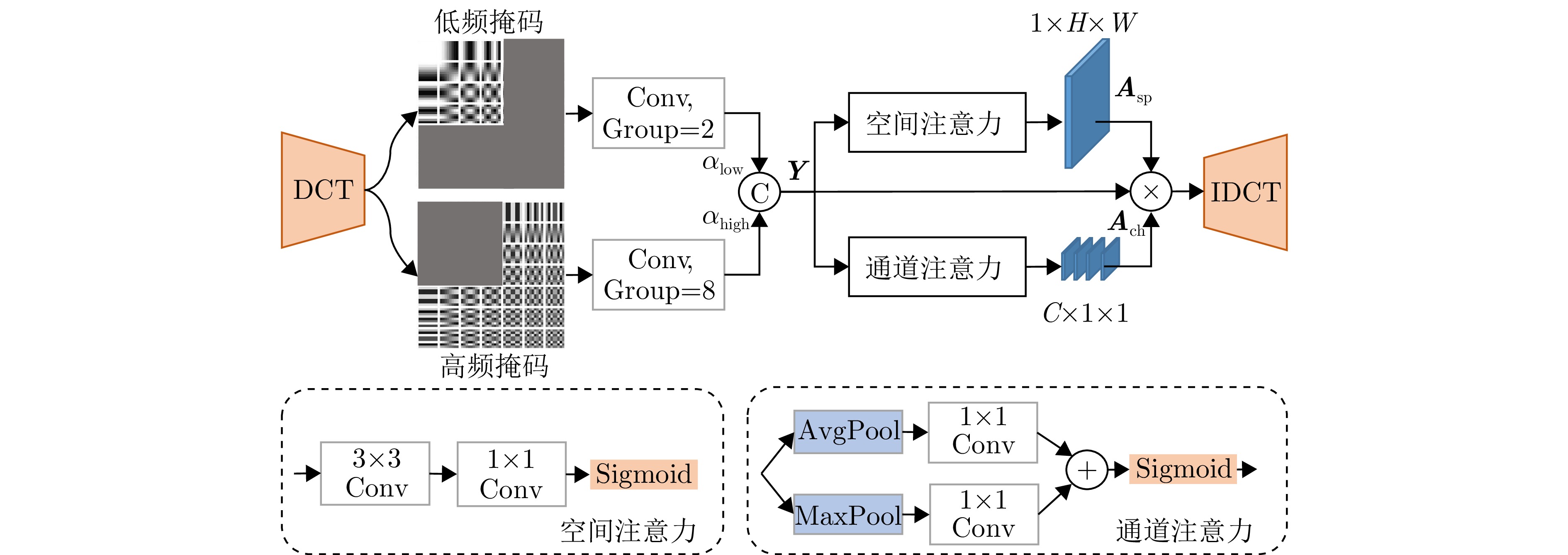
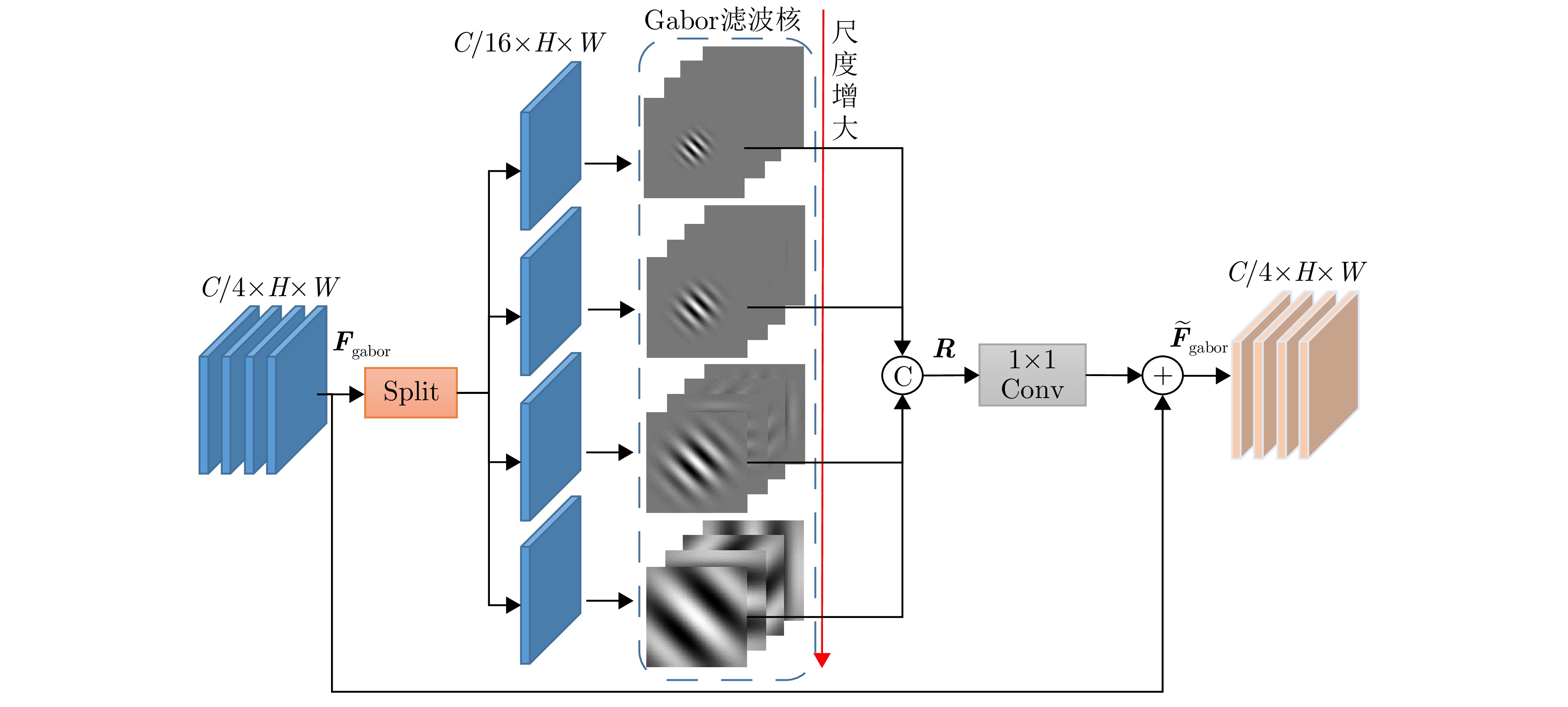
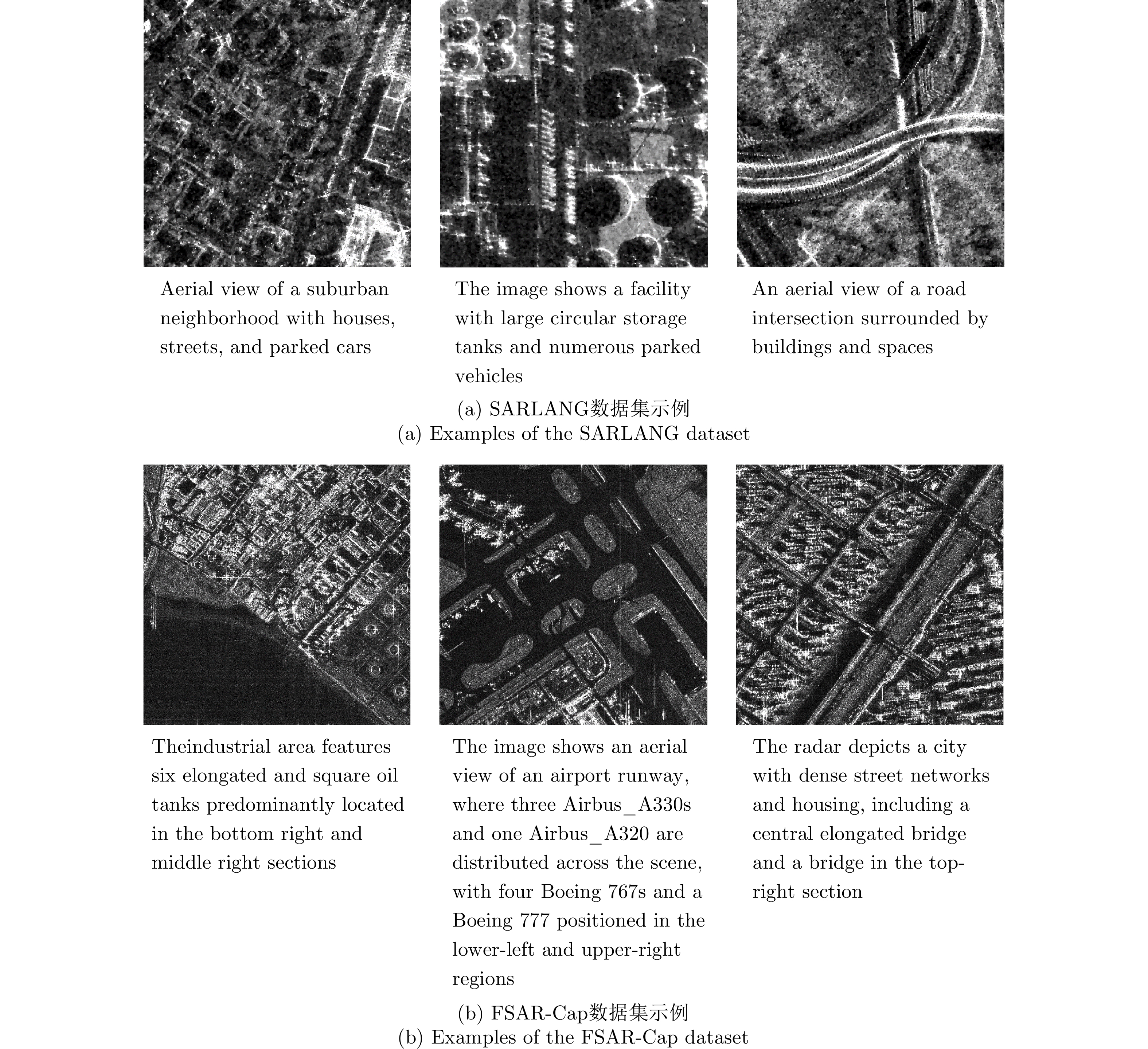
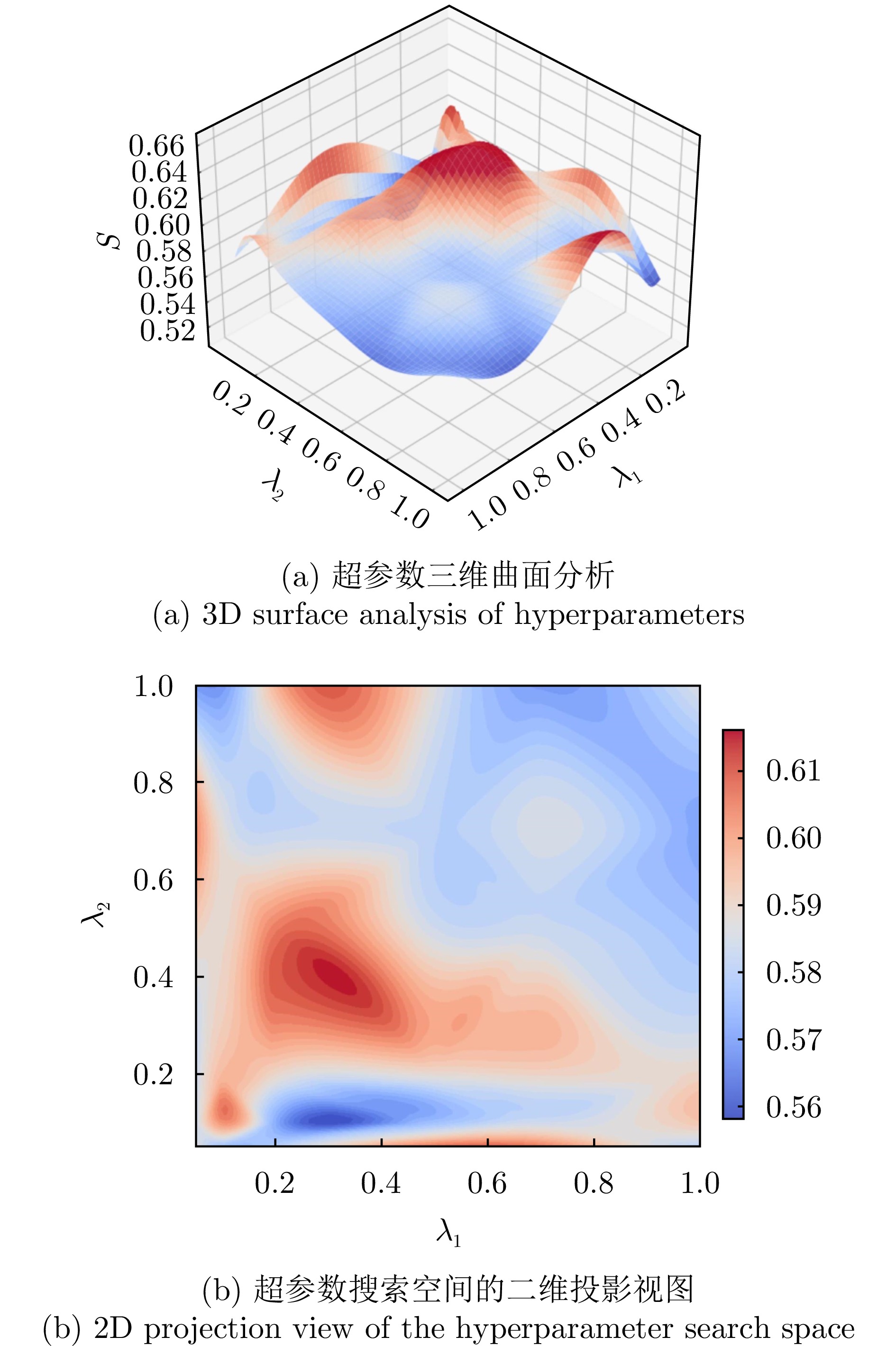
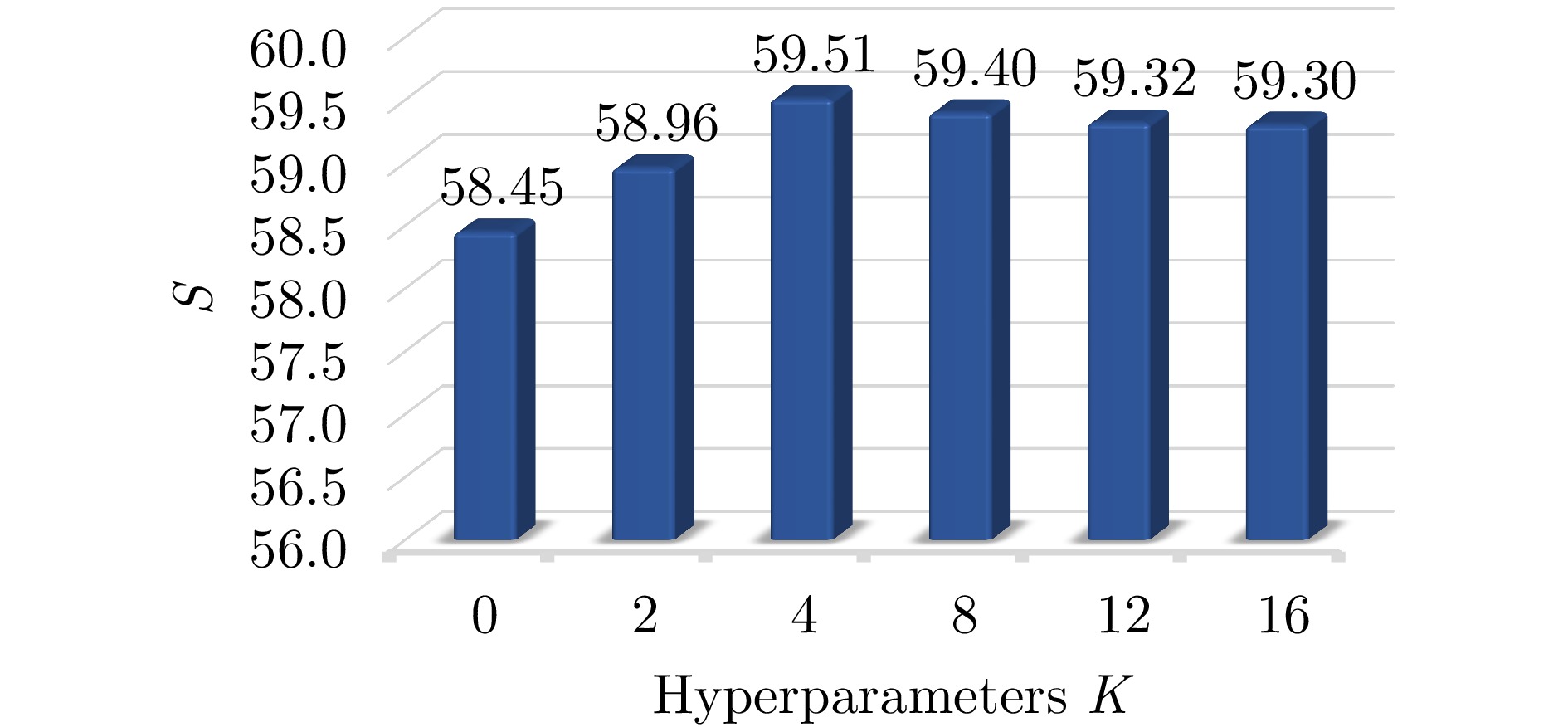
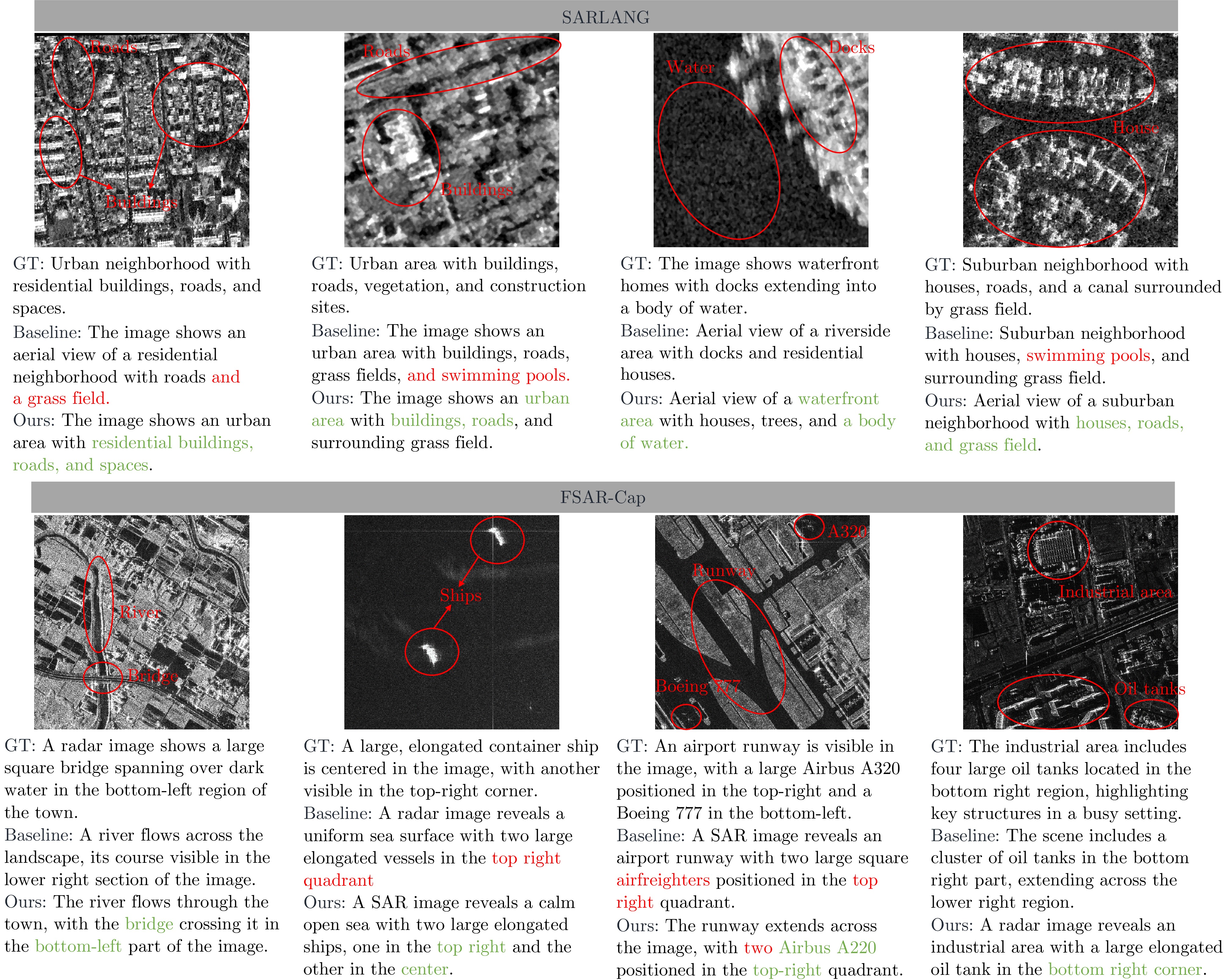
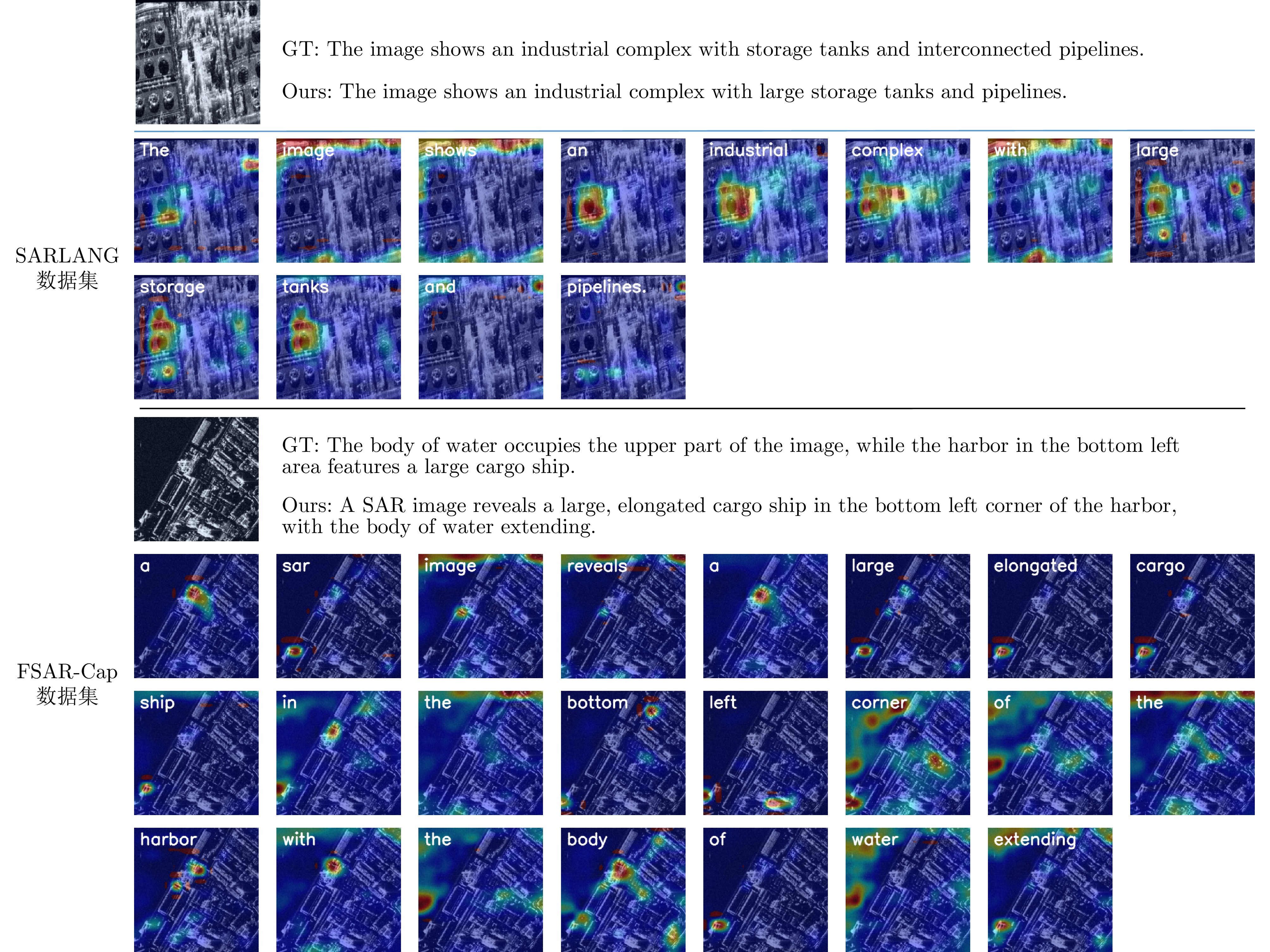
Synthetic Aperture Radar (SAR), as an active microwave remote sensing system, offers all-weather, all-day observation capabilities and has considerable application value in disaster monitoring, urban management, and military reconnaissance. Although deep learning techniques have achieved remarkable progress in interpreting SAR images, existing methods for target recognition and detection primarily focus on local feature extraction and single-target discrimination. They struggle to comprehensively characterize the global semantic structure and multitarget relationships in complex scenes, and the interpretation process remains highly dependent on human expertise with limited automation. SAR image captioning aims to translate visual information into natural language, serving as a key technology to bridge the gap between “perceiving targets” and “cognizing scenes,” which is of great importance for enhancing the automation and intelligence of SAR image interpretation. However, the inherent speckle noise, the scarcity of textural details, and the substantial semantic gap in SAR images further exacerbate the difficulty of cross-modal understanding. To address these challenges, this paper proposes a spatial-frequency aware model for SAR image captioning. First, a spatial-frequency aware module is constructed. It employs a Discrete Cosine Transform (DCT) mask attention mechanism to reweight spectral components for noise suppression and structure enhancement, combined with a Gabor multiscale texture enhancement submodule to improve sensitivity to directional and edge details. Second, a cross-modal semantic enhancement loss function is designed to bridge the semantic gap between visual features and natural language through bidirectional image-text alignment and mutual information maximization. Furthermore, a large-scale fine-grained SAR image captioning dataset, FSAR-Cap, containing 72400 high-quality image-text pairs, is constructed. The experimental results demonstrate that the proposed method achieves CIDEr scores of 151.00 and 95.14 on the SARLANG and FSAR-Cap datasets, respectively. Qualitatively, the model effectively suppresses hallucinations and accurately captures fine-grained spatial-textural details, considerably outperforming mainstream methods.
Synthetic Aperture Radar (SAR), as an active microwave remote sensing system, offers all-weather, all-day observation capabilities and has considerable application value in disaster monitoring, urban management, and military reconnaissance. Although deep learning techniques have achieved remarkable progress in interpreting SAR images, existing methods for target recognition and detection primarily focus on local feature extraction and single-target discrimination. They struggle to comprehensively characterize the global semantic structure and multitarget relationships in complex scenes, and the interpretation process remains highly dependent on human expertise with limited automation. SAR image captioning aims to translate visual information into natural language, serving as a key technology to bridge the gap between “perceiving targets” and “cognizing scenes,” which is of great importance for enhancing the automation and intelligence of SAR image interpretation. However, the inherent speckle noise, the scarcity of textural details, and the substantial semantic gap in SAR images further exacerbate the difficulty of cross-modal understanding. To address these challenges, this paper proposes a spatial-frequency aware model for SAR image captioning. First, a spatial-frequency aware module is constructed. It employs a Discrete Cosine Transform (DCT) mask attention mechanism to reweight spectral components for noise suppression and structure enhancement, combined with a Gabor multiscale texture enhancement submodule to improve sensitivity to directional and edge details. Second, a cross-modal semantic enhancement loss function is designed to bridge the semantic gap between visual features and natural language through bidirectional image-text alignment and mutual information maximization. Furthermore, a large-scale fine-grained SAR image captioning dataset, FSAR-Cap, containing 72400 high-quality image-text pairs, is constructed. The experimental results demonstrate that the proposed method achieves CIDEr scores of 151.00 and 95.14 on the SARLANG and FSAR-Cap datasets, respectively. Qualitatively, the model effectively suppresses hallucinations and accurately captures fine-grained spatial-textural details, considerably outperforming mainstream methods.

2026,
15(2):
463-478.
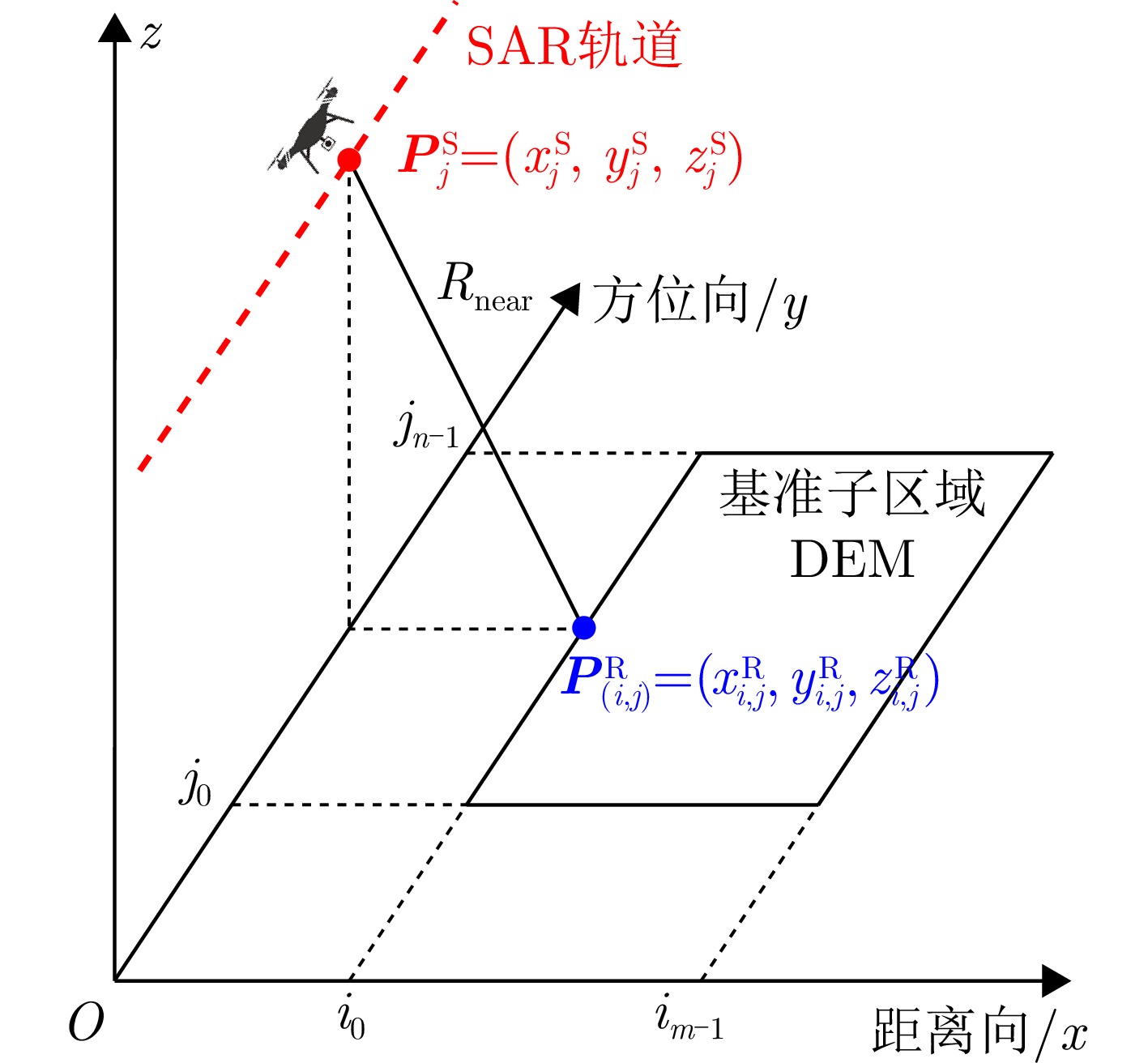
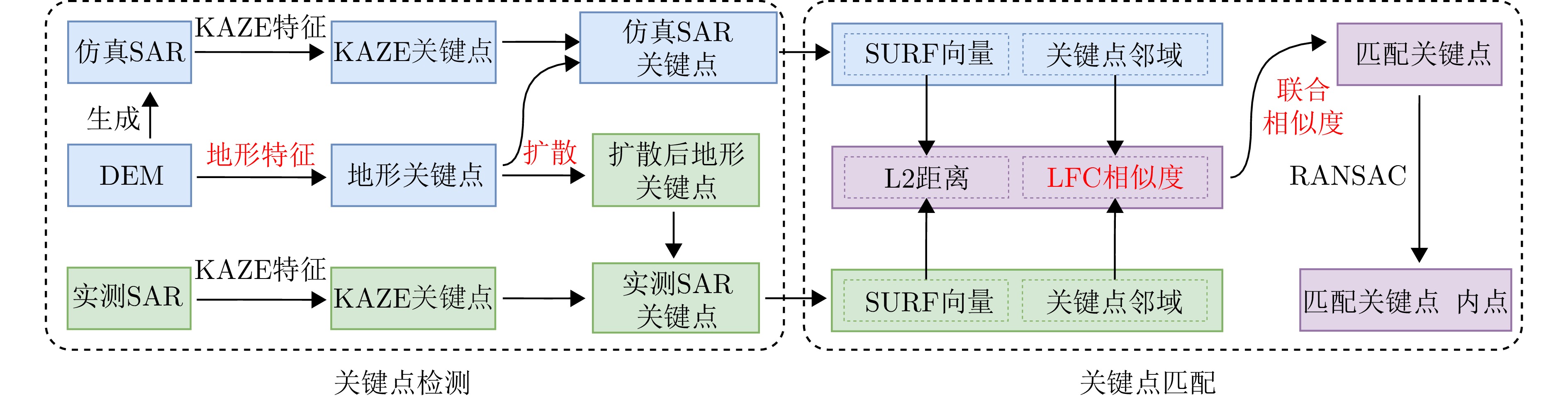
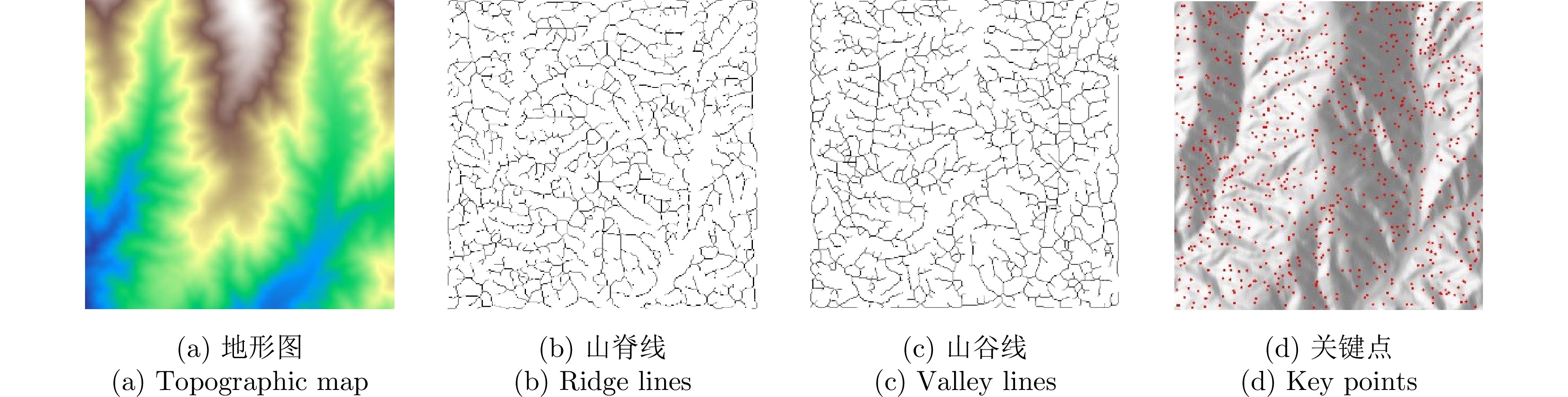
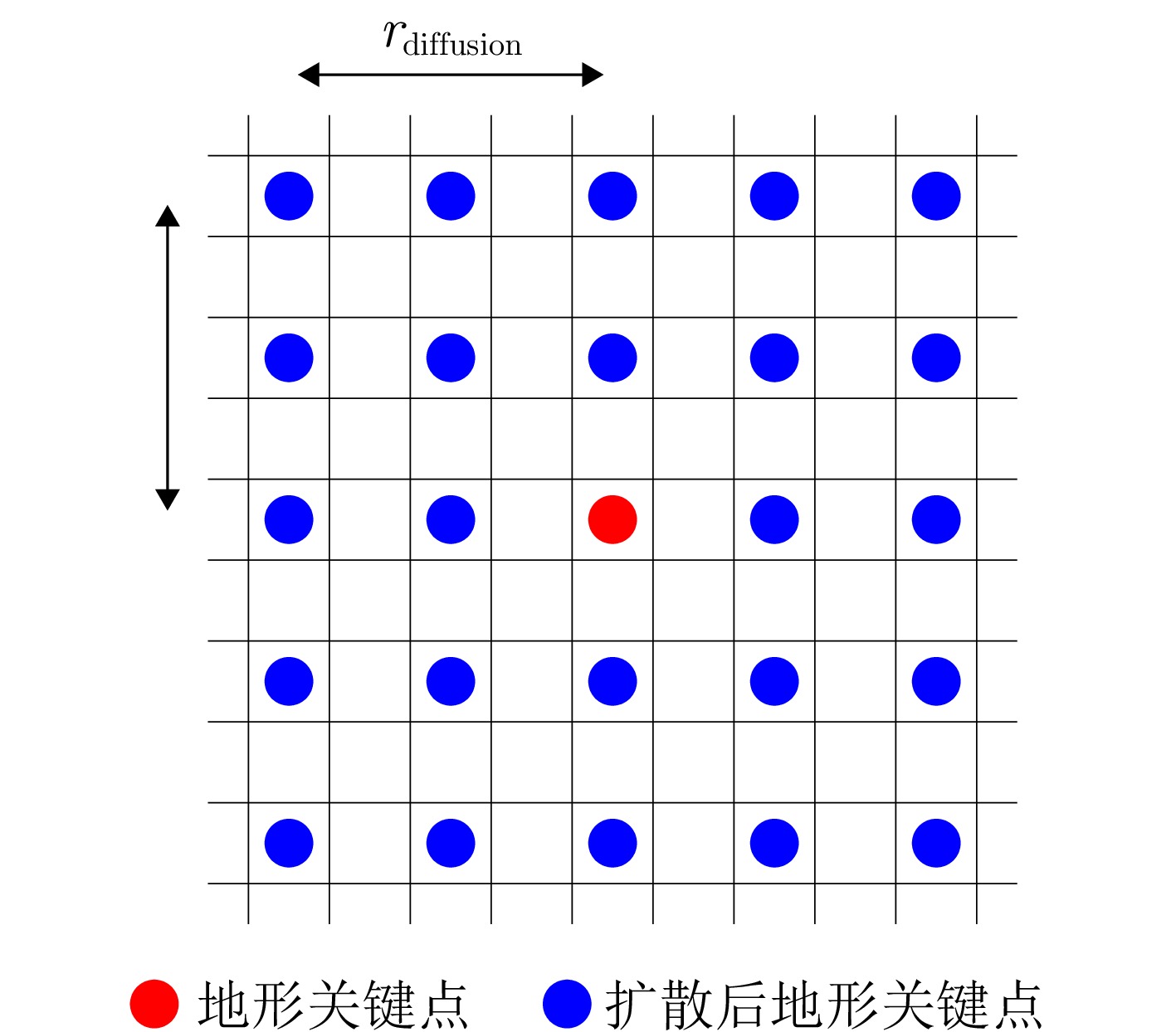
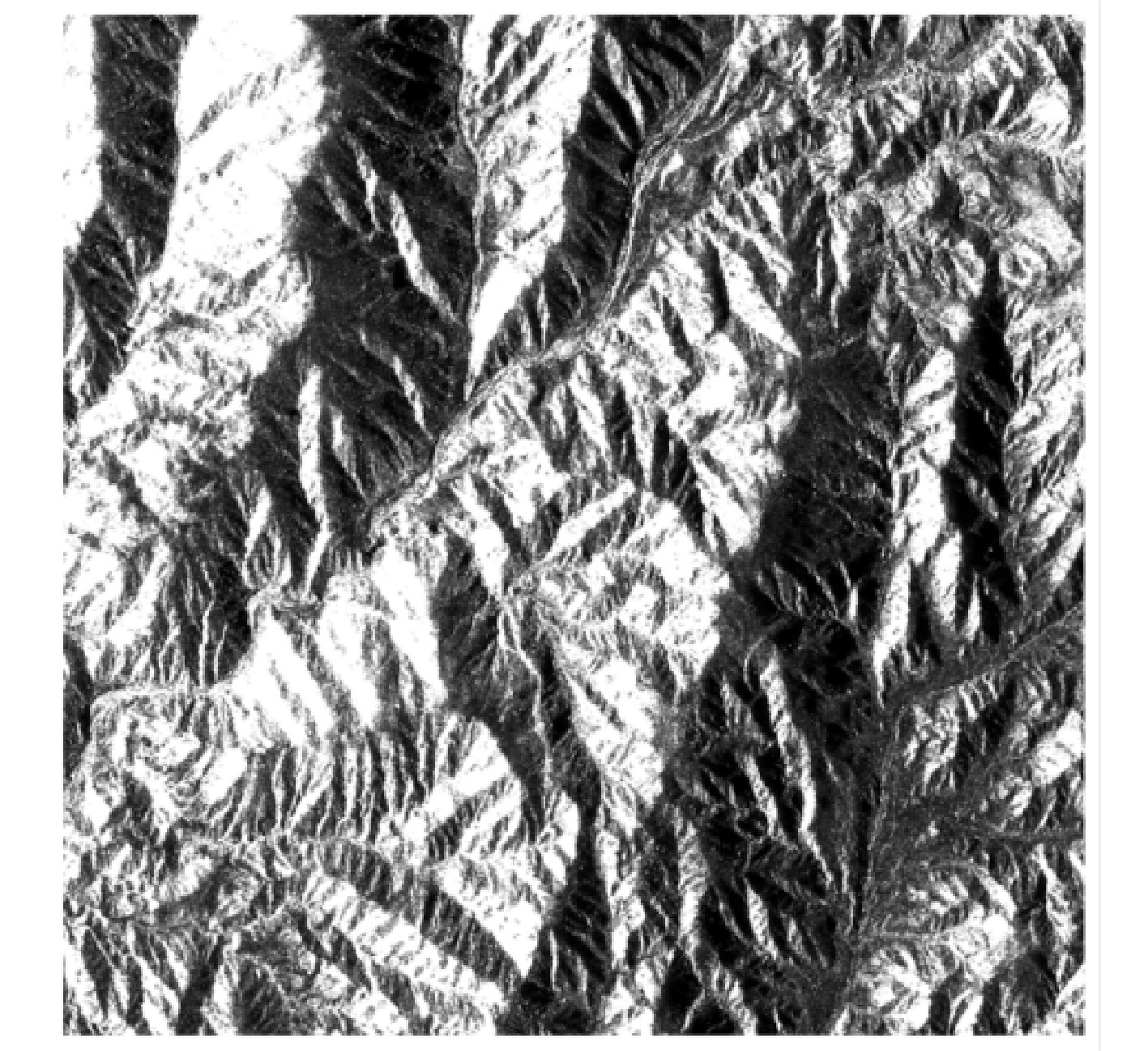
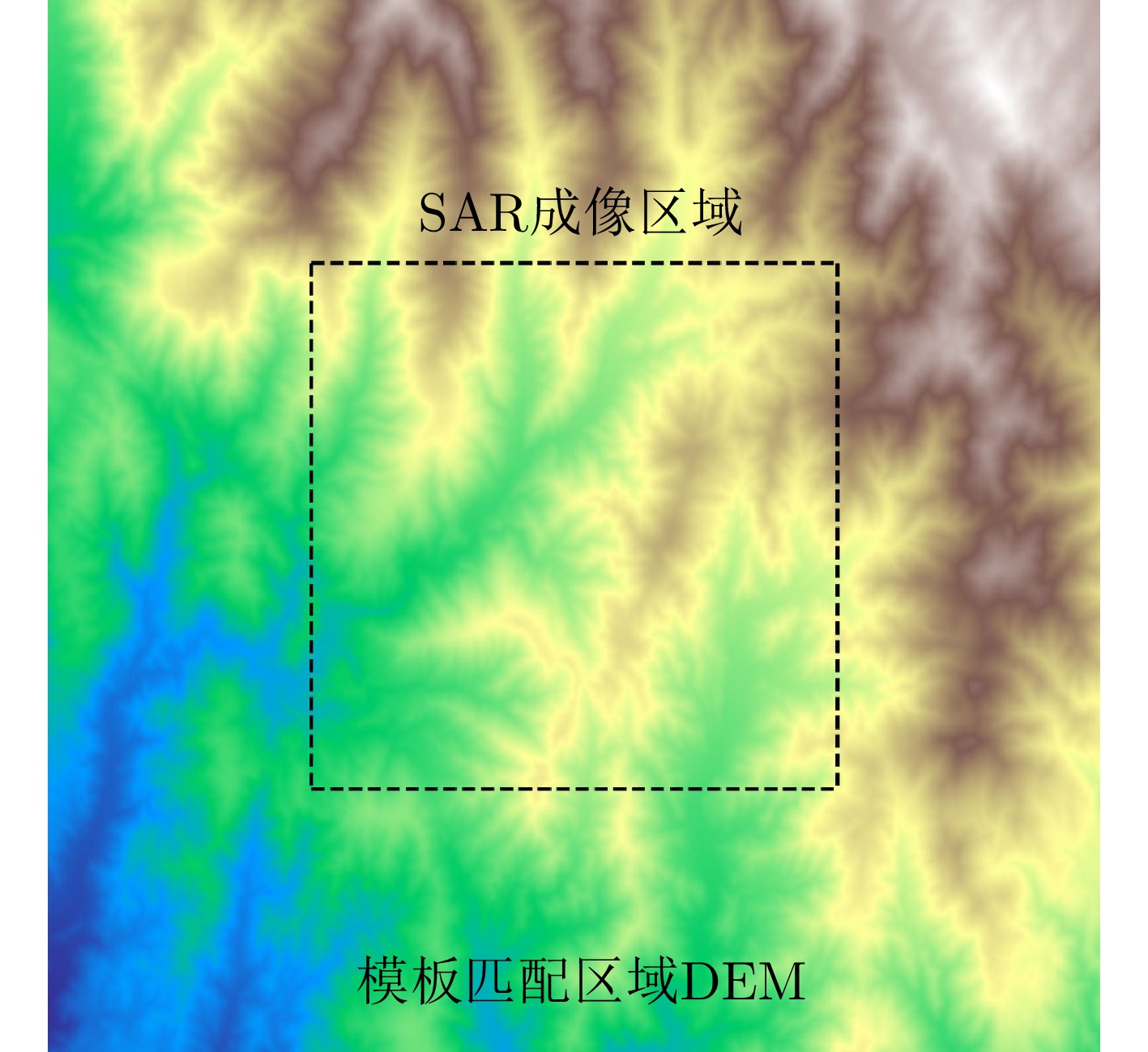
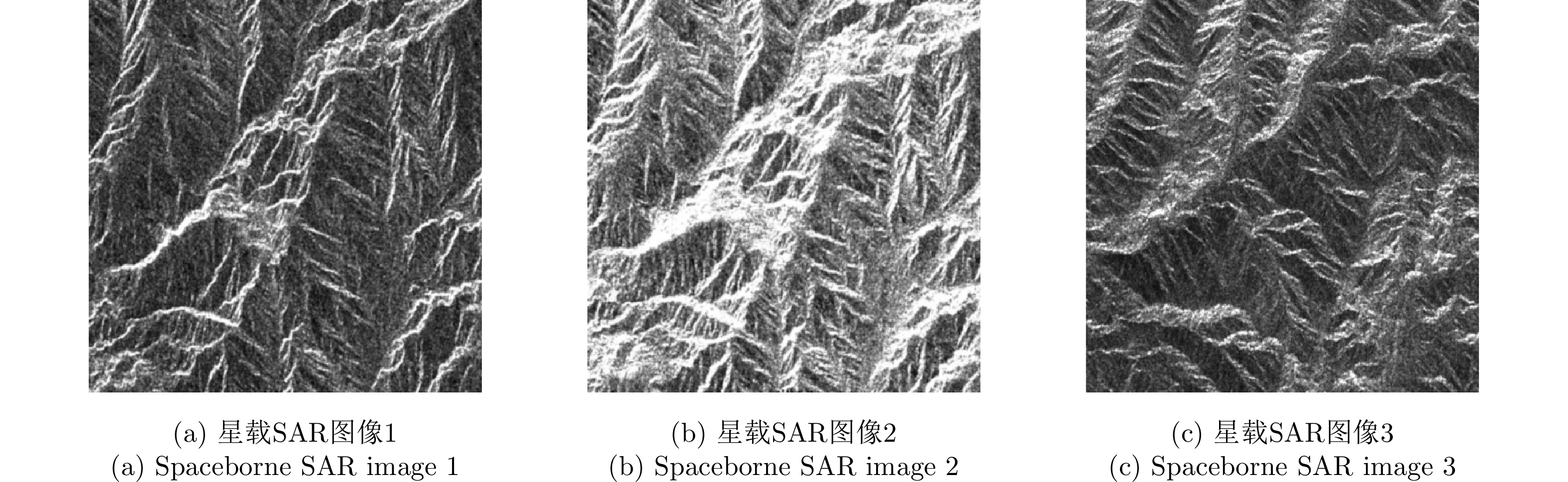
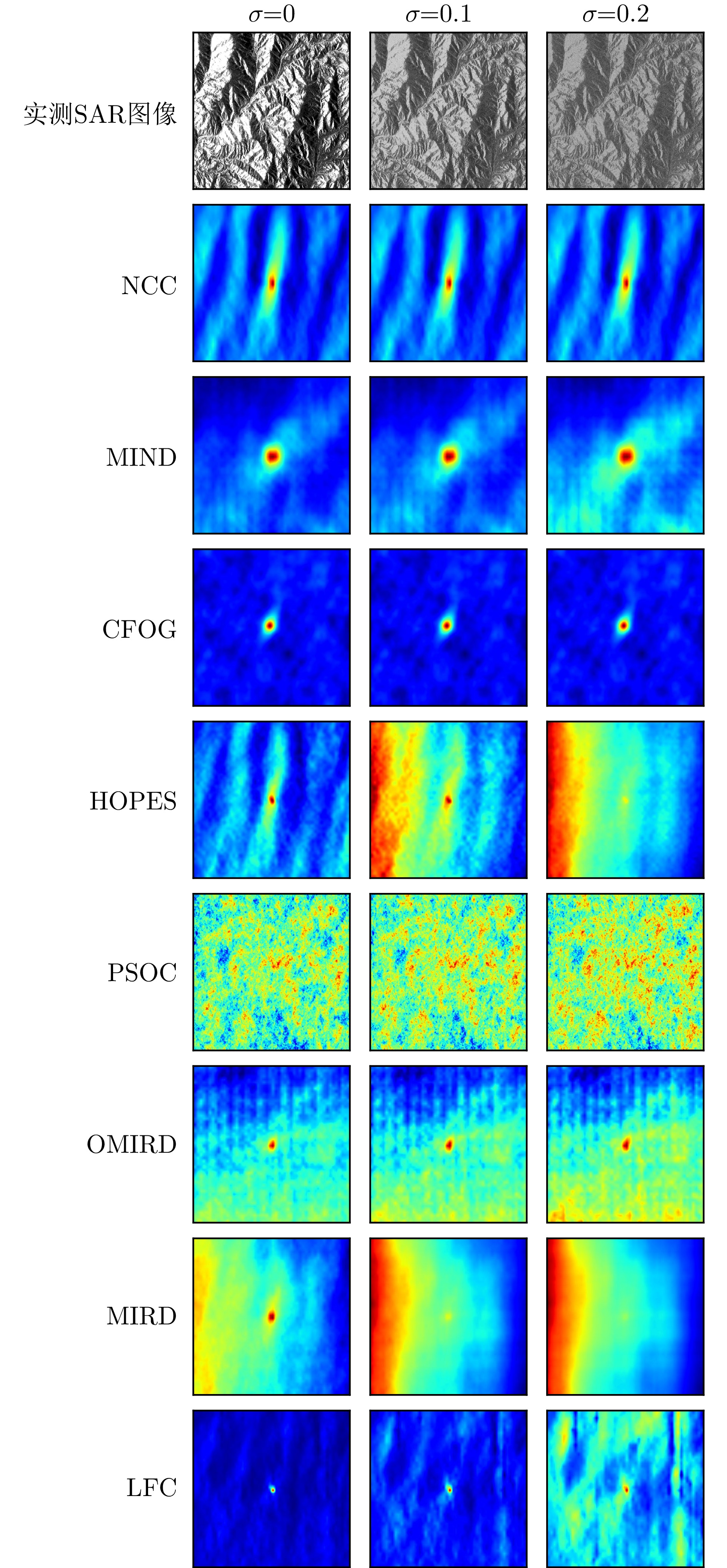
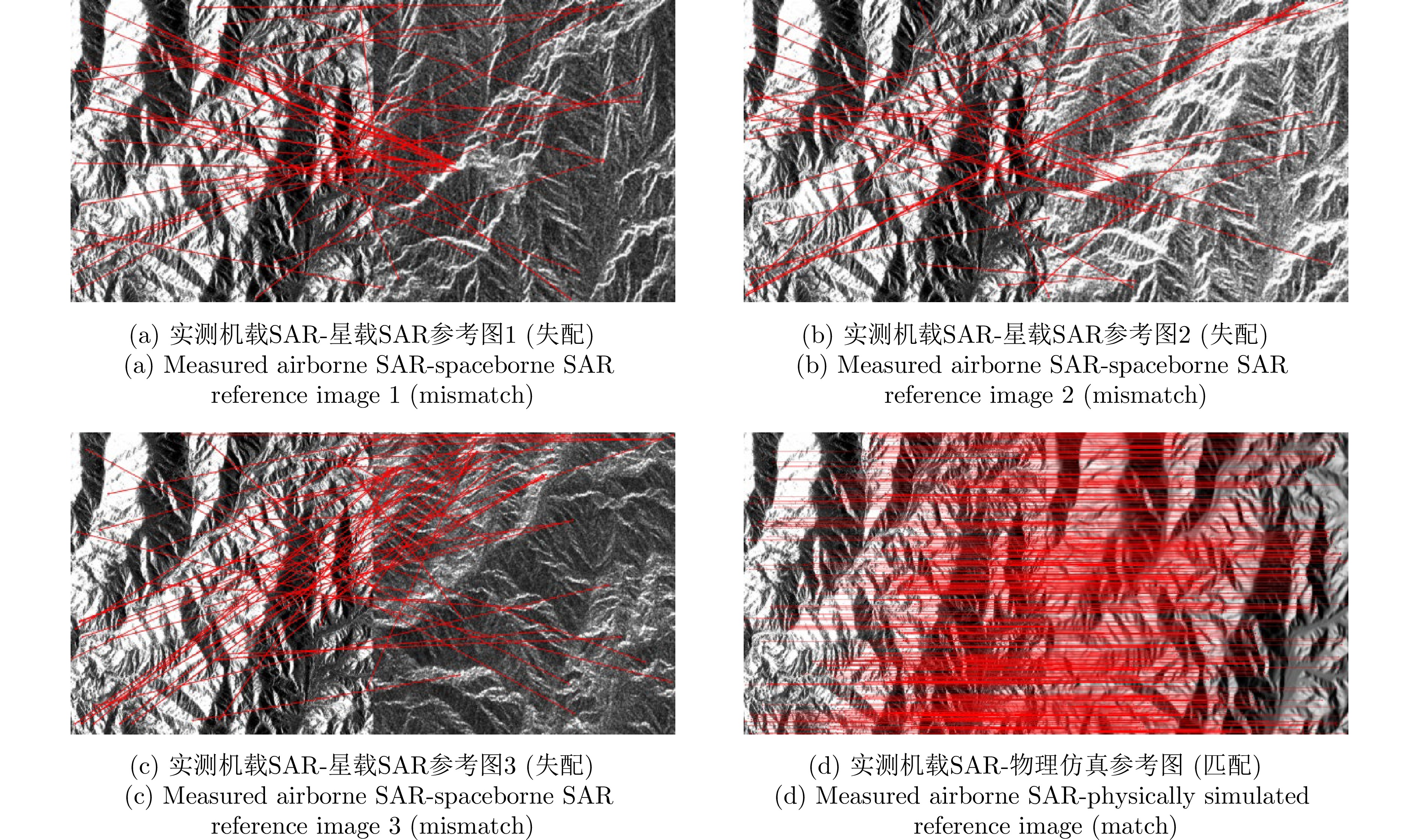
Variations in imaging geometry are the main cause of relative feature distortion in Synthetic Aperture Radar (SAR) images, greatly increasing the difficulty of image matching. Using simulated SAR images as references can remove the feature distortions caused by geometric differences. However, significant differences in scattering characteristics and noise patterns between measured and simulated images still exist. Additionally, since most existing matching algorithms mainly rely on symmetric keypoint detection and descriptor matching, the number and precision of matched points are not optimal. To solve these problems, this paper introduces an asymmetric Local Fitting Consistency (LFC) similarity metric based on the local statistical features of both measured and simulated SAR images. Using this metric, a coarse-to-fine matching framework for airborne and simulated SAR images is designed. Furthermore, terrain features are added to improve keypoint detection diversity, leading to more robust matching between airborne and simulated SAR images. Experimental results show that the proposed LFC-based matching method offers better robustness and accuracy compared to other approaches, significantly surpassing current state-of-the-art algorithms in terms of matching precision and other key metrics.
Variations in imaging geometry are the main cause of relative feature distortion in Synthetic Aperture Radar (SAR) images, greatly increasing the difficulty of image matching. Using simulated SAR images as references can remove the feature distortions caused by geometric differences. However, significant differences in scattering characteristics and noise patterns between measured and simulated images still exist. Additionally, since most existing matching algorithms mainly rely on symmetric keypoint detection and descriptor matching, the number and precision of matched points are not optimal. To solve these problems, this paper introduces an asymmetric Local Fitting Consistency (LFC) similarity metric based on the local statistical features of both measured and simulated SAR images. Using this metric, a coarse-to-fine matching framework for airborne and simulated SAR images is designed. Furthermore, terrain features are added to improve keypoint detection diversity, leading to more robust matching between airborne and simulated SAR images. Experimental results show that the proposed LFC-based matching method offers better robustness and accuracy compared to other approaches, significantly surpassing current state-of-the-art algorithms in terms of matching precision and other key metrics.

2026,
15(2):
479-502.
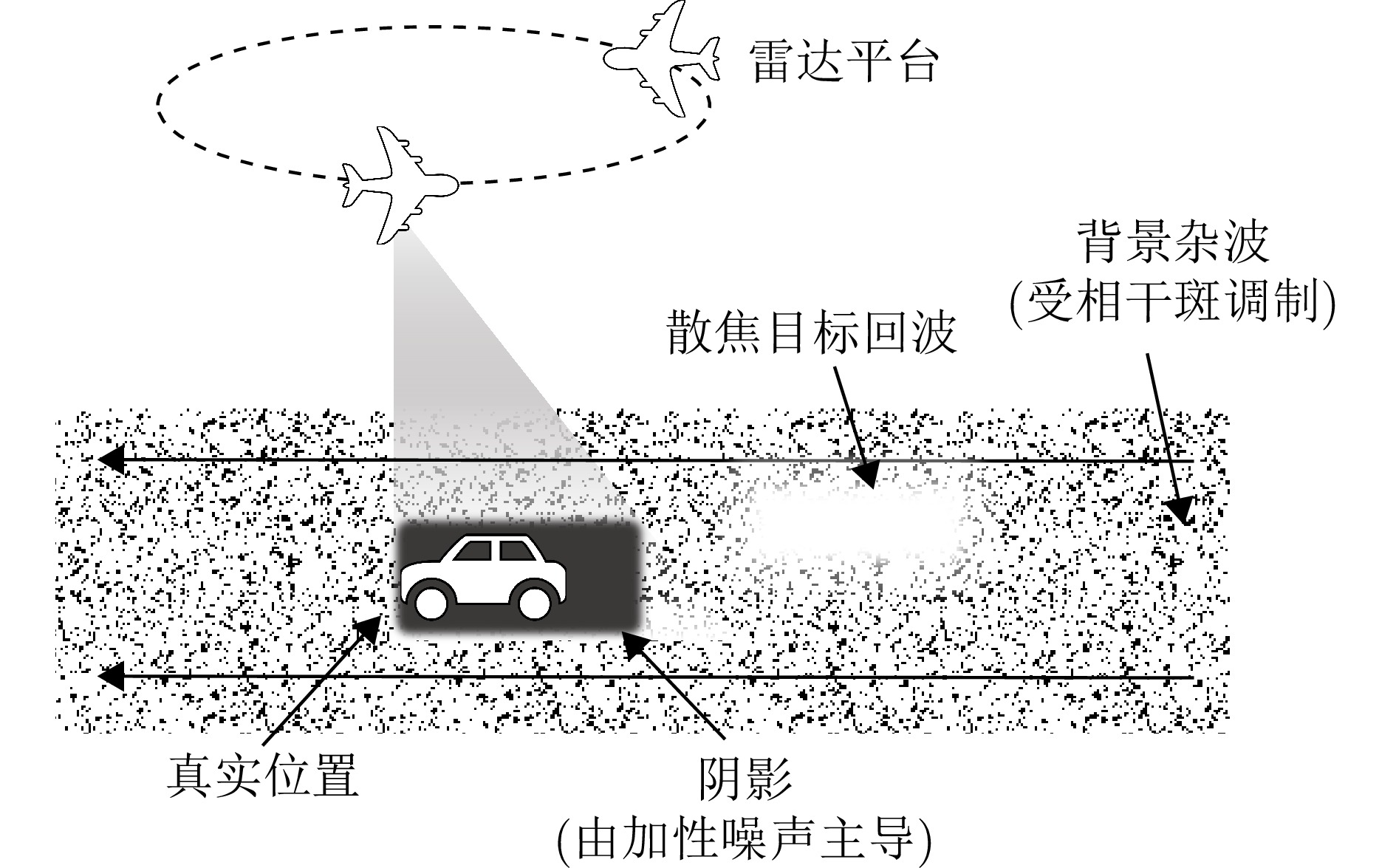
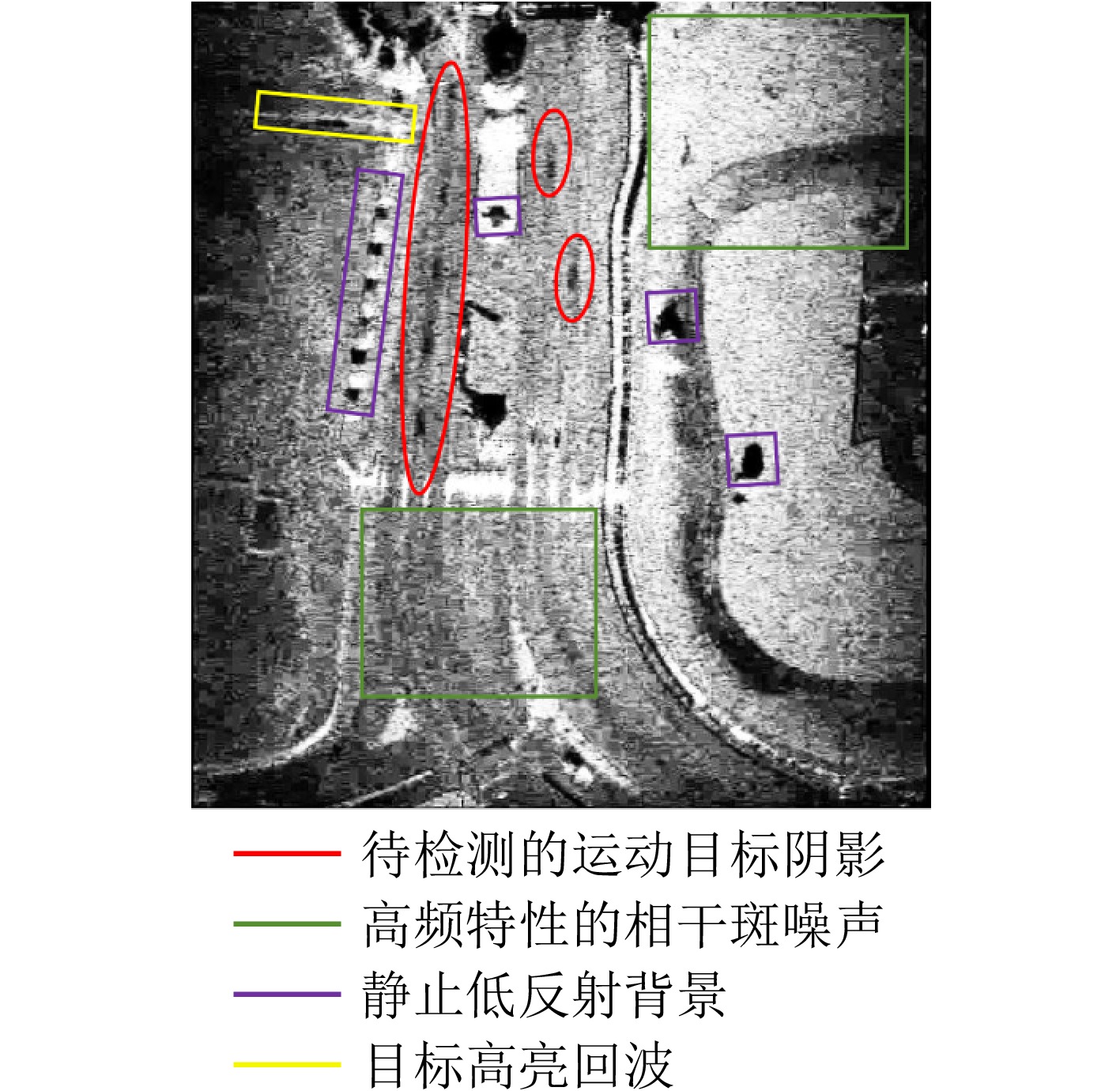
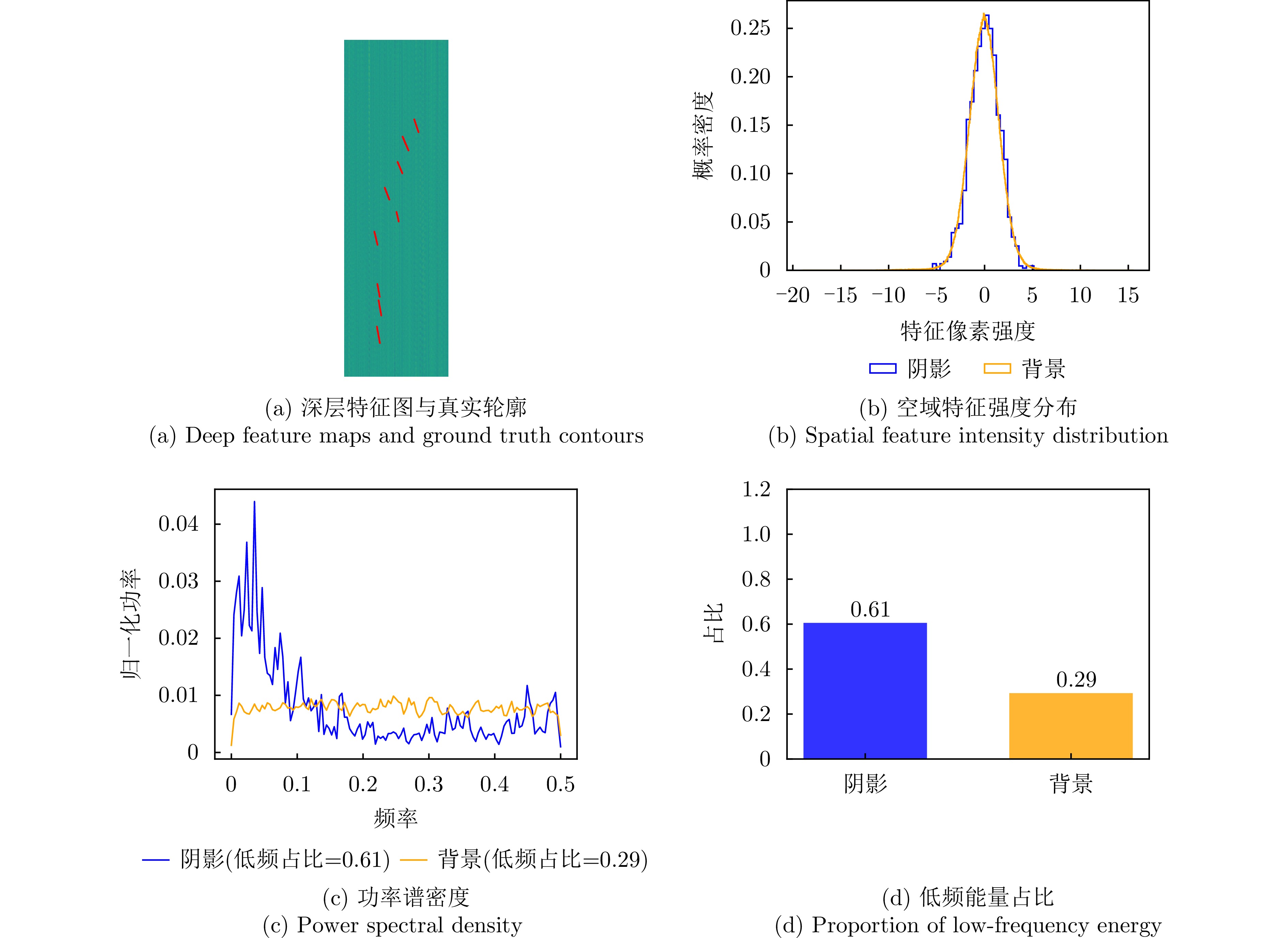
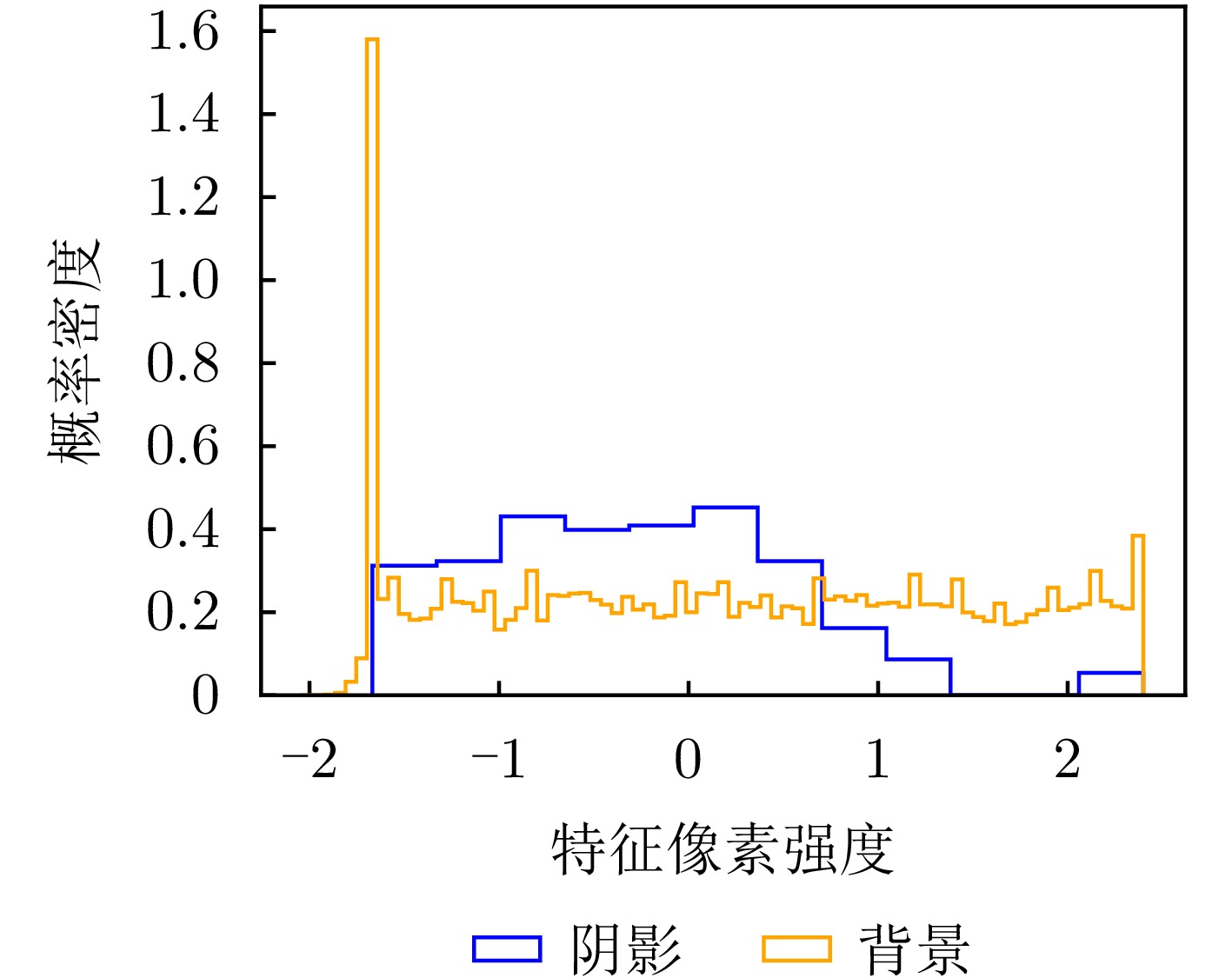
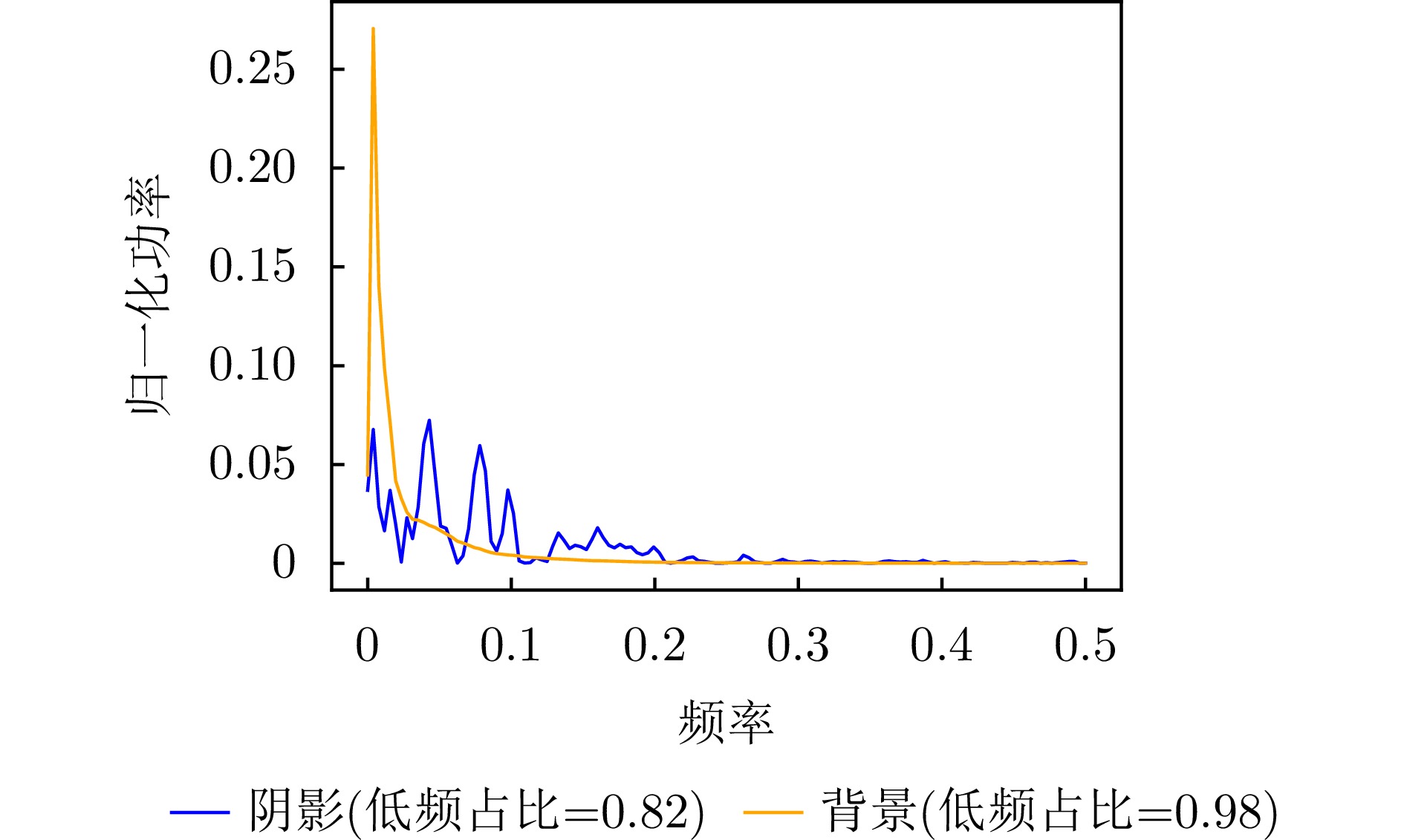
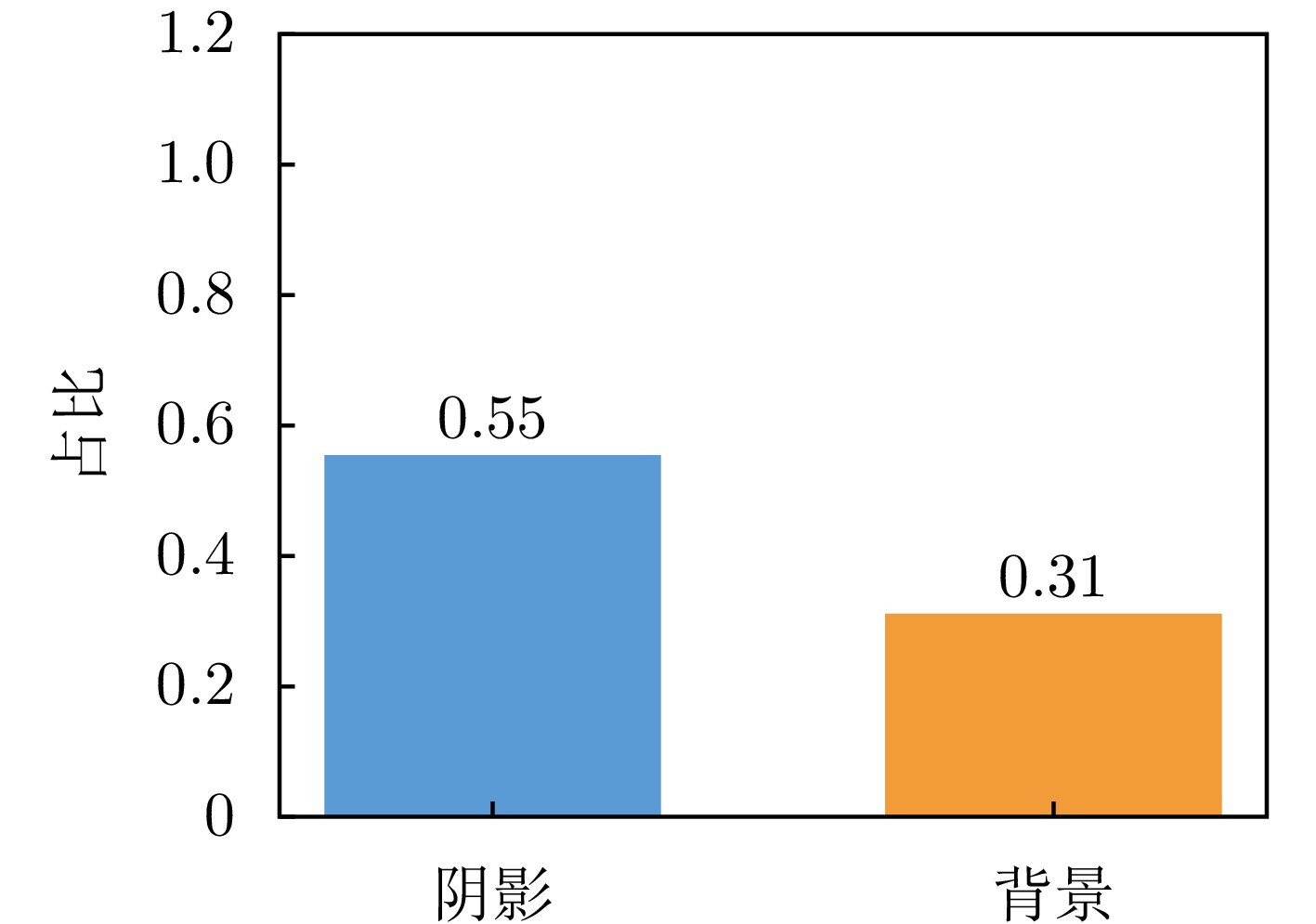
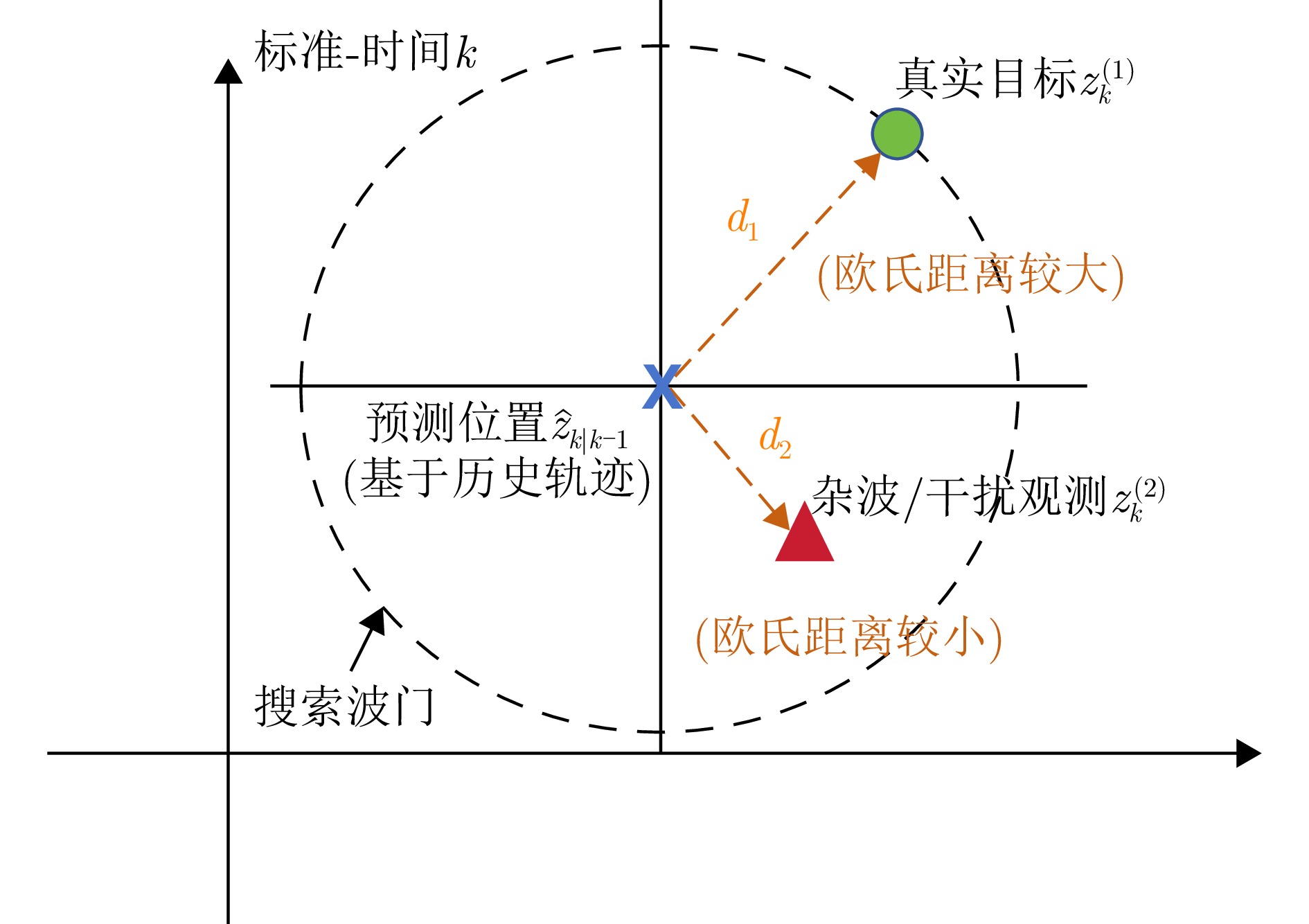
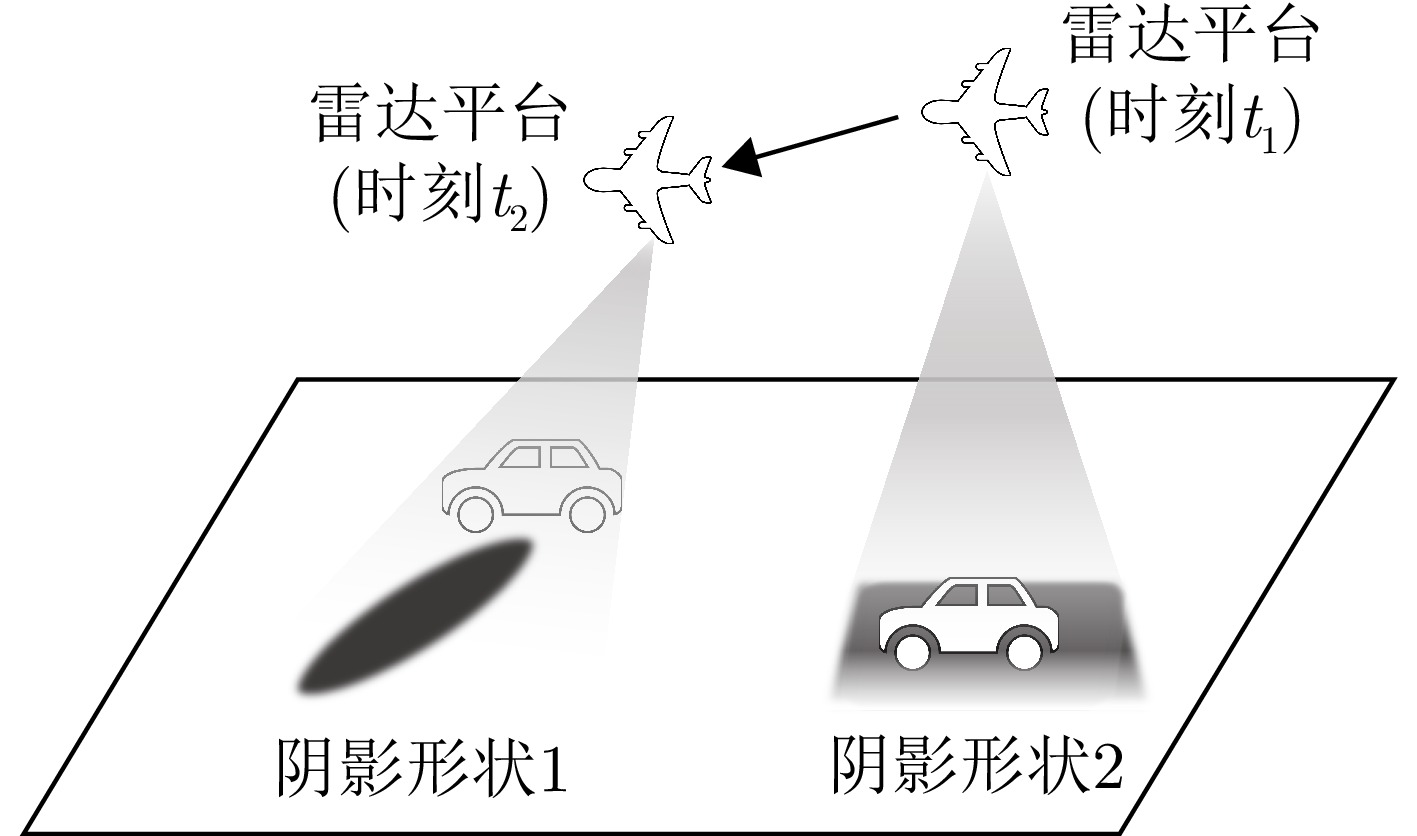
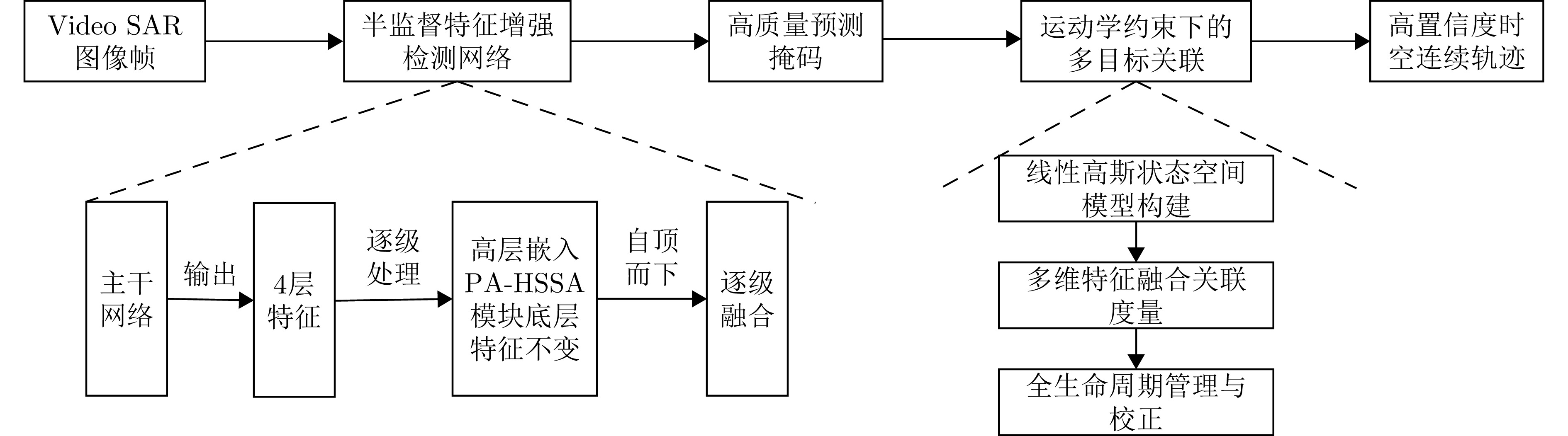
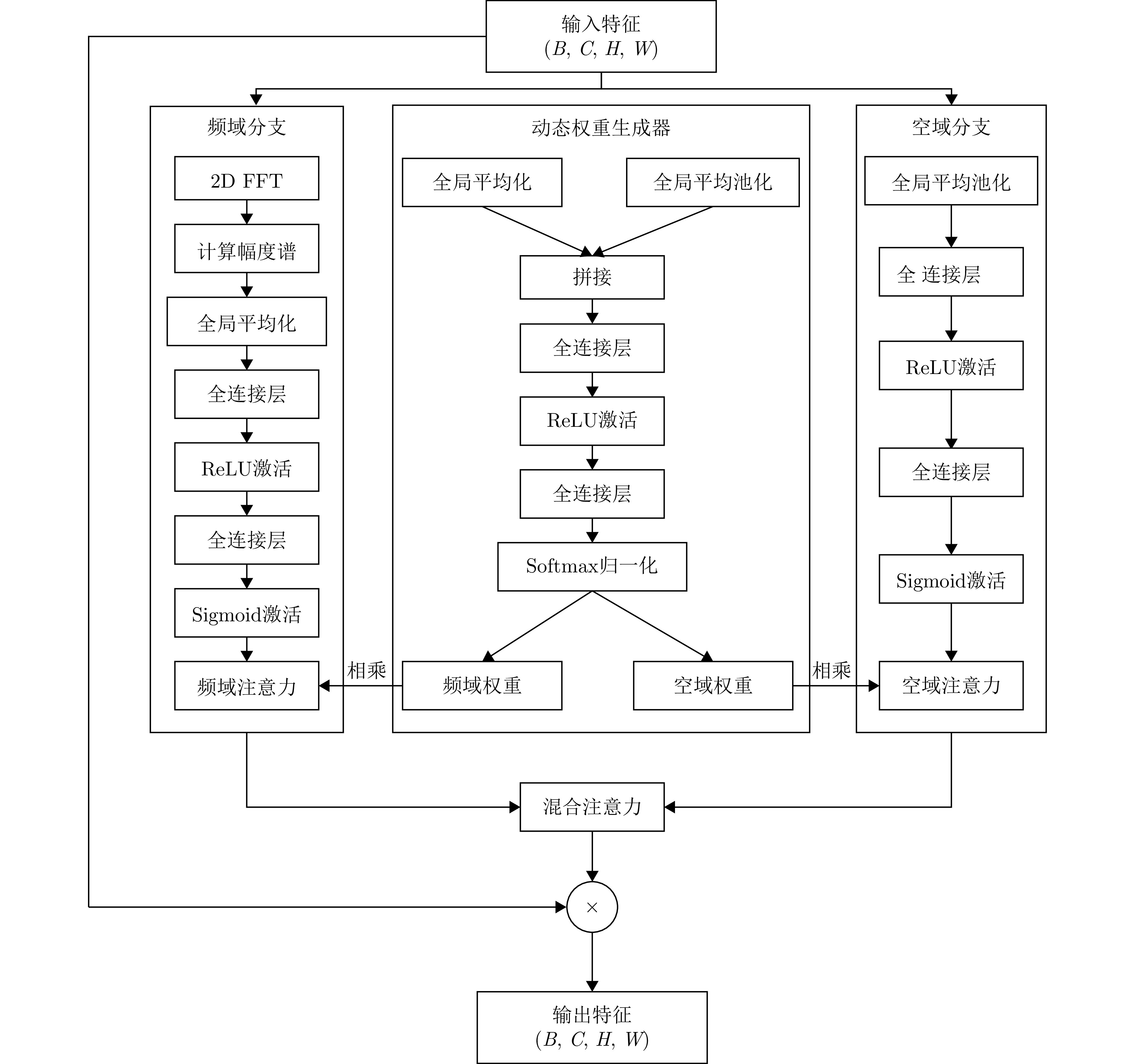
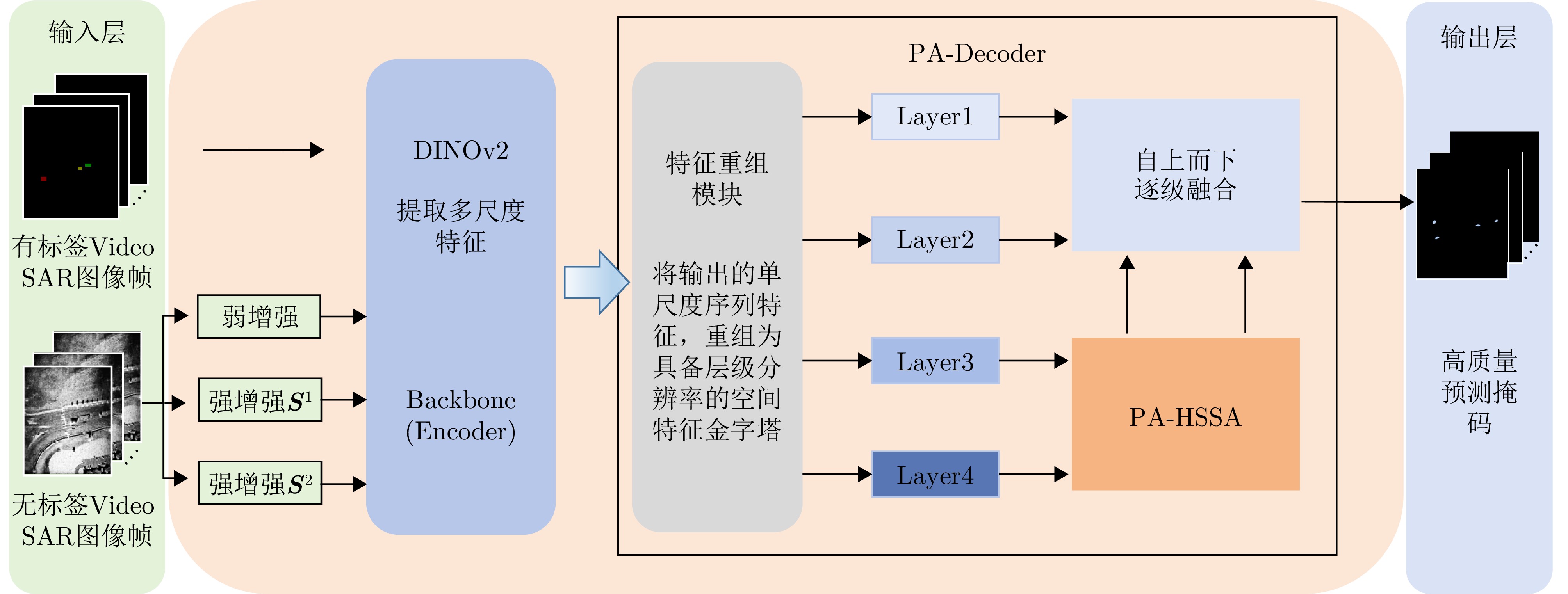
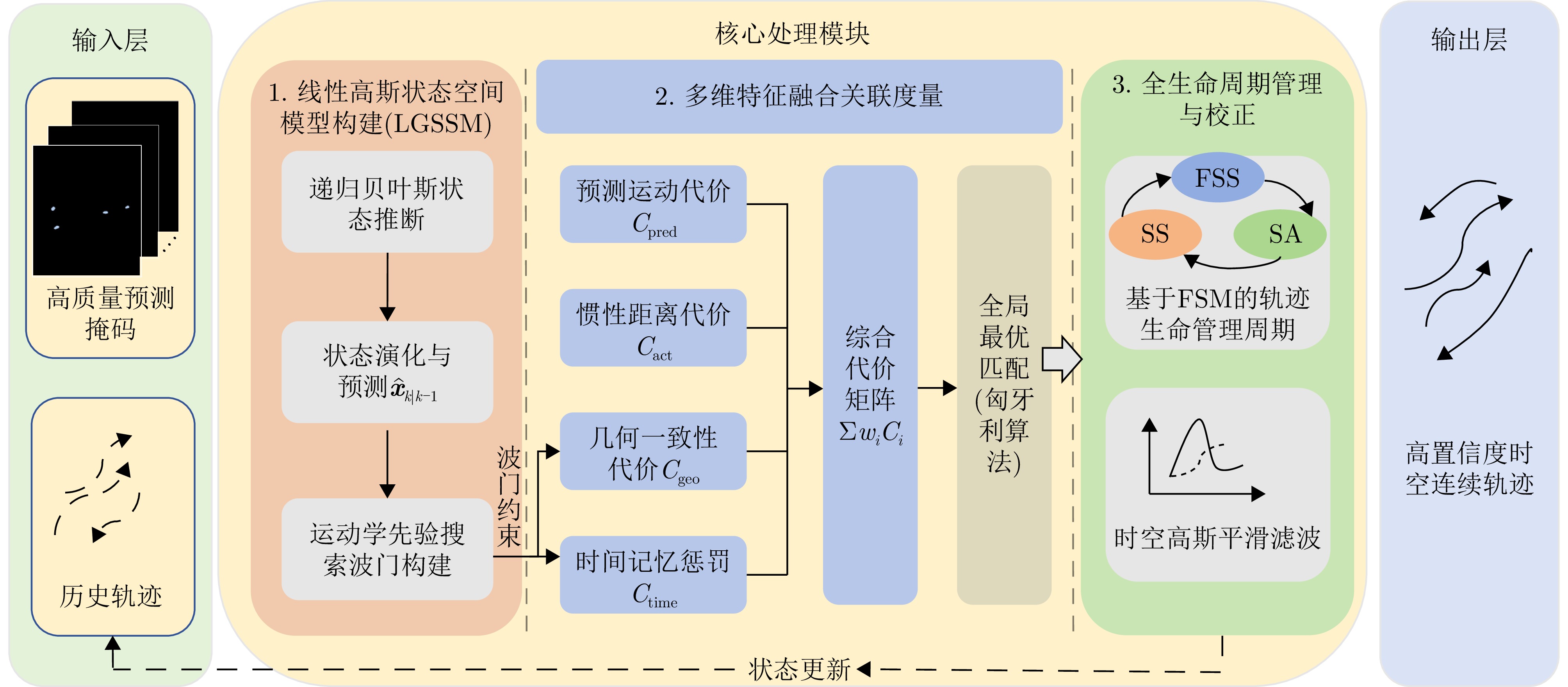
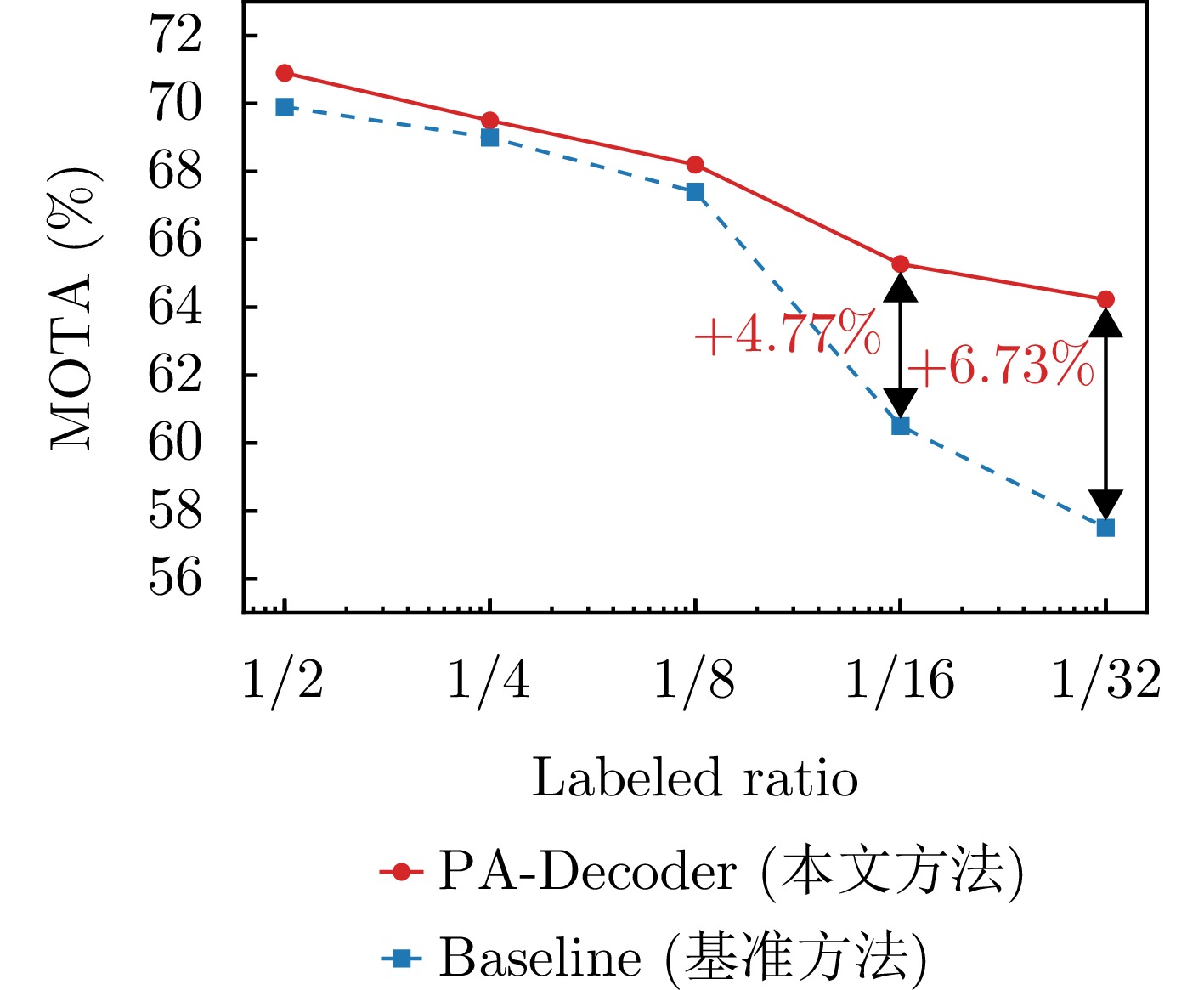
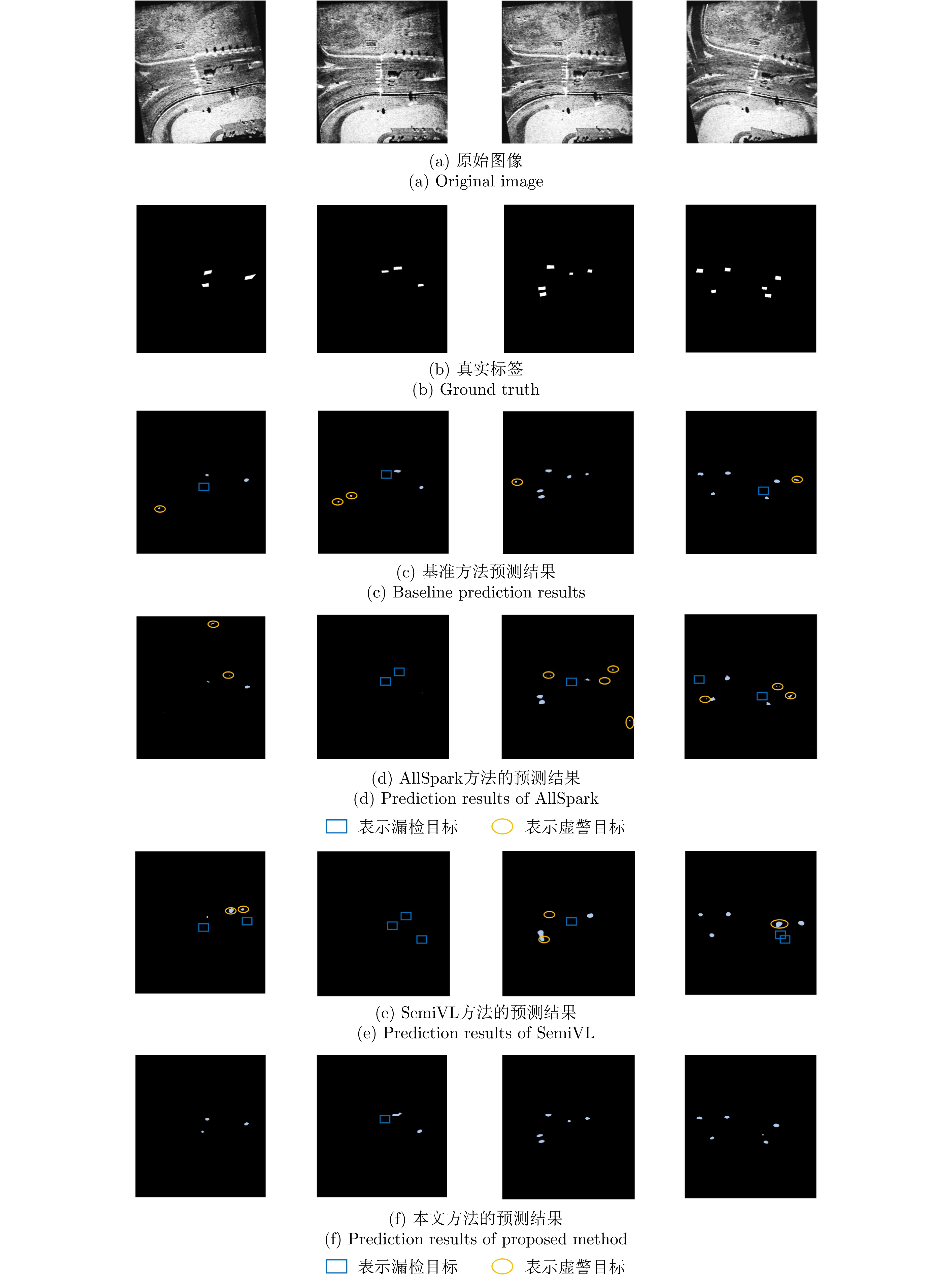
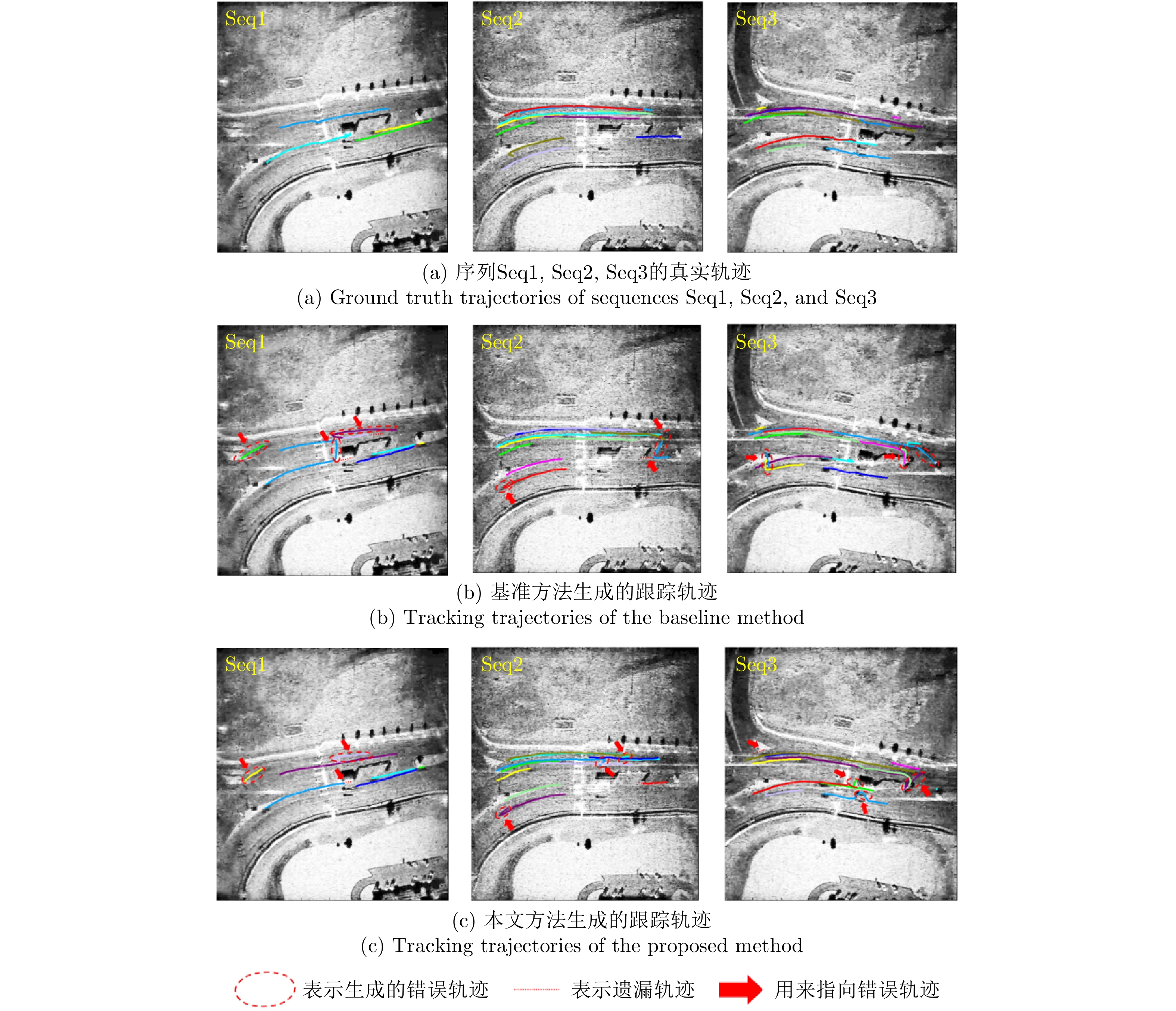
Moving target shadow tracking in Video Synthetic Aperture Radar (Video SAR) faces significant challenges, including strong speckle noise interference, substantial nonrigid target deformation, and a scarcity of supervised training samples. To address these issues, we propose a semi-supervised tracking method that integrates physics-aware spectral spatial attention and kinematic constraints. For the detection stage, we construct a semi-supervised feature enhancement network based on an improved UniMatchV2 architecture. Specifically, to account for the spectral spatial characteristics of SAR images, a Physics-Aware Hybrid Spectral Spatial Attention (PA-HSSA) module is designed and embedded into the high-level feature space of the decoder. This module utilizes its spectral branch to globally suppress wideband high-grequercy interference and its spatial branch to locally anchor the shadow’s geometric structure. A dynamic weight generator is introduced to adaptively fuse the dual-domain features, thereby generating high-quality prediction masks under extremely low annotation ratios. For the tracking stage, we propose a spatiotemporal association framework tailored for semi-supervised uncertainty. The framework includes a kinematic prior gate based on a Linear Gaussian State Space Model (LGSSM) to smooth and correct jittery detection edges. Subsequently, a multidimensional cost matrix integrating kinematic residuals and geometric consistency is built to resolve association ambiguities caused by target maneuverability and deformation. Experimental results on measured data from Sandia National Laboratories (SNL) demonstrate that the proposed method achieves a Multiple Object Tracking Accuracy (MOTA) of 64.19% using only 1/32 of the labeled data, outperforming baseline methods by 6.73%. This method effectively addresses the challenge of robustly tracking weak and small shadows in heavily cluttered backgrounds.
Moving target shadow tracking in Video Synthetic Aperture Radar (Video SAR) faces significant challenges, including strong speckle noise interference, substantial nonrigid target deformation, and a scarcity of supervised training samples. To address these issues, we propose a semi-supervised tracking method that integrates physics-aware spectral spatial attention and kinematic constraints. For the detection stage, we construct a semi-supervised feature enhancement network based on an improved UniMatchV2 architecture. Specifically, to account for the spectral spatial characteristics of SAR images, a Physics-Aware Hybrid Spectral Spatial Attention (PA-HSSA) module is designed and embedded into the high-level feature space of the decoder. This module utilizes its spectral branch to globally suppress wideband high-grequercy interference and its spatial branch to locally anchor the shadow’s geometric structure. A dynamic weight generator is introduced to adaptively fuse the dual-domain features, thereby generating high-quality prediction masks under extremely low annotation ratios. For the tracking stage, we propose a spatiotemporal association framework tailored for semi-supervised uncertainty. The framework includes a kinematic prior gate based on a Linear Gaussian State Space Model (LGSSM) to smooth and correct jittery detection edges. Subsequently, a multidimensional cost matrix integrating kinematic residuals and geometric consistency is built to resolve association ambiguities caused by target maneuverability and deformation. Experimental results on measured data from Sandia National Laboratories (SNL) demonstrate that the proposed method achieves a Multiple Object Tracking Accuracy (MOTA) of 64.19% using only 1/32 of the labeled data, outperforming baseline methods by 6.73%. This method effectively addresses the challenge of robustly tracking weak and small shadows in heavily cluttered backgrounds.
2026,
15(2):
503-522.
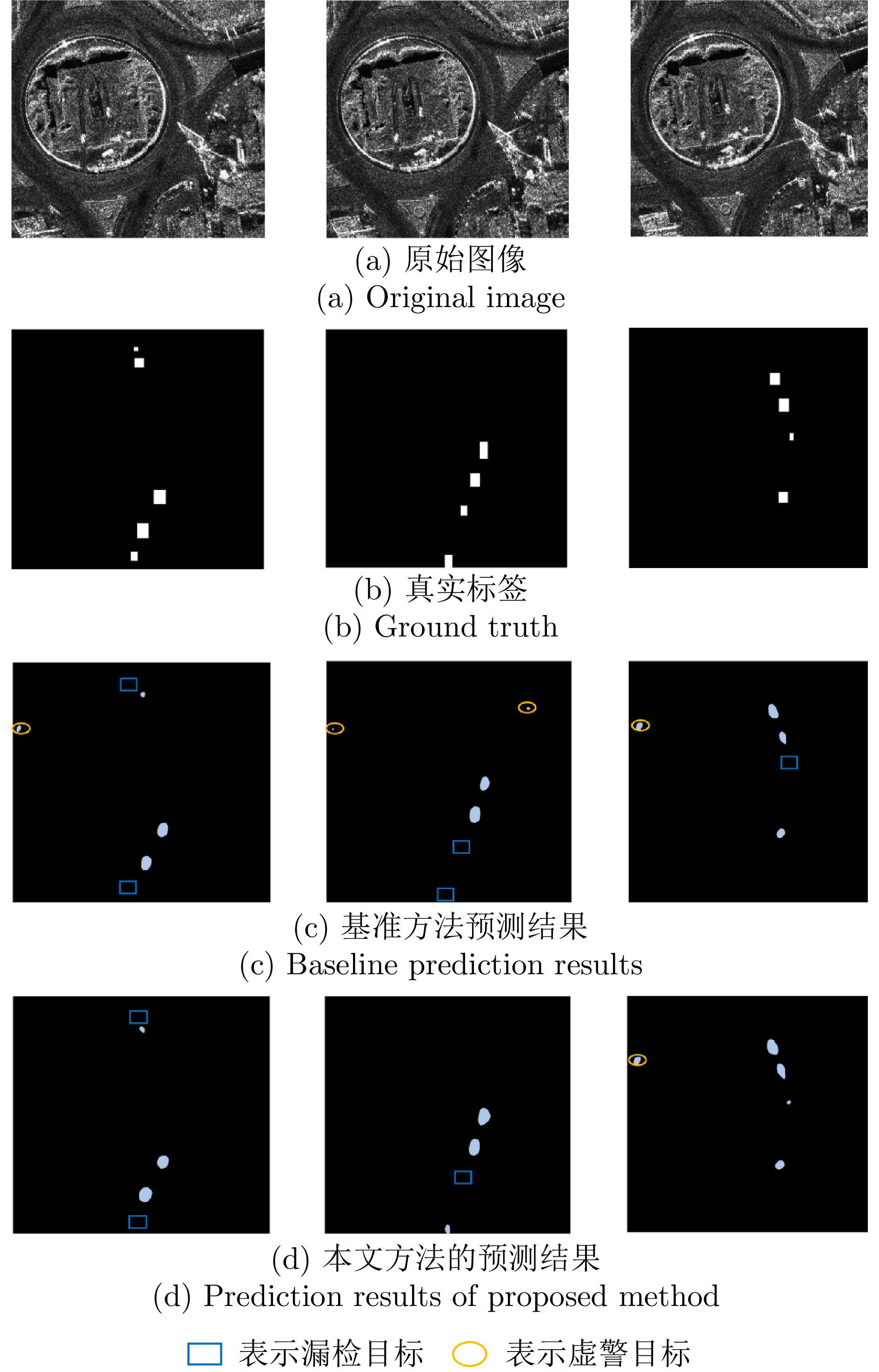
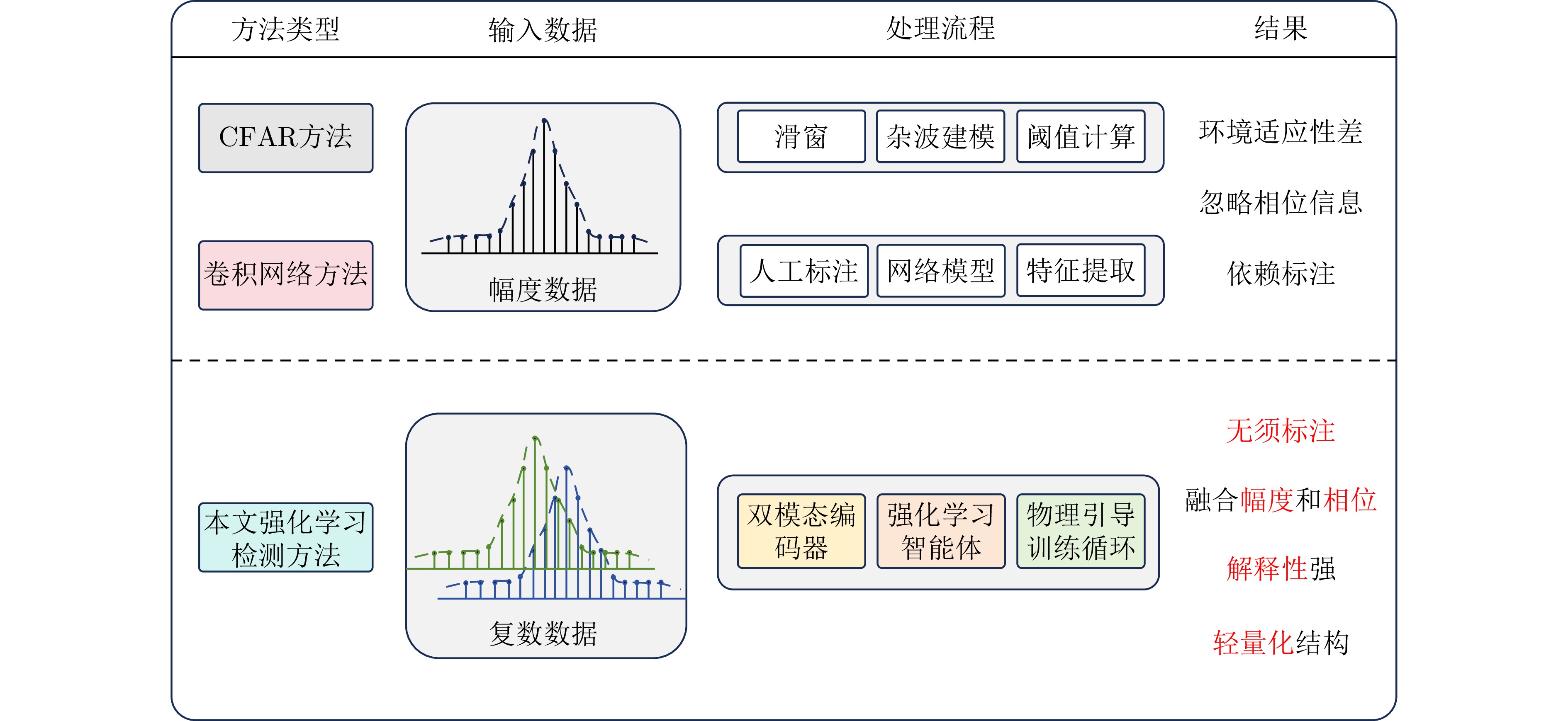
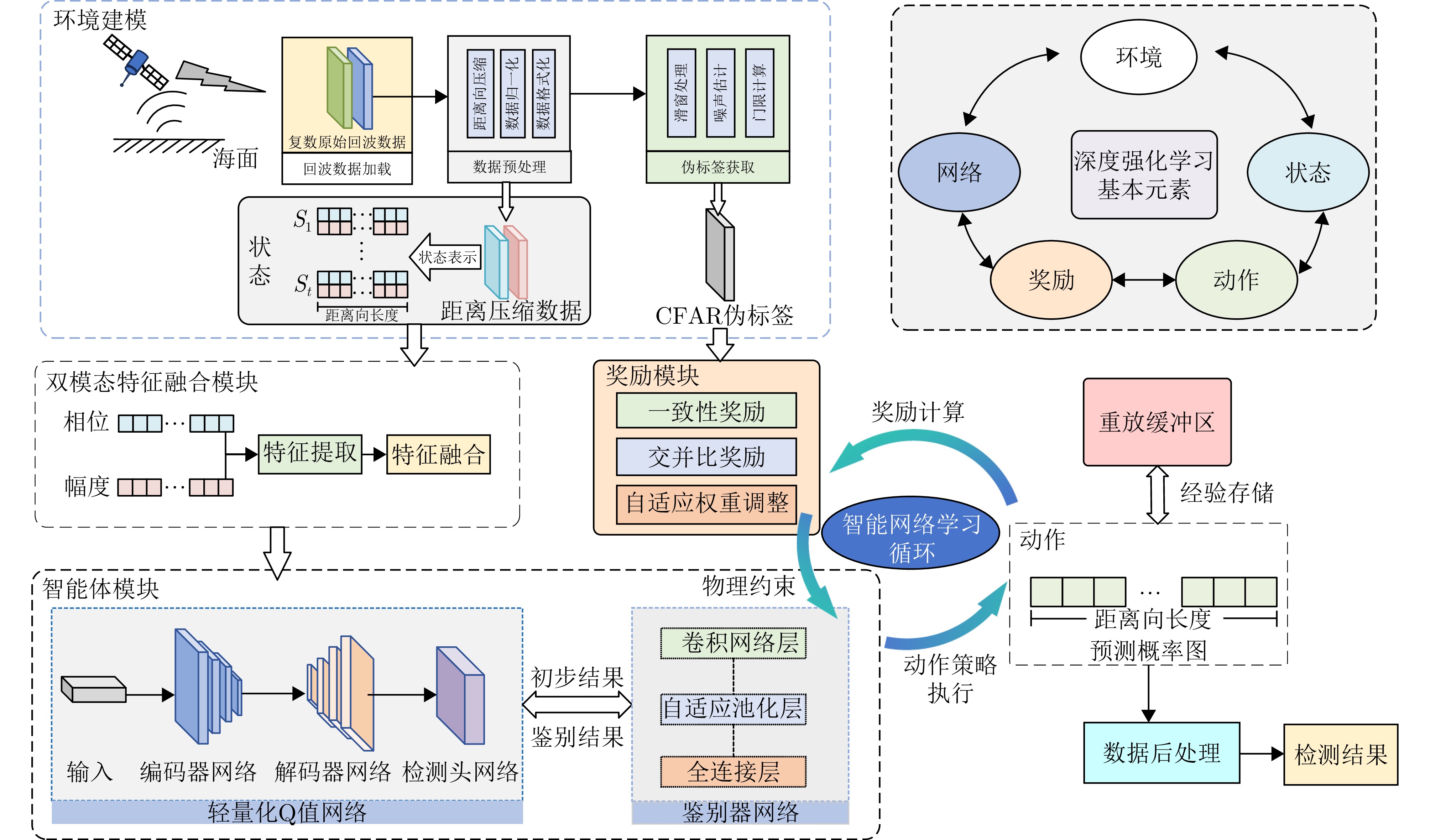
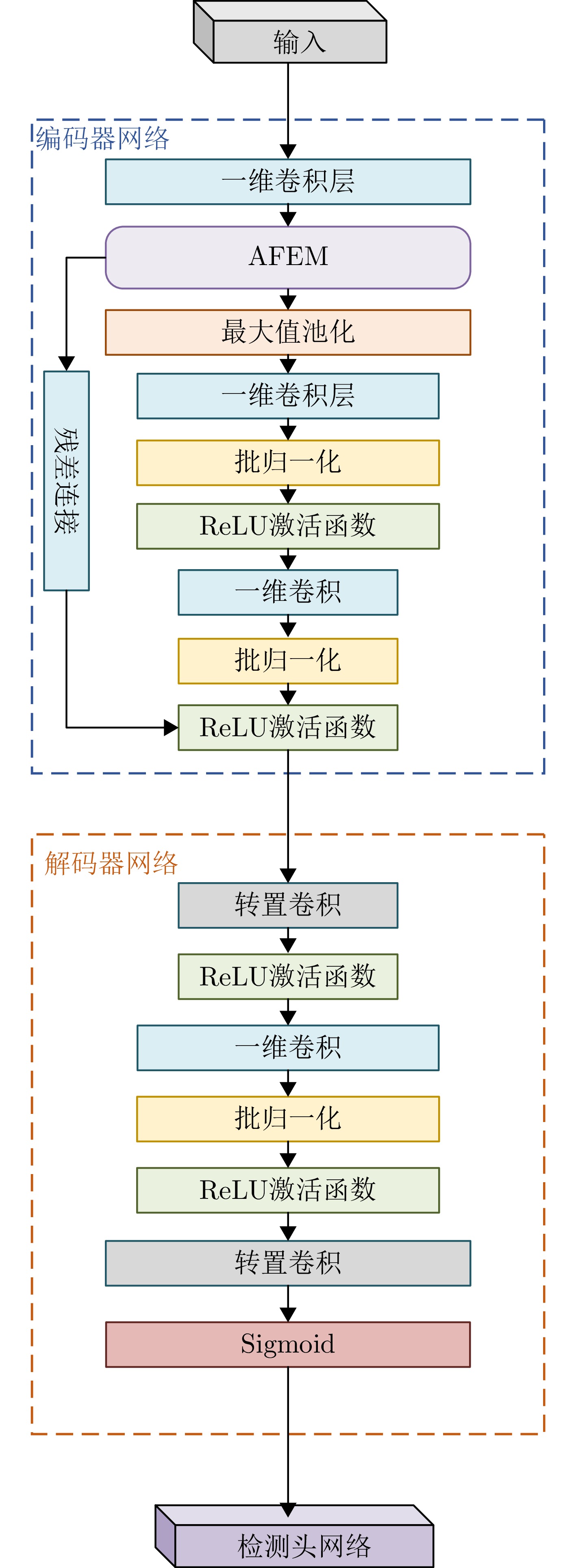
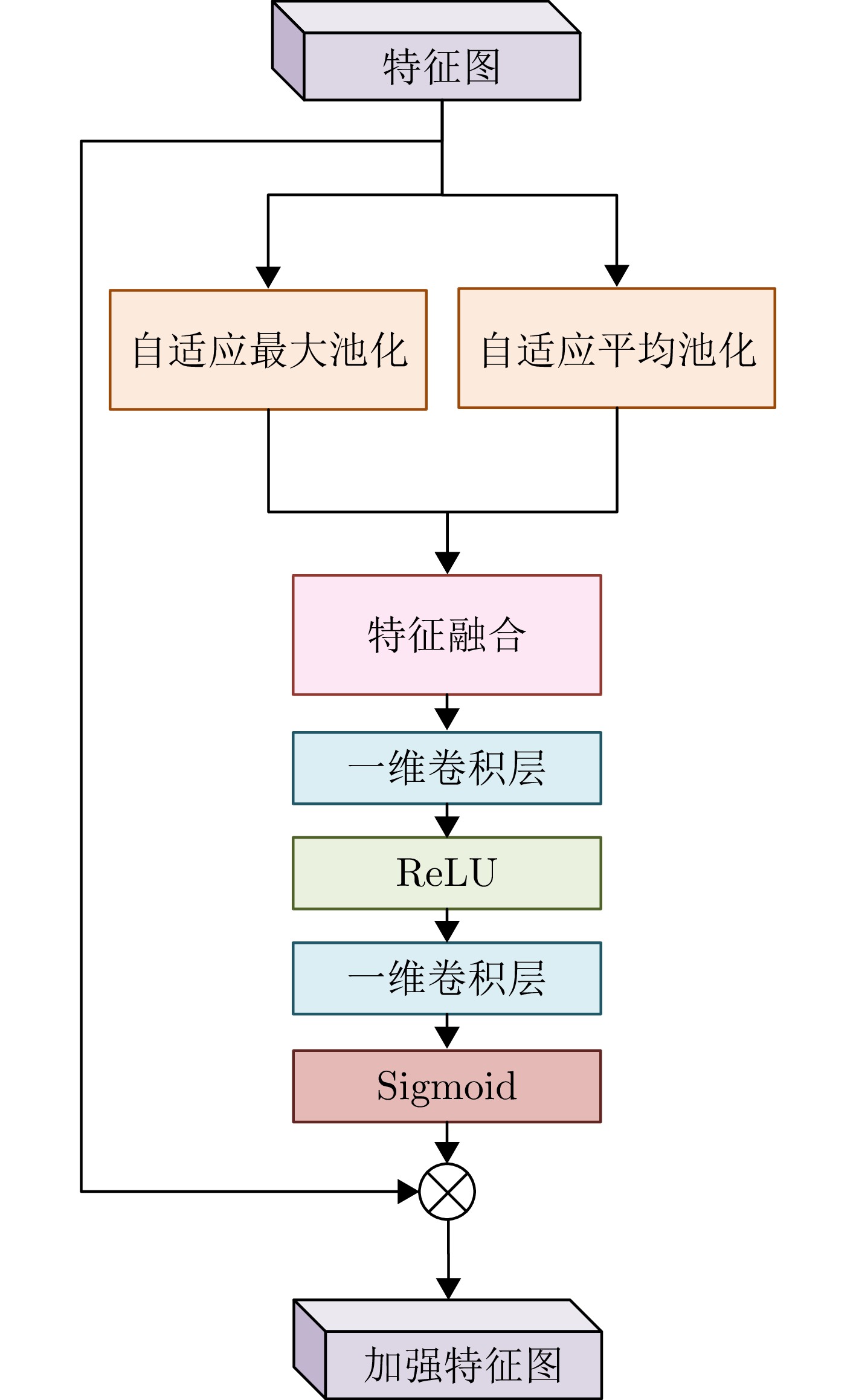
Synthetic Aperture Radar (SAR) offers all-weather, all-day maritime surveillance capabilities. Direct ship detection in the Range Compressed Domain (RCD) eliminates computationally intensive imaging steps—such as range cell migration correction and azimuth compression—thereby considerably improving processing efficiency for near-real-time or real-time applications. However, current detection methods face inherent limitations; traditional constant false alarm rate detectors rely on fixed statistical models and often underperform in complex sea clutter environments. In addition, deep learning approaches heavily rely on annotated data and do not fully leverage phase information; moreover, they exhibit weak interpretability. To address these issues, this paper proposes a self-supervised reinforcement learning framework for ship target detection in the SAR RCD. This framework effectively integrates the physical principles of radar signals with deep reinforcement learning, achieving enhanced detection performance while improving model interpretability and generalization. The framework has the following characteristics: (1) It introduces a reward signal-generation mechanism constrained by statistical scattering models, achieving self-supervised learning without the need for manual annotation; (2) It designs a dual-modal feature-fusion module that can jointly represent amplitude and phase information, effectively retaining the Doppler characteristics of ships; and (3) It adopts a lightweight agent module that integrates a lightweight Q-network, an adaptive feature enhancement module, and a discriminator network; this module reduces computational complexity, meets real-time processing requirements, and enhances the robustness of the model through adversarial training. Experimental results demonstrate that the proposed method achieves an average inference time of only 31.75 s on a large-scale SAR RCD dataset of 20 k×20 k pixels, with a computational load of only 23.81% compared with a two-dimensional convolutional neural network. On a complex-valued RCD dataset, the method attains F1 and recall scores of 50.72% and 54.28%, respectively, outperforming mainstream self-supervised methods by 8.76% and 10.45%, respectively. This study pioneers the application of reinforcement learning to ship detection using SAR RCD, offering a novel approach to robust maritime surveillance by integrating signal modeling and data-driven learning.
Synthetic Aperture Radar (SAR) offers all-weather, all-day maritime surveillance capabilities. Direct ship detection in the Range Compressed Domain (RCD) eliminates computationally intensive imaging steps—such as range cell migration correction and azimuth compression—thereby considerably improving processing efficiency for near-real-time or real-time applications. However, current detection methods face inherent limitations; traditional constant false alarm rate detectors rely on fixed statistical models and often underperform in complex sea clutter environments. In addition, deep learning approaches heavily rely on annotated data and do not fully leverage phase information; moreover, they exhibit weak interpretability. To address these issues, this paper proposes a self-supervised reinforcement learning framework for ship target detection in the SAR RCD. This framework effectively integrates the physical principles of radar signals with deep reinforcement learning, achieving enhanced detection performance while improving model interpretability and generalization. The framework has the following characteristics: (1) It introduces a reward signal-generation mechanism constrained by statistical scattering models, achieving self-supervised learning without the need for manual annotation; (2) It designs a dual-modal feature-fusion module that can jointly represent amplitude and phase information, effectively retaining the Doppler characteristics of ships; and (3) It adopts a lightweight agent module that integrates a lightweight Q-network, an adaptive feature enhancement module, and a discriminator network; this module reduces computational complexity, meets real-time processing requirements, and enhances the robustness of the model through adversarial training. Experimental results demonstrate that the proposed method achieves an average inference time of only 31.75 s on a large-scale SAR RCD dataset of 20 k×20 k pixels, with a computational load of only 23.81% compared with a two-dimensional convolutional neural network. On a complex-valued RCD dataset, the method attains F1 and recall scores of 50.72% and 54.28%, respectively, outperforming mainstream self-supervised methods by 8.76% and 10.45%, respectively. This study pioneers the application of reinforcement learning to ship detection using SAR RCD, offering a novel approach to robust maritime surveillance by integrating signal modeling and data-driven learning.

2026,
15(2):
523-542.
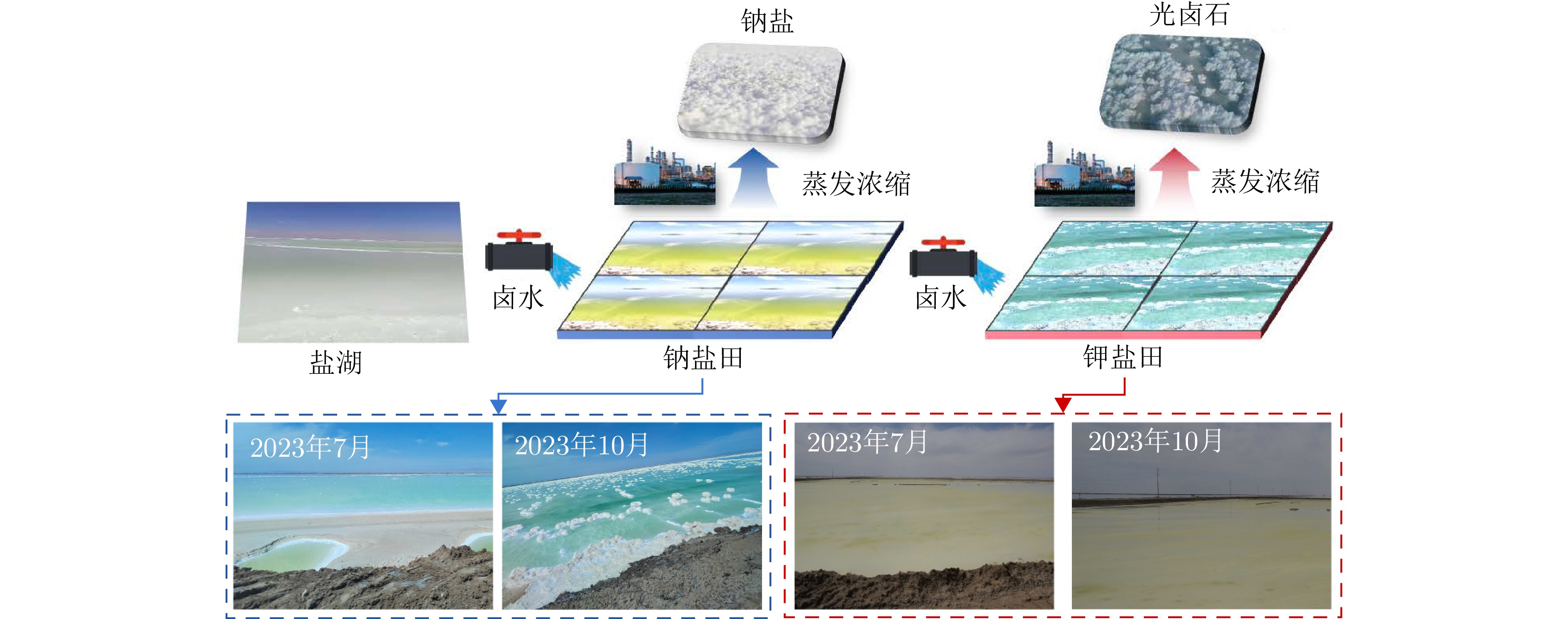
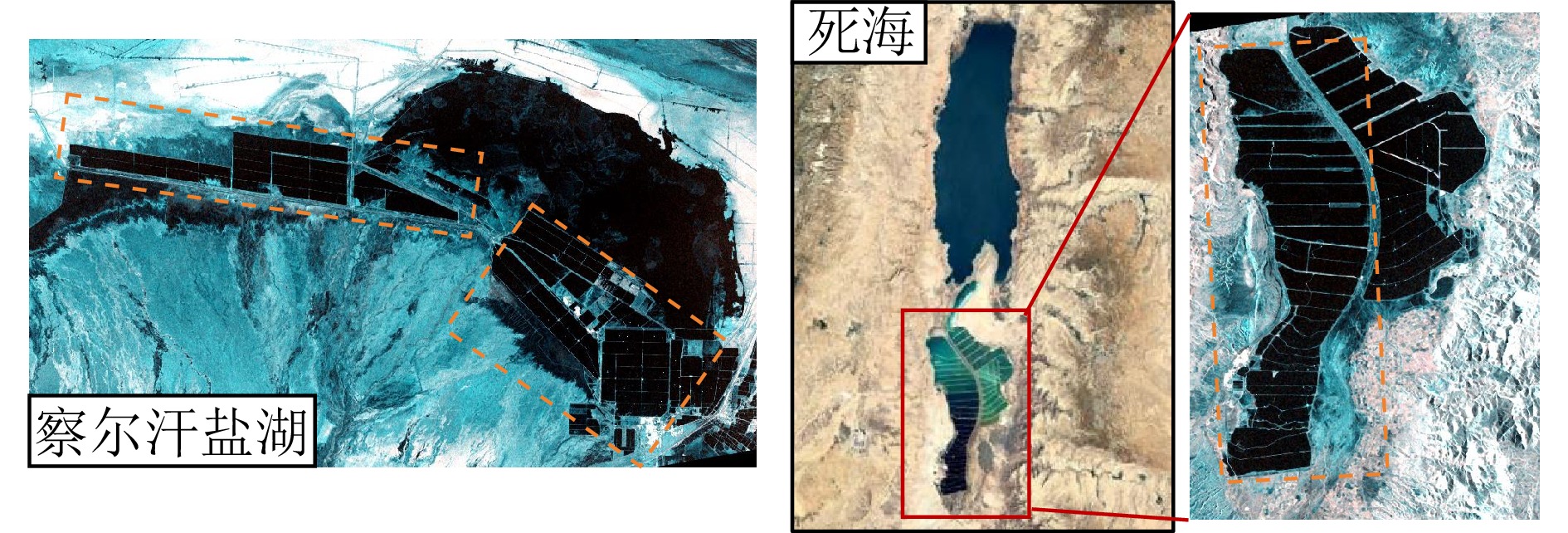
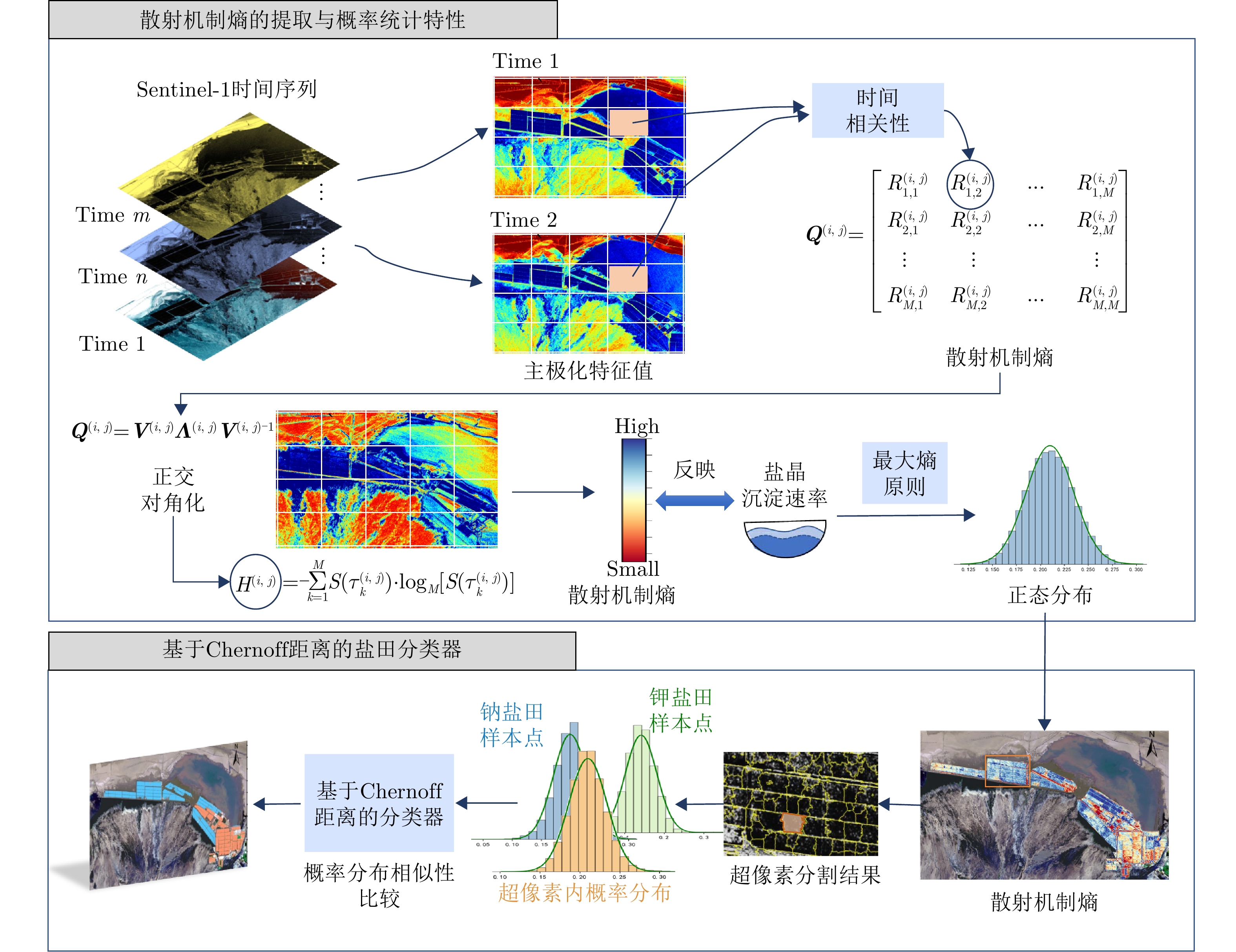
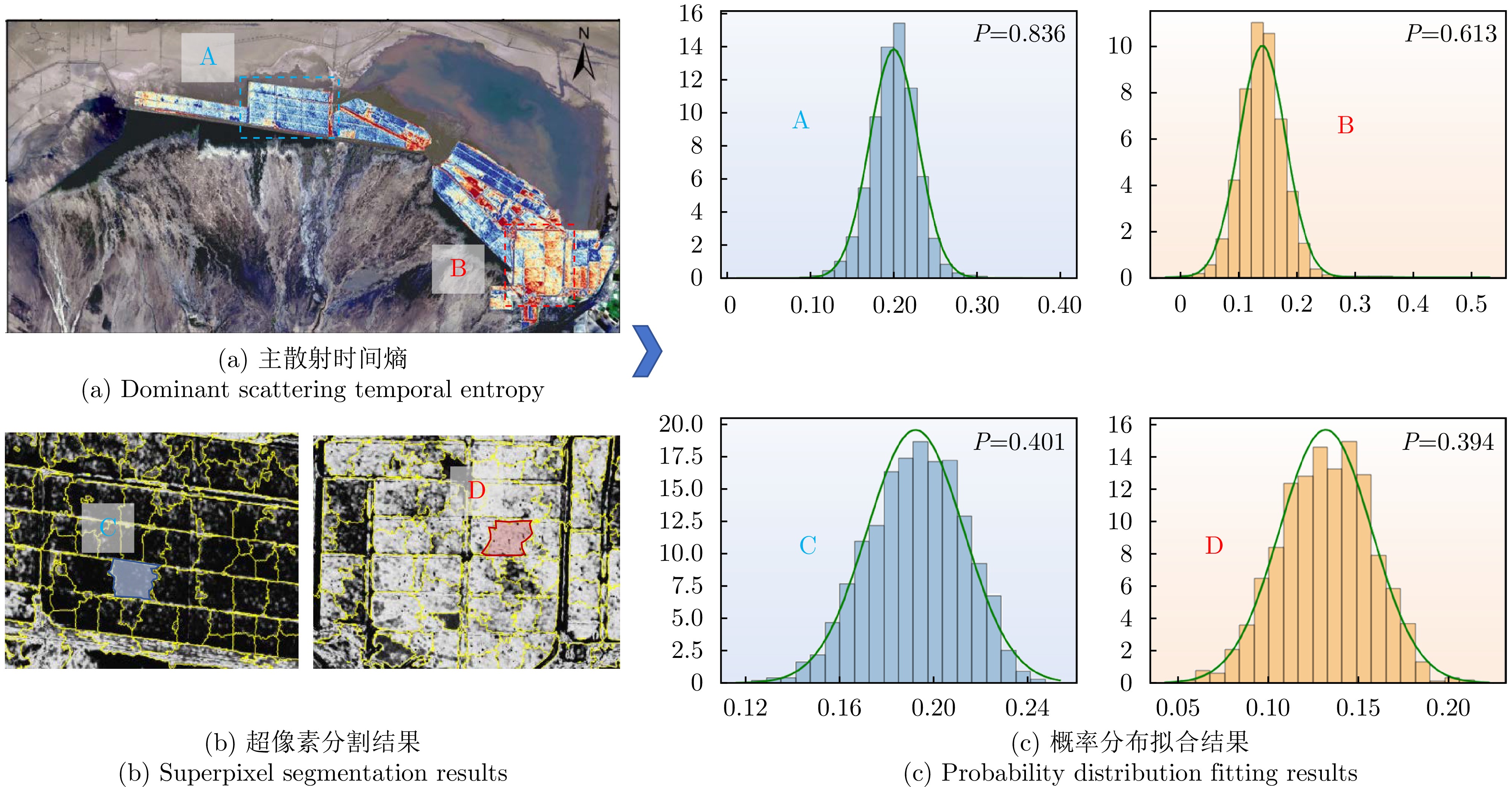
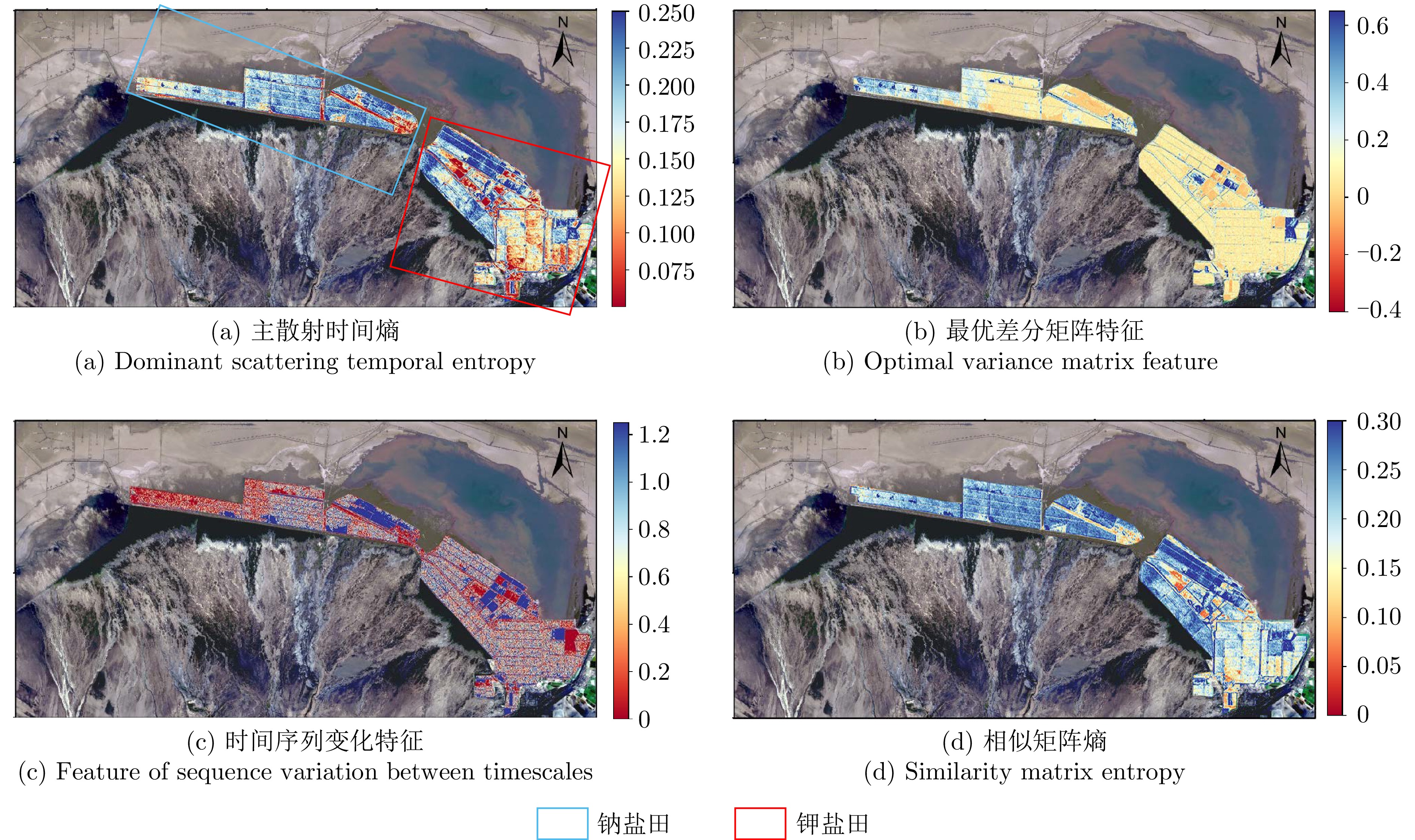
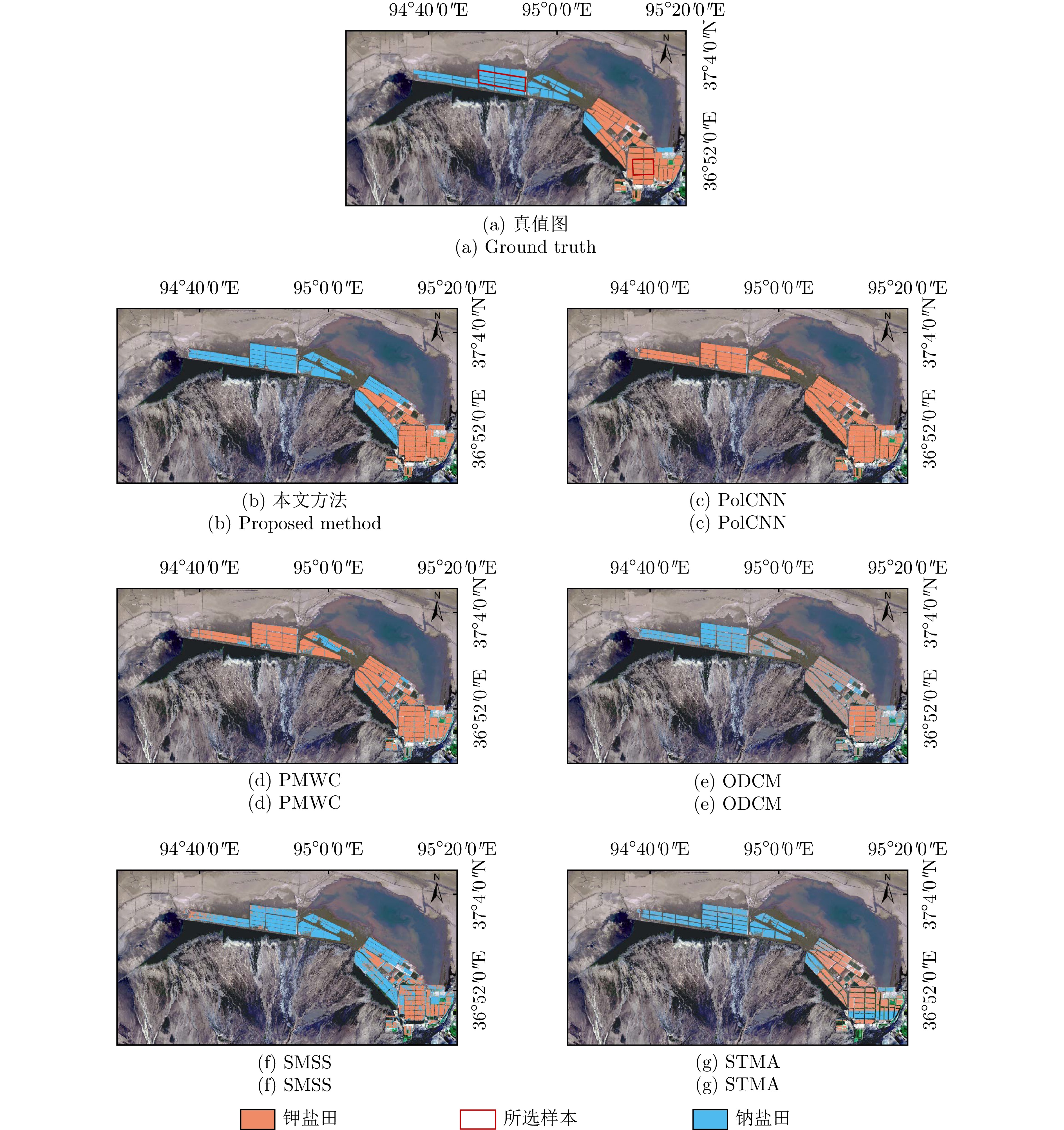
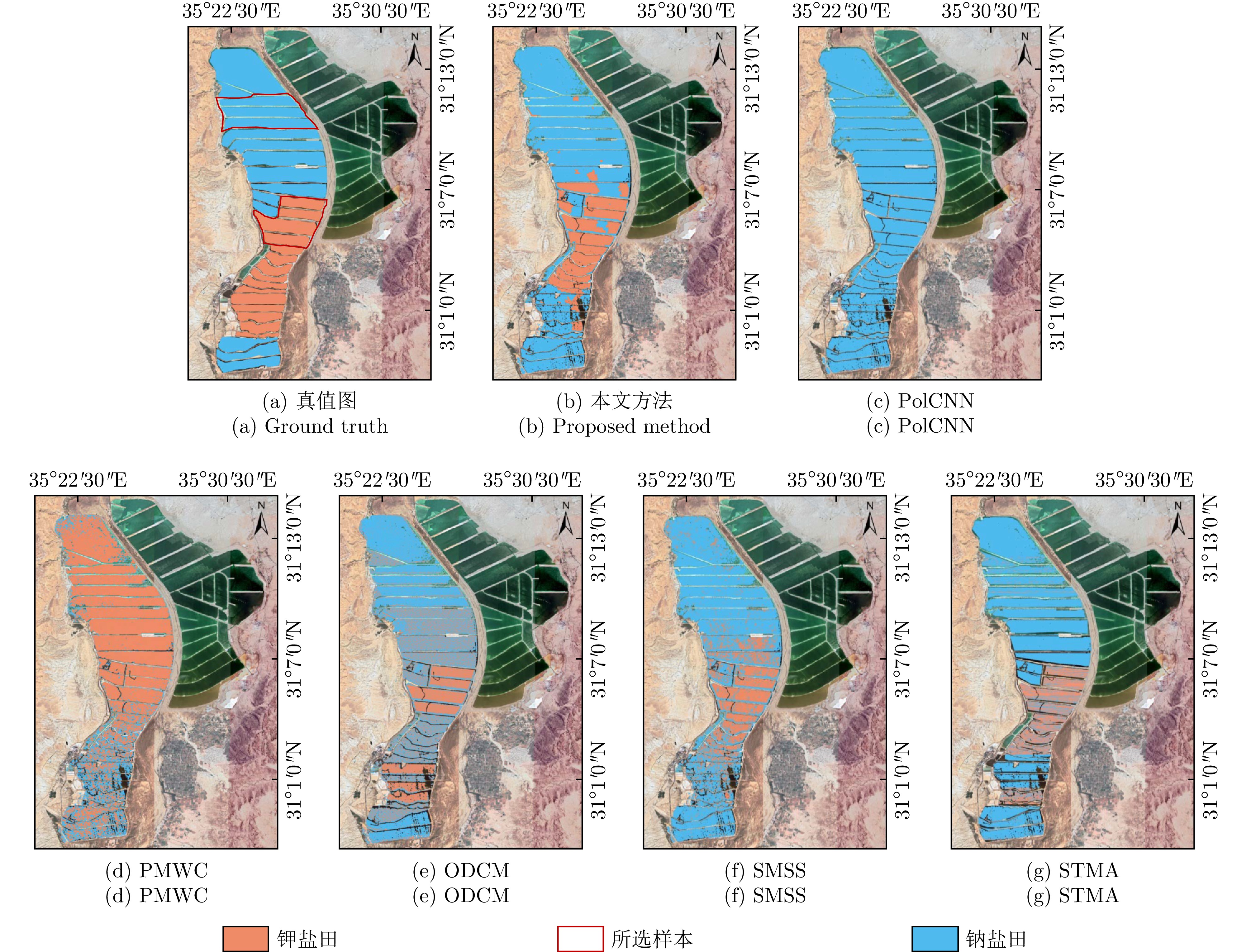
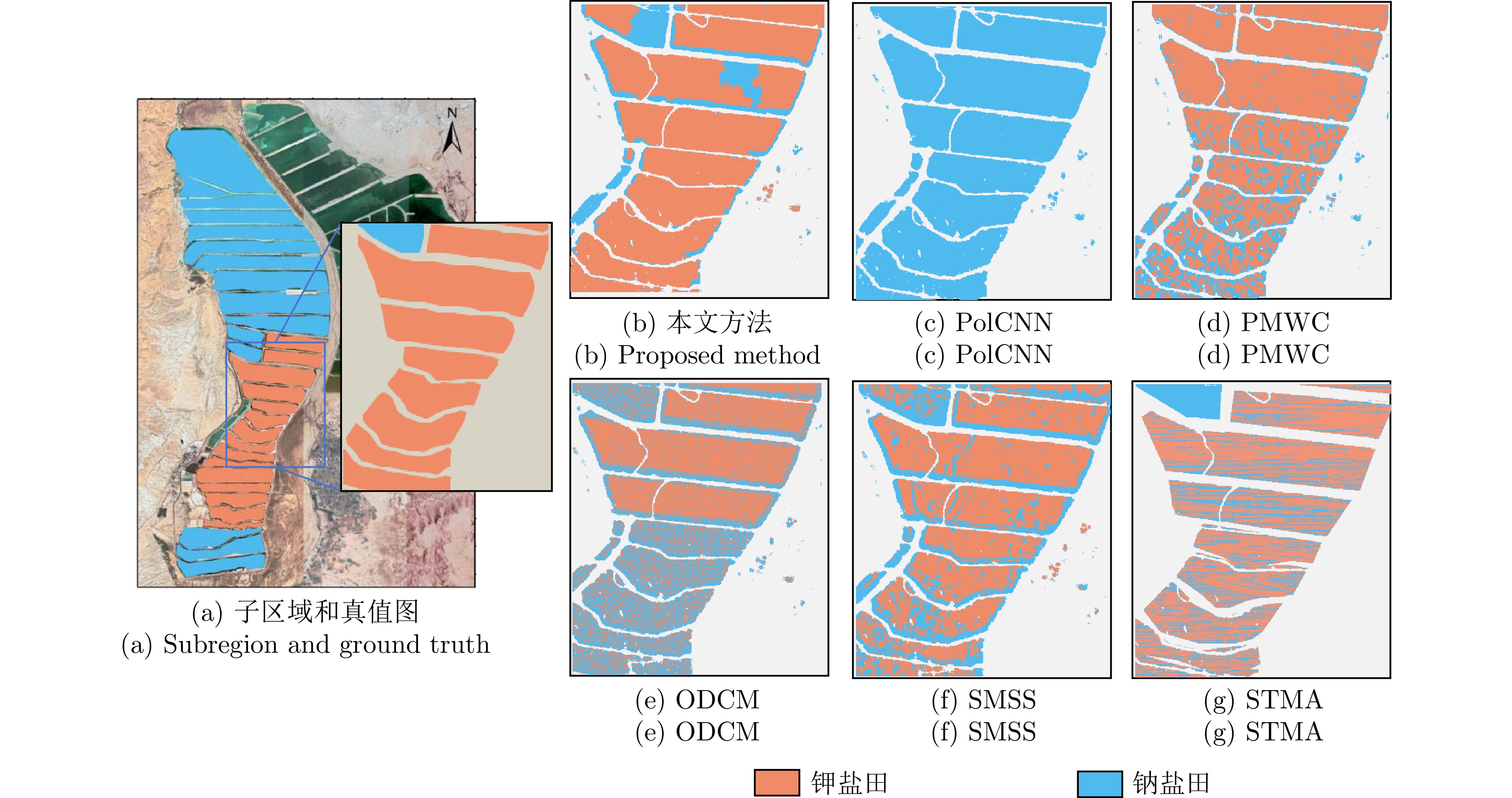
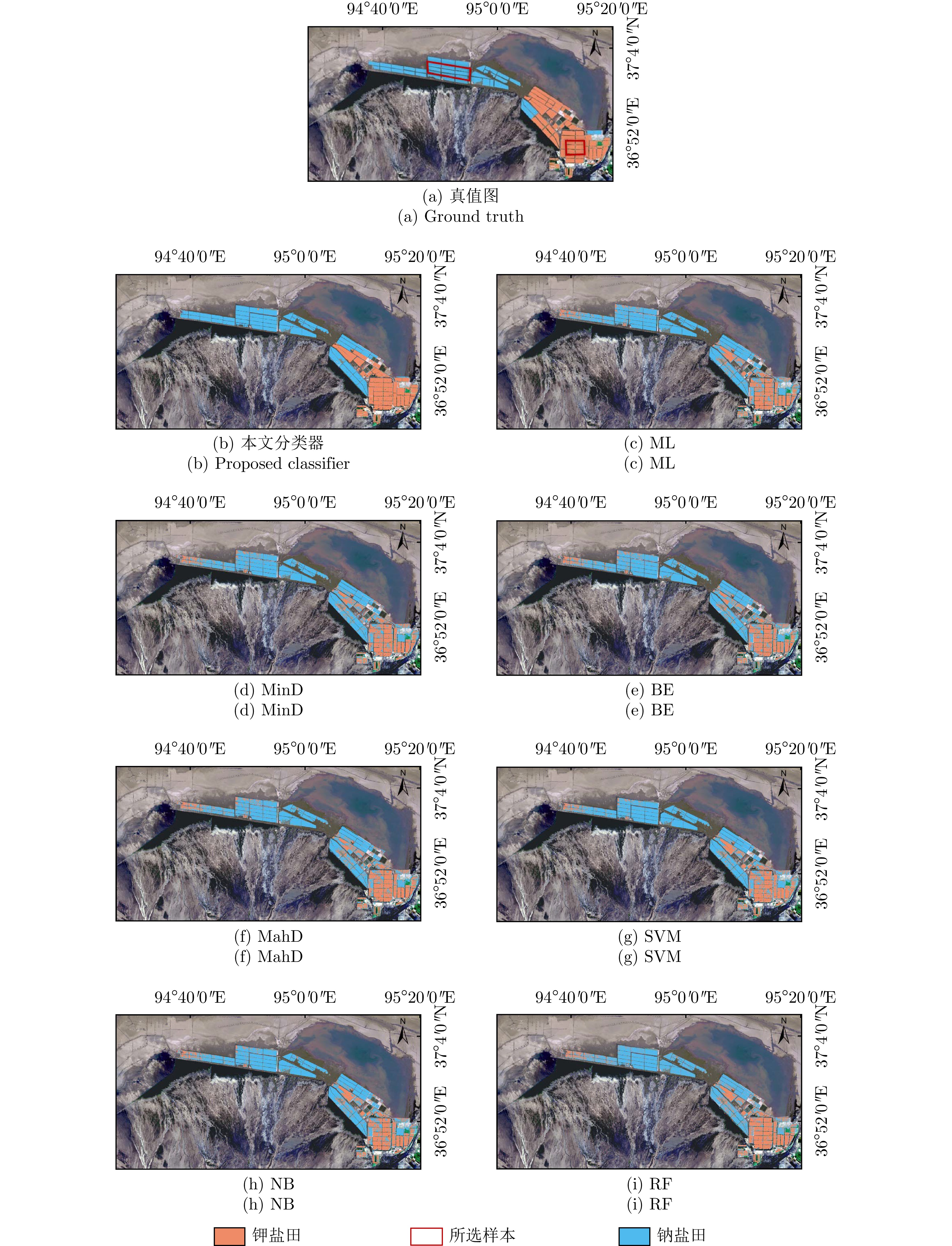
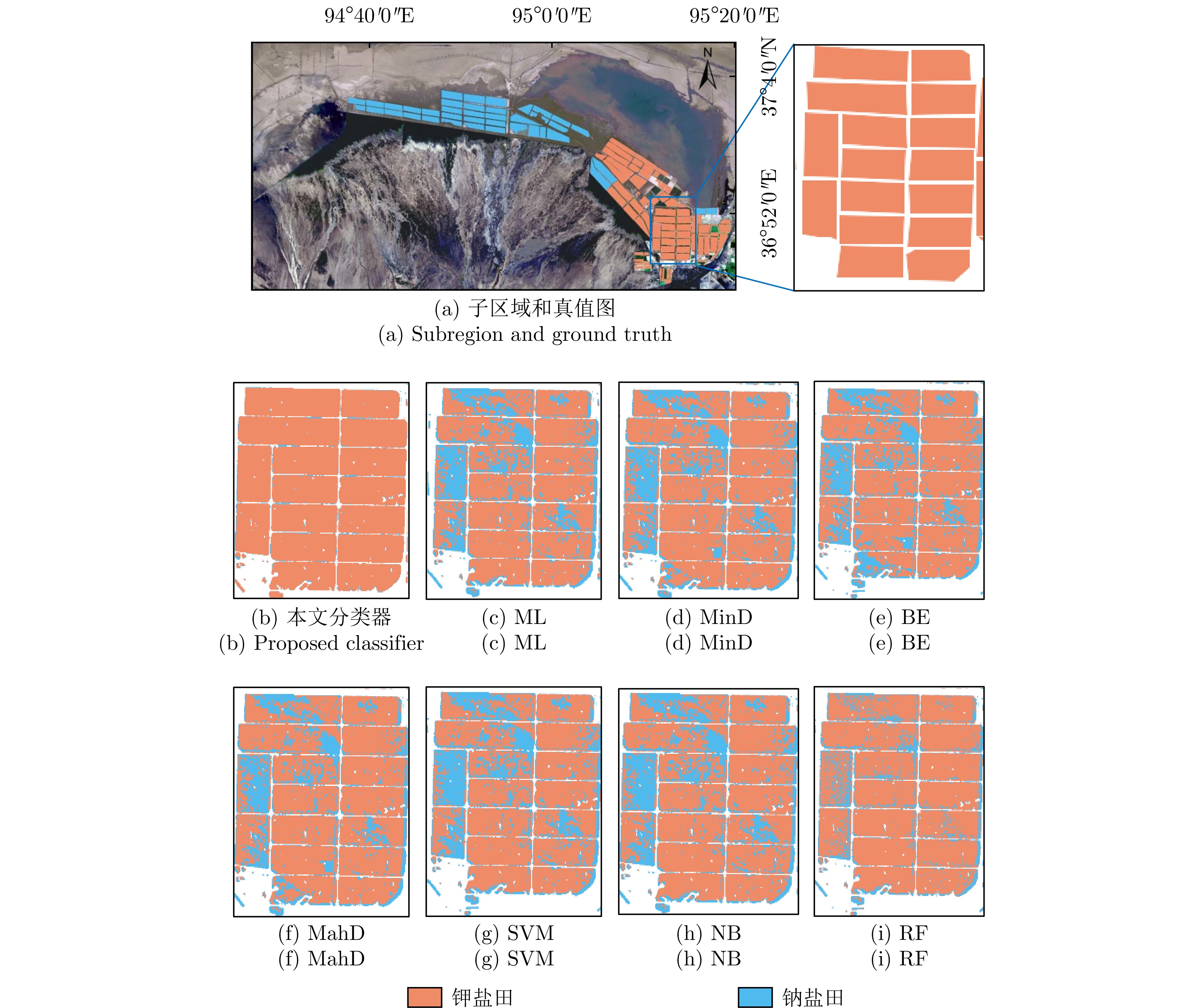
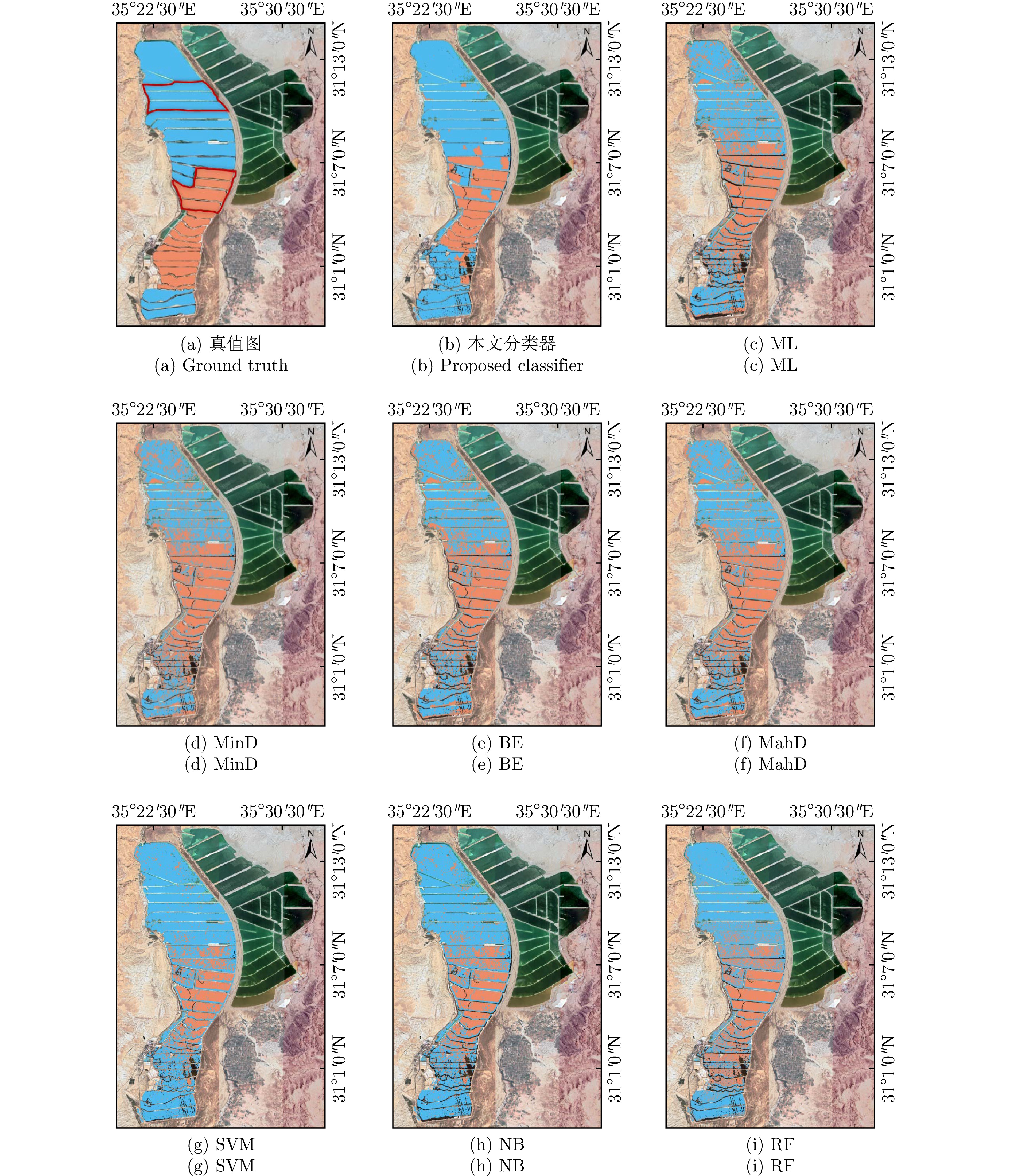
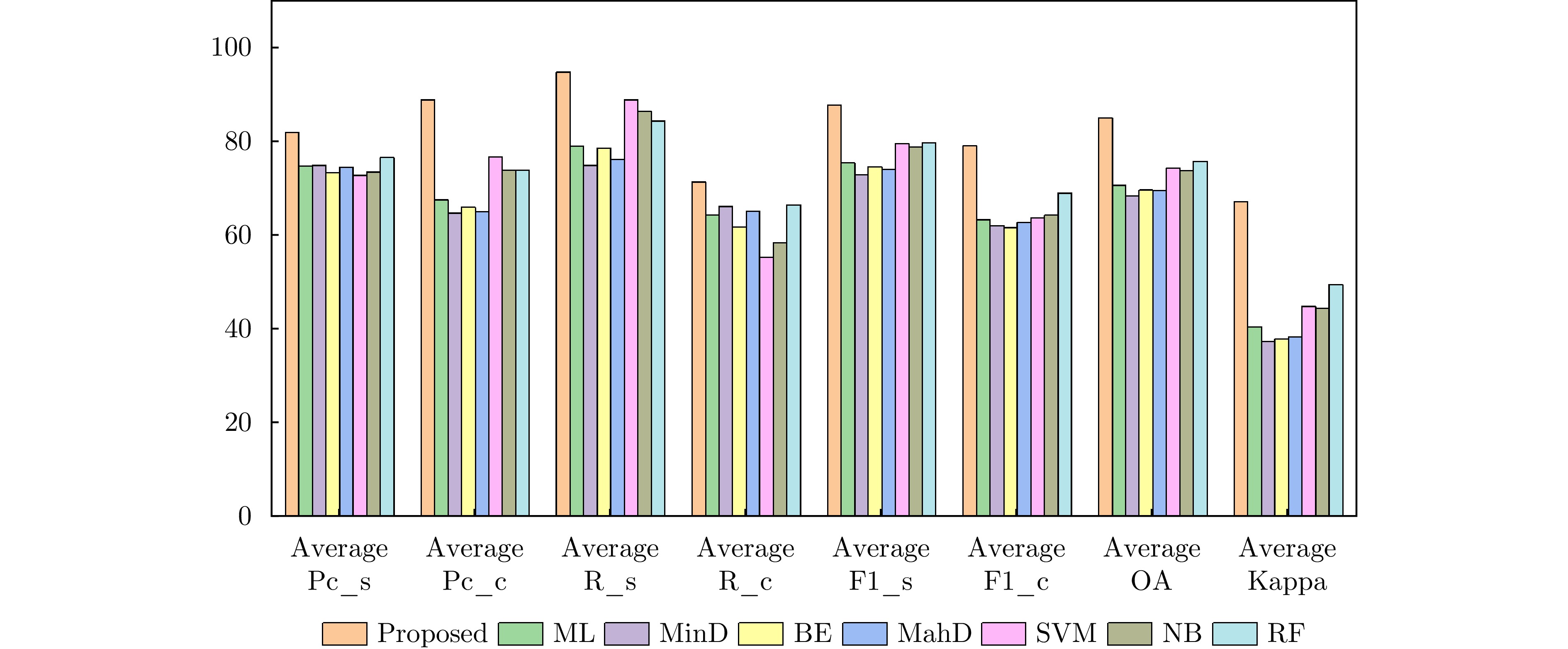
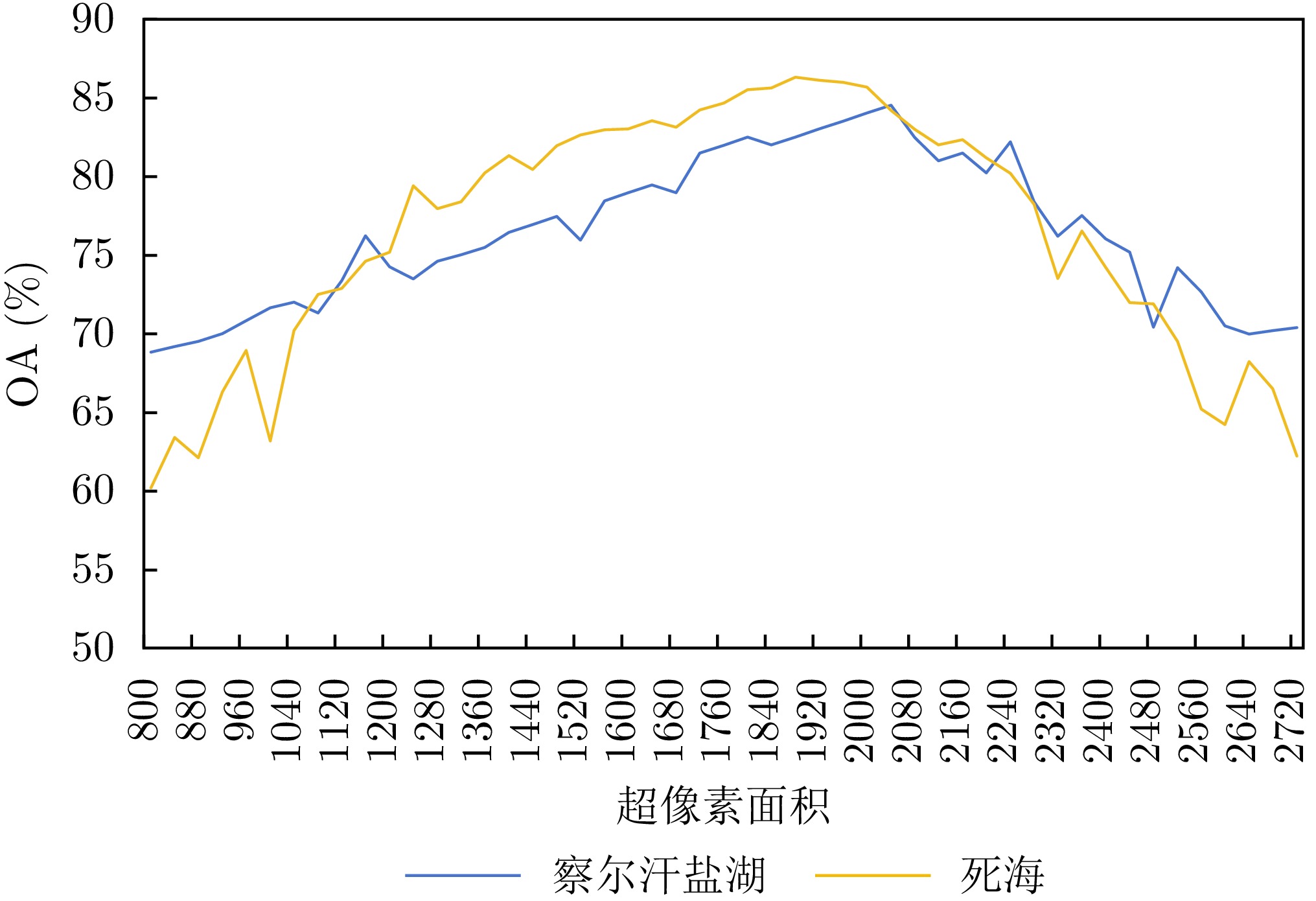
Salt lakes, rich in potassium and lithium mineral resources, are typically mined using the salt field crystallization method. Specifically, brine is first moved to sodium salt fields where sodium salts crystallize, and then it is moved to potassium salt fields for the precipitation of potassium salts. Determining the type of salt field is essential for accurately estimating salt production and ensuring efficient mining operations. Because different types of salt fields exhibit different salt precipitation rates, they also produce distinct variations in scattering intensity that can be observed in multi-temporal Polarimetric Synthetic Aperture Radar (PolSAR) data. To explore this property, this study proposes a salt field classification method based on multi-temporal PolSAR. First, to accurately characterize the long-term scattering variations in salt fields, a new multi-temporal polarization feature, i.e., dominant scattering temporal entropy, is introduced. The main scattering mechanism of the target area is extracted from the polarimetric covariance matrix, from which the temporal correlation between any two PolSAR images is calculated to construct a temporal correlation matrix. The principal change direction and magnitude of scattering variation in land cover across the time series are then obtained from the temporal correlation matrix through diagonalization, and entropy is used to quantify change intensity and provide an accurate measure of cumulative change. Second, this study demonstrates that the dominant scattering temporal entropy follows the Gaussian distribution, enabling the design of a classifier based on Chernoff distance. Classification is performed by comparing the Chernoff distance of entropy probability distributions within superpixels. The proposed method achieves overall classification accuracies of 84.13% and 86.13% on the Qarhan Salt Lake and Dead Sea Sentinel-1 datasets, respectively, representing an improvement of about 10% over existing time-series PolSAR methods. The classification results exhibit superior spatial consistency and noise robustness compared with other methods.
Salt lakes, rich in potassium and lithium mineral resources, are typically mined using the salt field crystallization method. Specifically, brine is first moved to sodium salt fields where sodium salts crystallize, and then it is moved to potassium salt fields for the precipitation of potassium salts. Determining the type of salt field is essential for accurately estimating salt production and ensuring efficient mining operations. Because different types of salt fields exhibit different salt precipitation rates, they also produce distinct variations in scattering intensity that can be observed in multi-temporal Polarimetric Synthetic Aperture Radar (PolSAR) data. To explore this property, this study proposes a salt field classification method based on multi-temporal PolSAR. First, to accurately characterize the long-term scattering variations in salt fields, a new multi-temporal polarization feature, i.e., dominant scattering temporal entropy, is introduced. The main scattering mechanism of the target area is extracted from the polarimetric covariance matrix, from which the temporal correlation between any two PolSAR images is calculated to construct a temporal correlation matrix. The principal change direction and magnitude of scattering variation in land cover across the time series are then obtained from the temporal correlation matrix through diagonalization, and entropy is used to quantify change intensity and provide an accurate measure of cumulative change. Second, this study demonstrates that the dominant scattering temporal entropy follows the Gaussian distribution, enabling the design of a classifier based on Chernoff distance. Classification is performed by comparing the Chernoff distance of entropy probability distributions within superpixels. The proposed method achieves overall classification accuracies of 84.13% and 86.13% on the Qarhan Salt Lake and Dead Sea Sentinel-1 datasets, respectively, representing an improvement of about 10% over existing time-series PolSAR methods. The classification results exhibit superior spatial consistency and noise robustness compared with other methods.
2026,
15(2):
543-562.
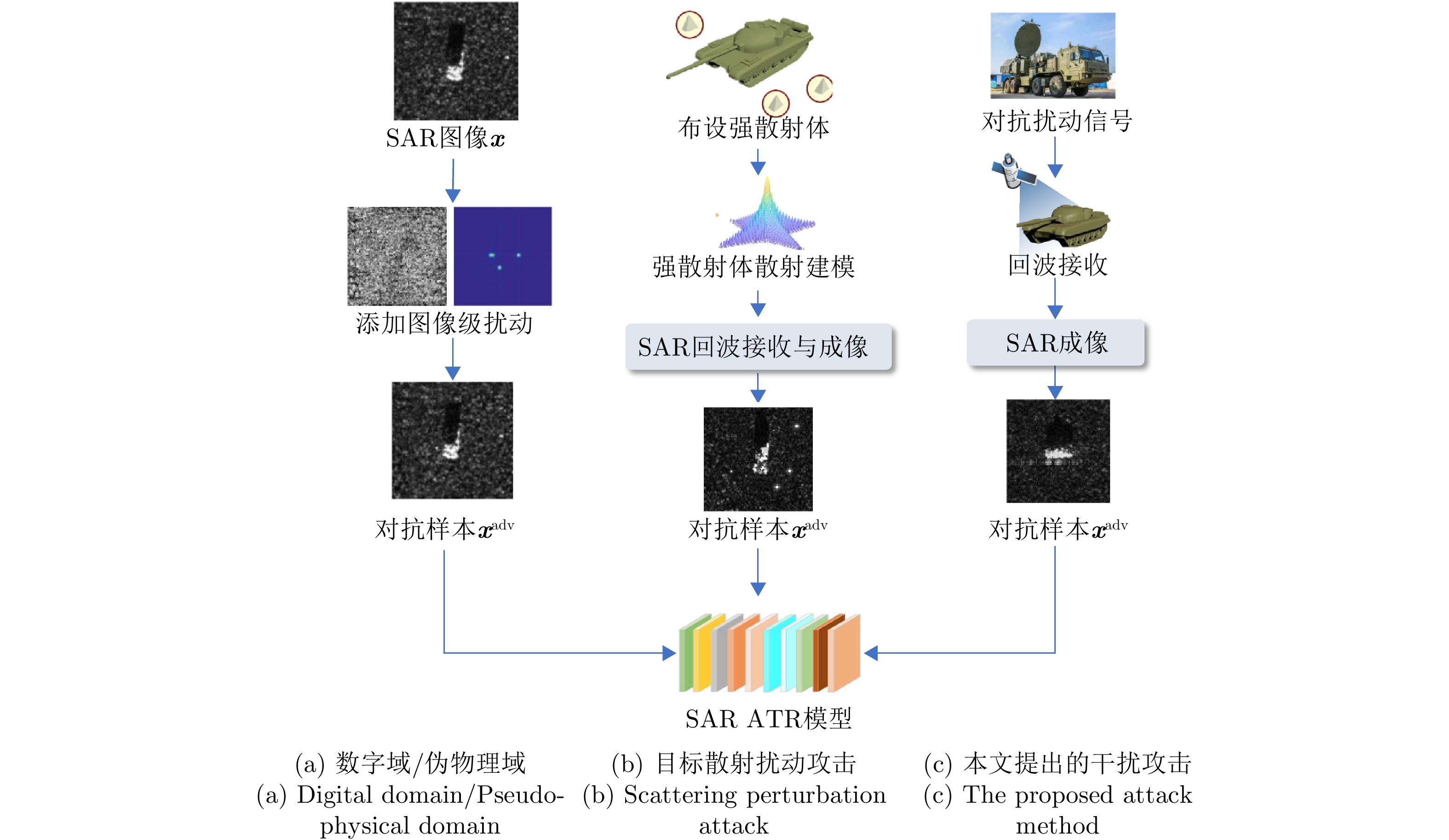
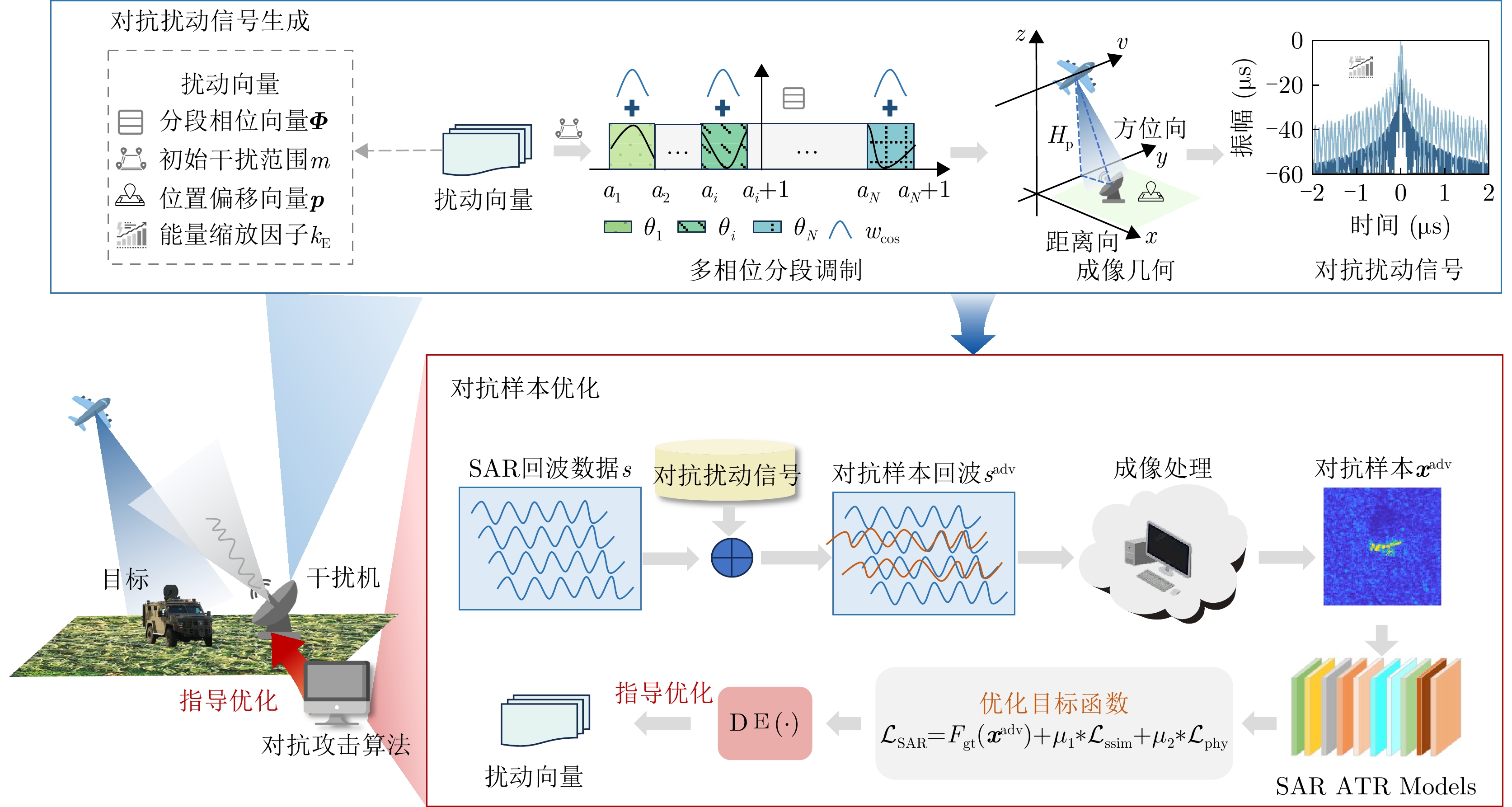
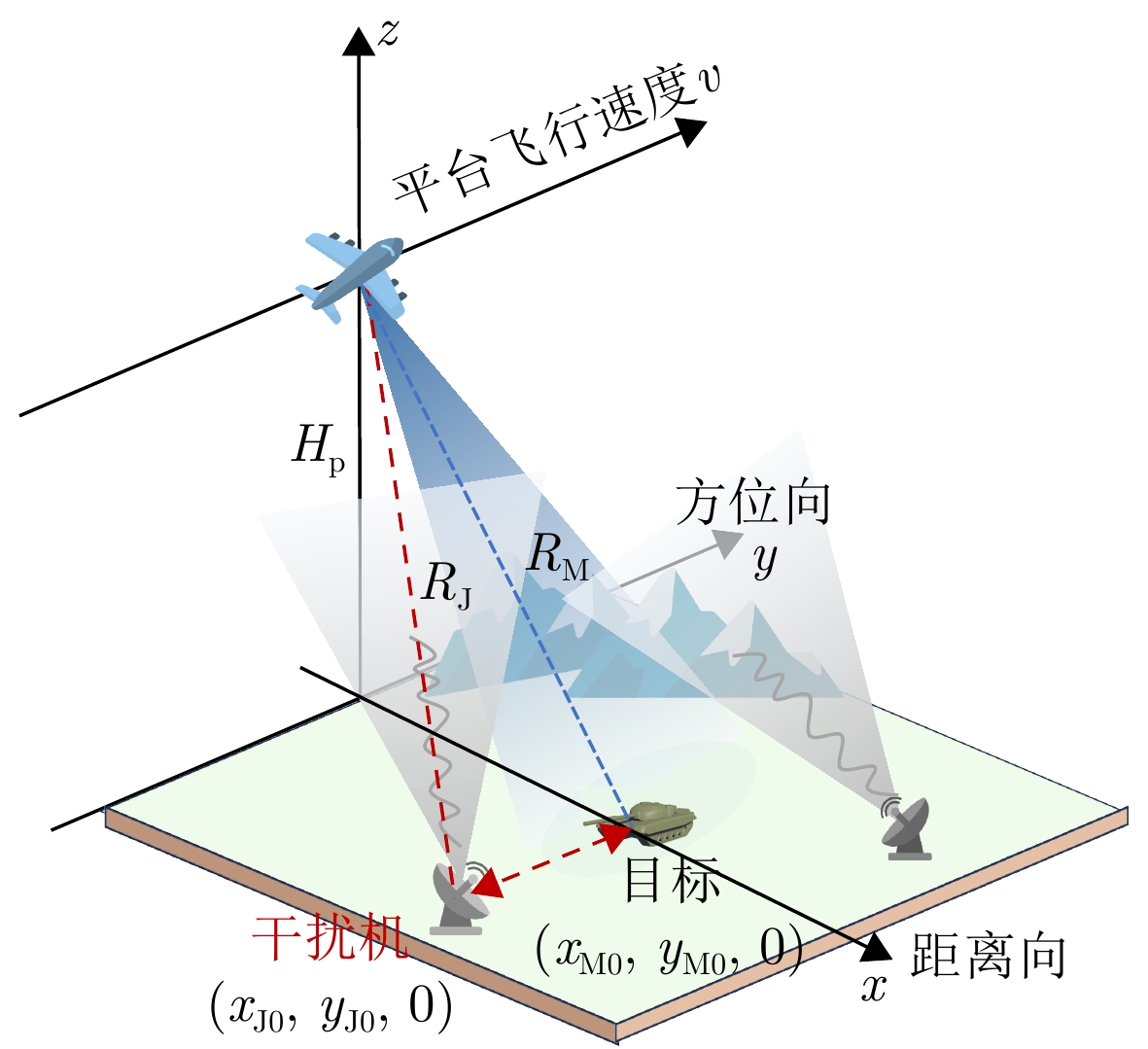
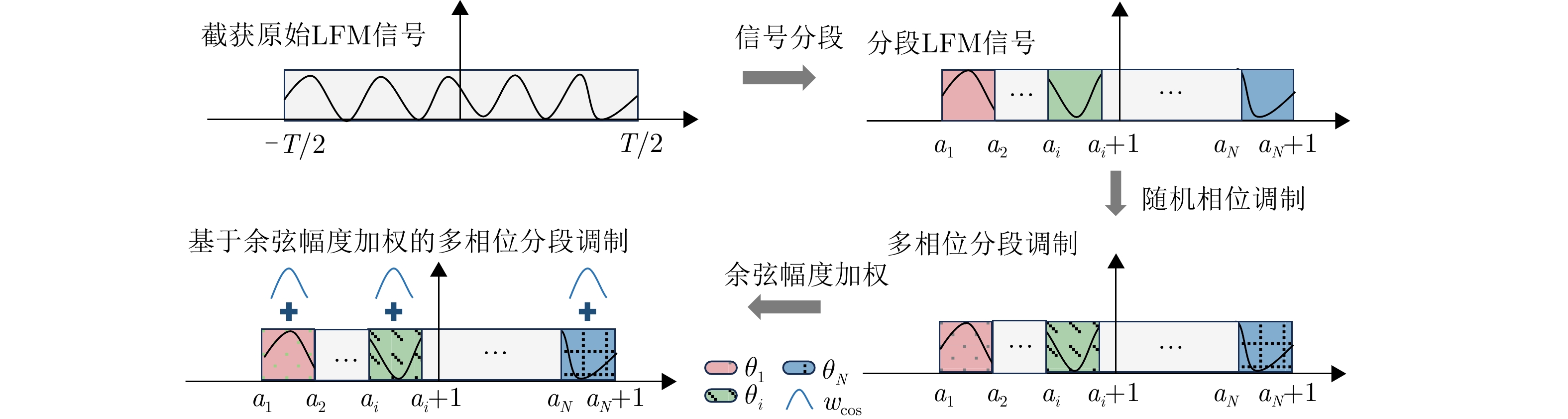
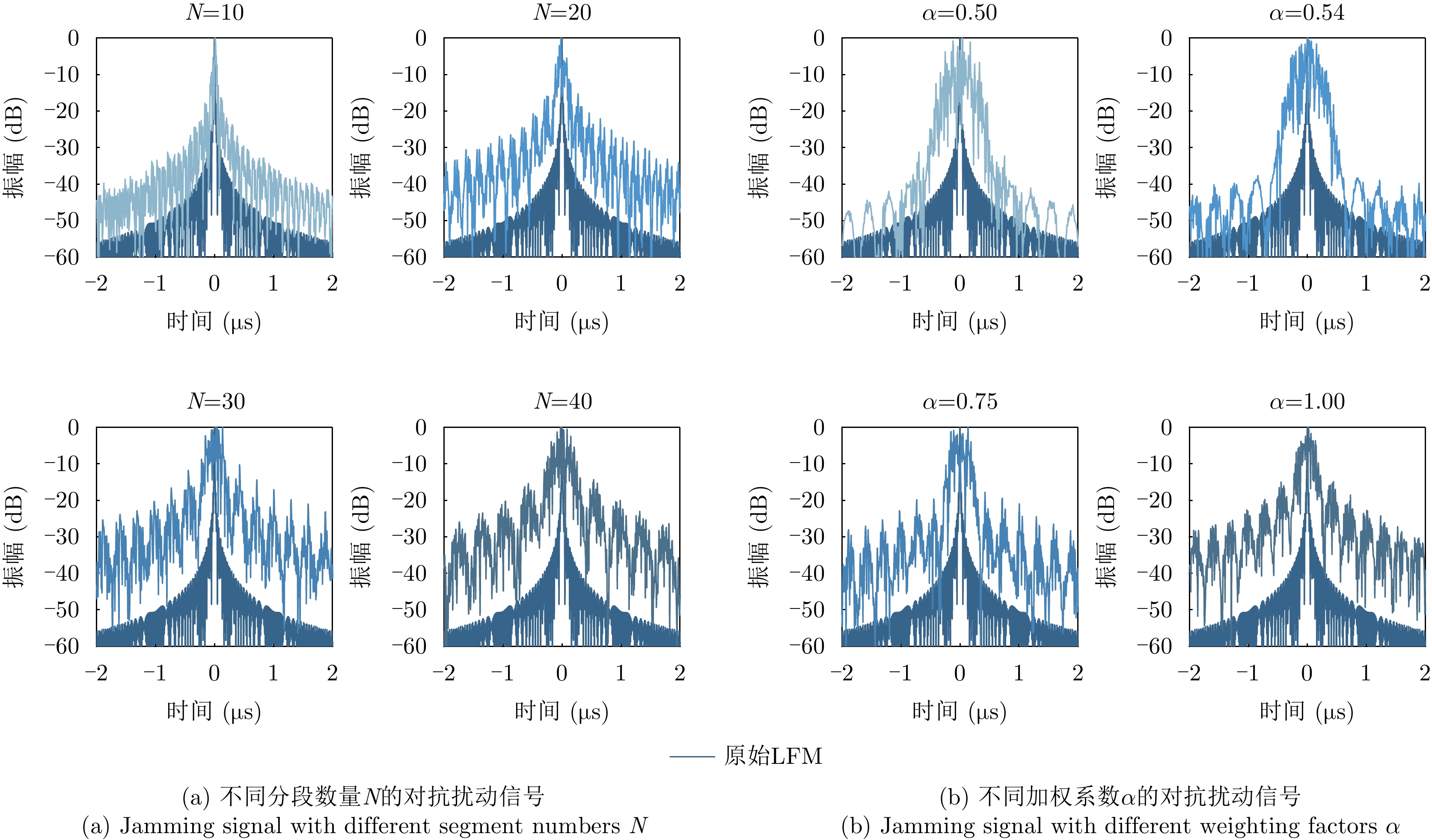
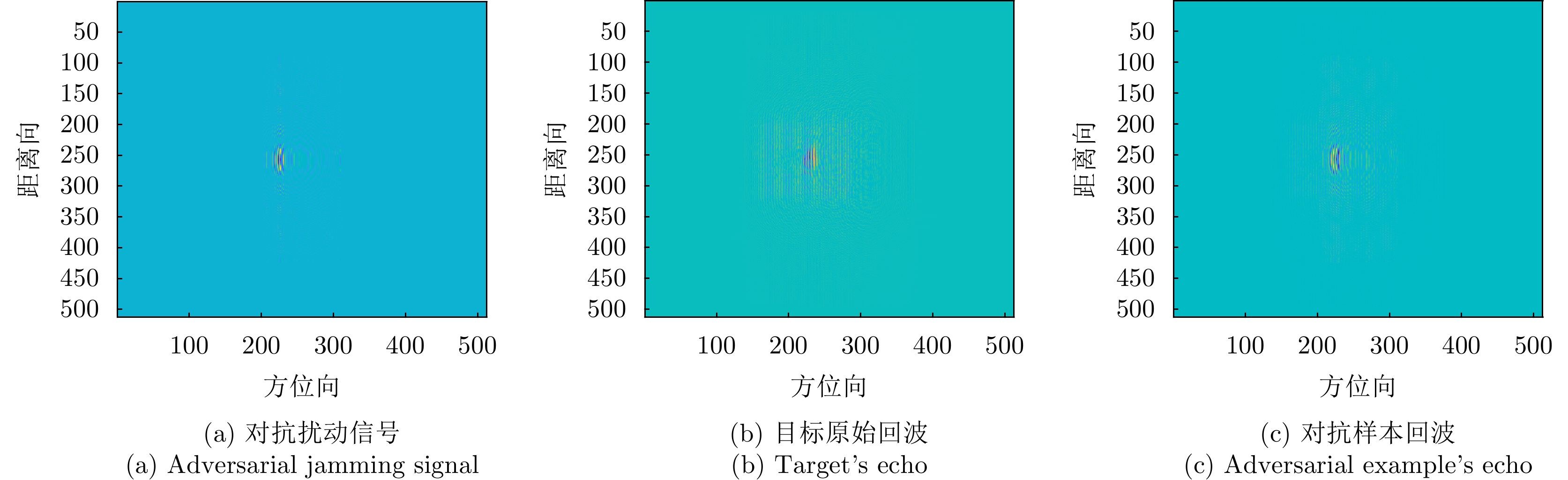
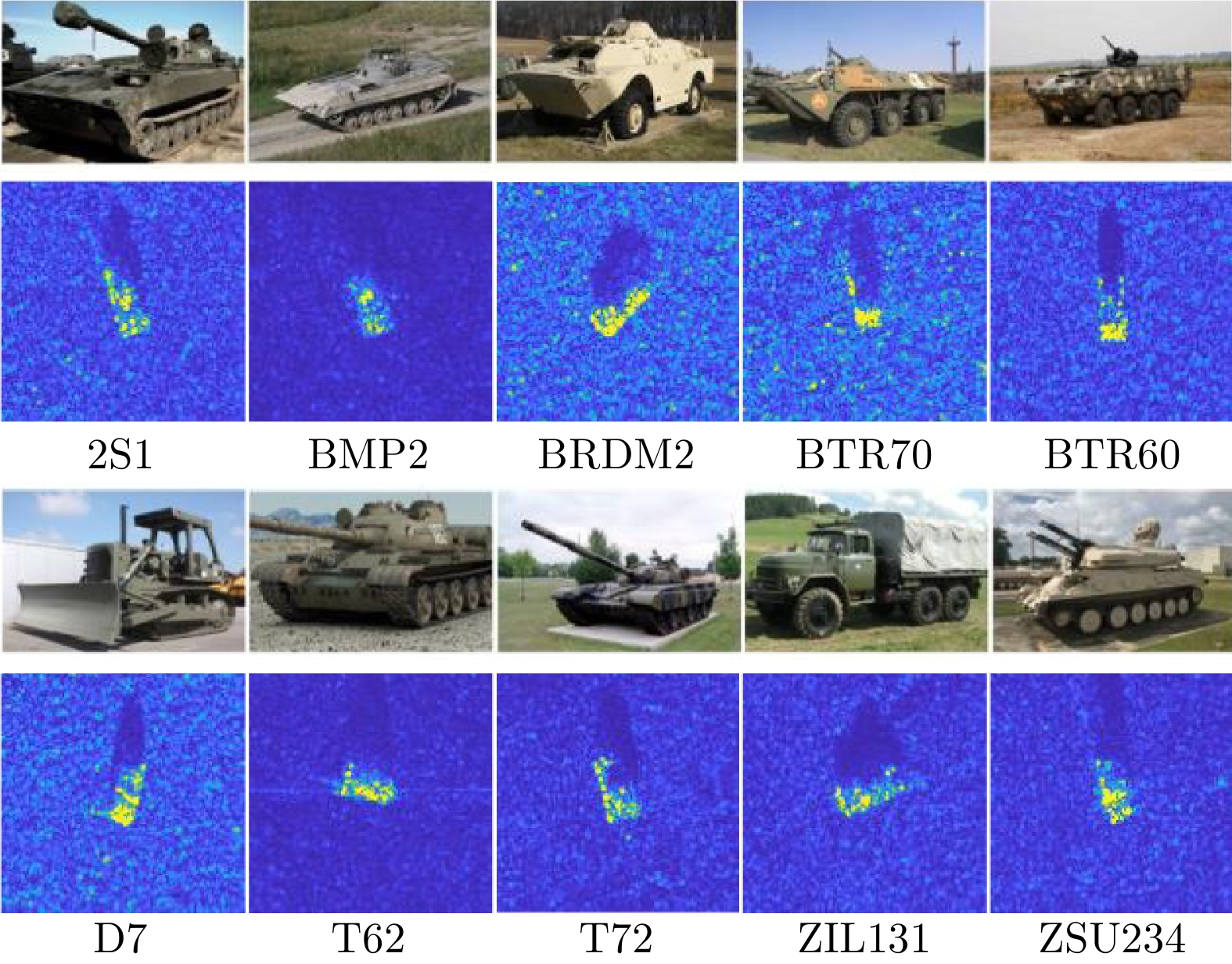
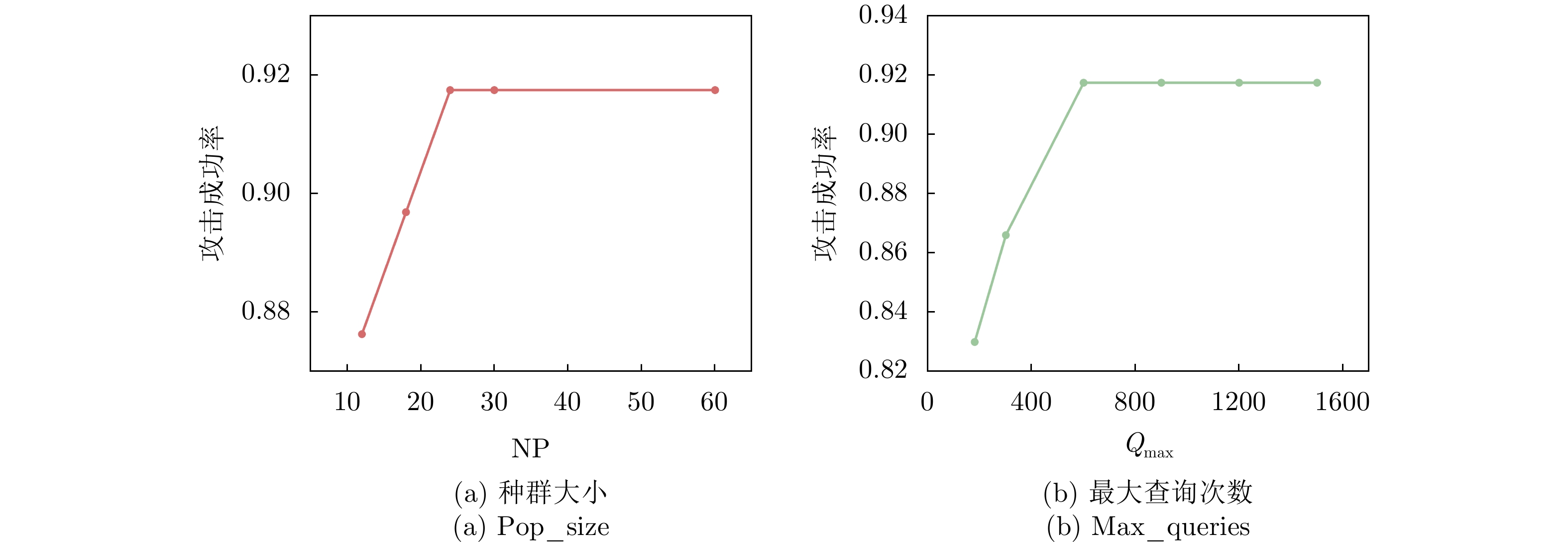
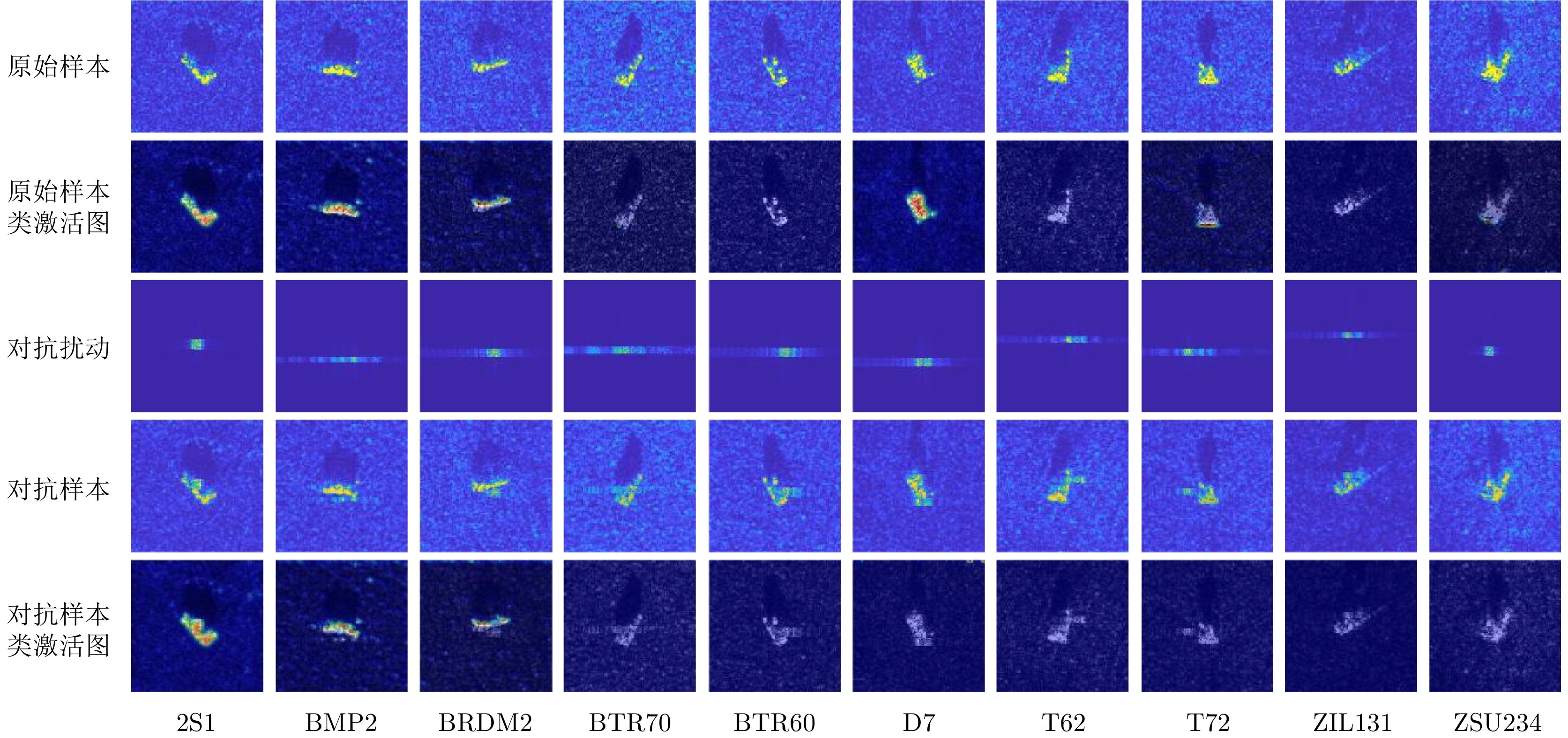
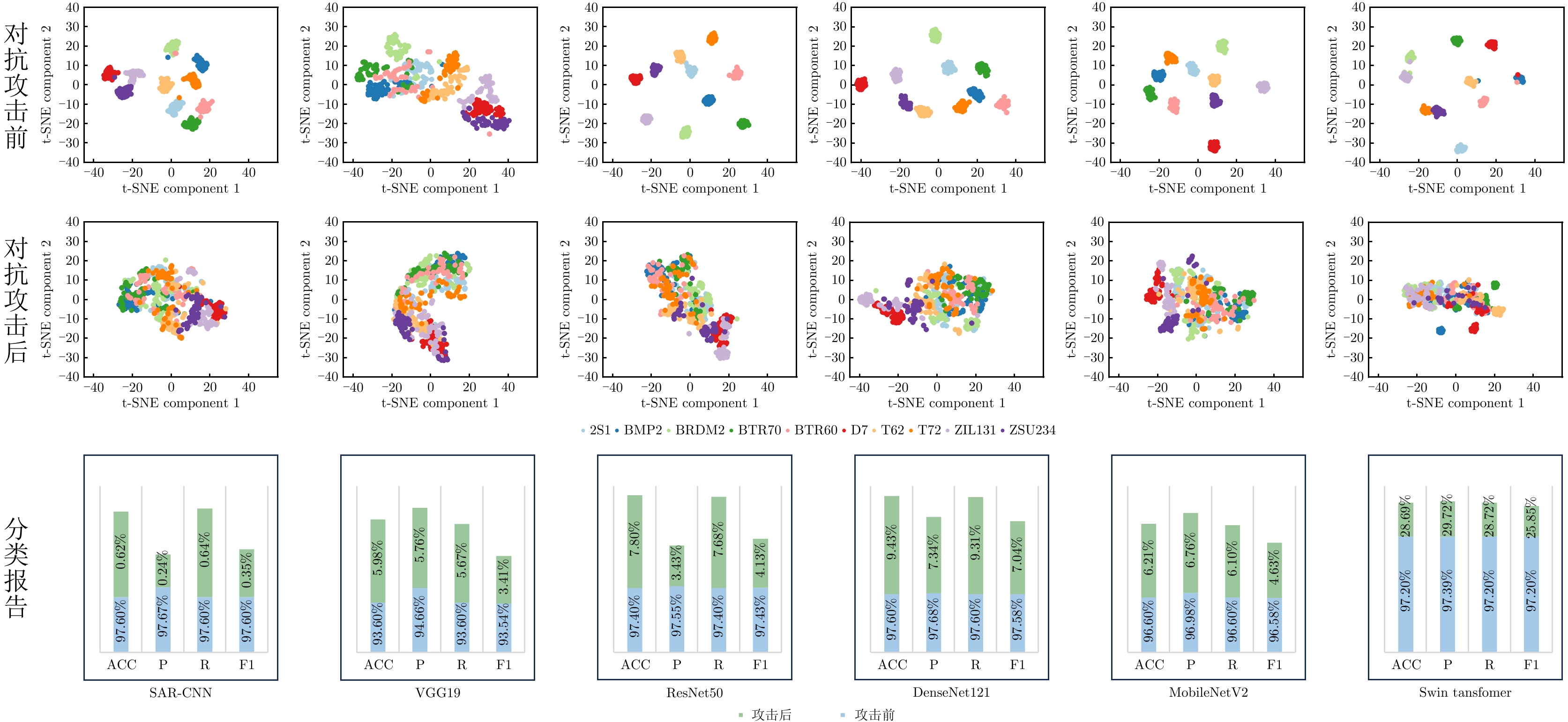
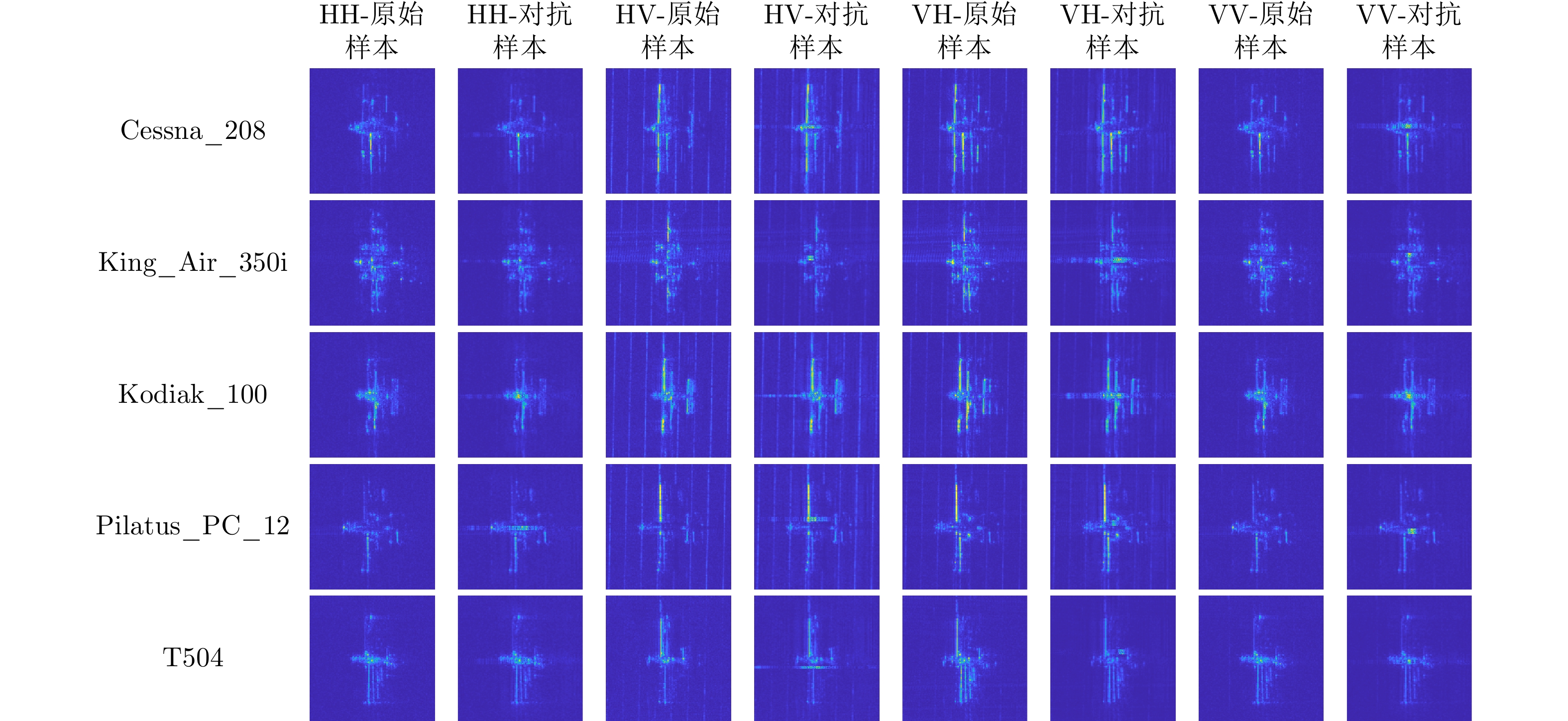
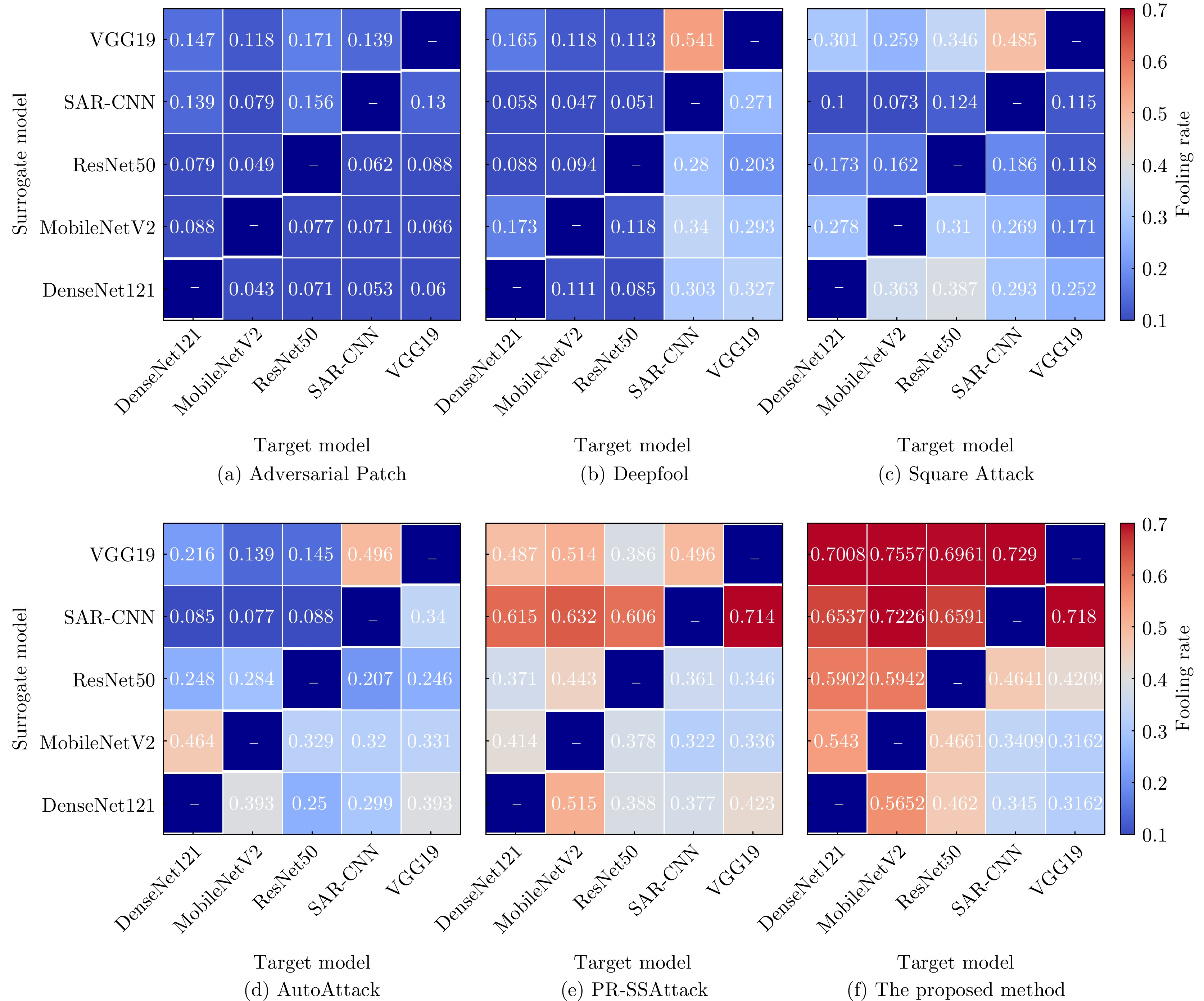
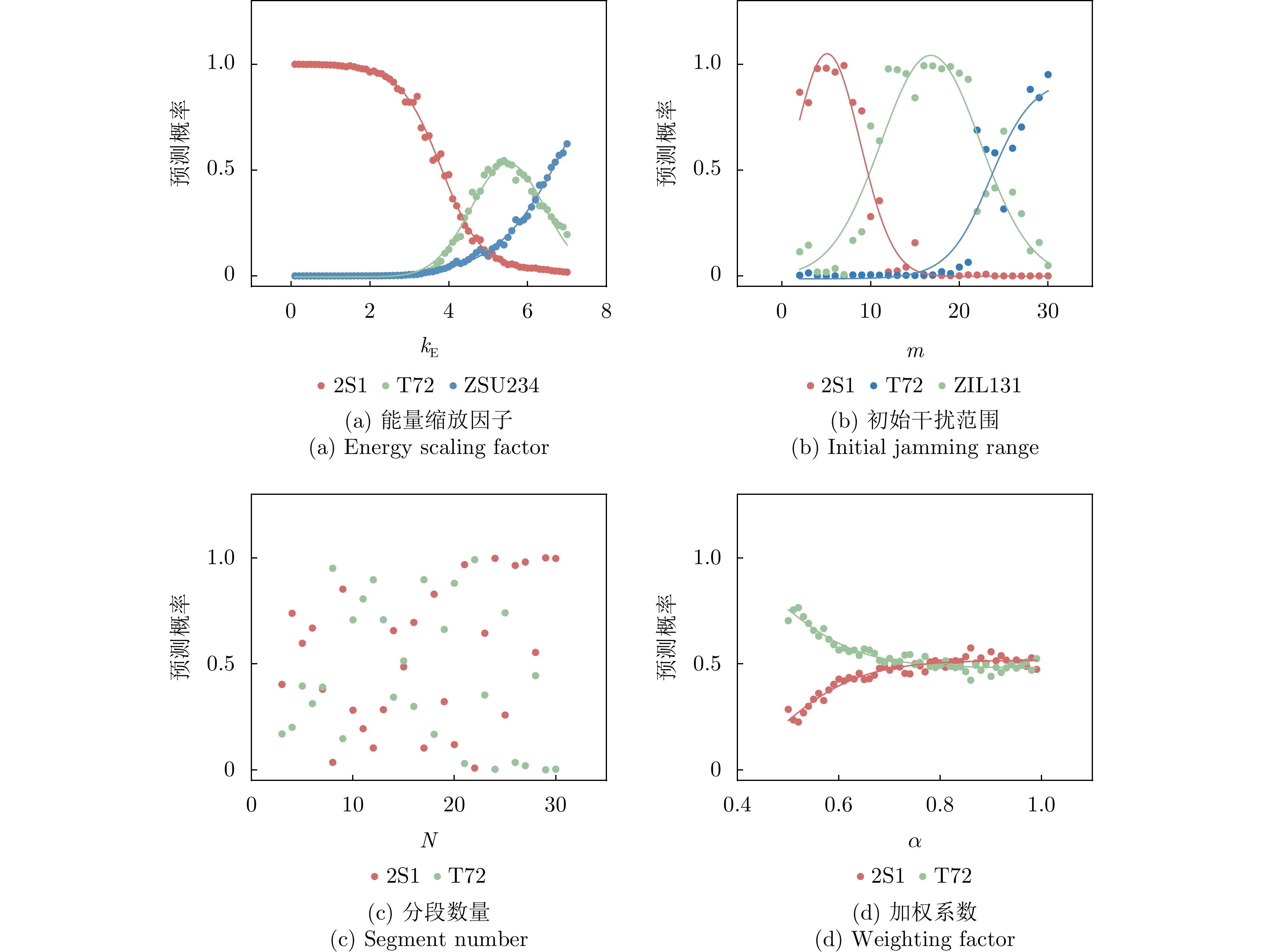
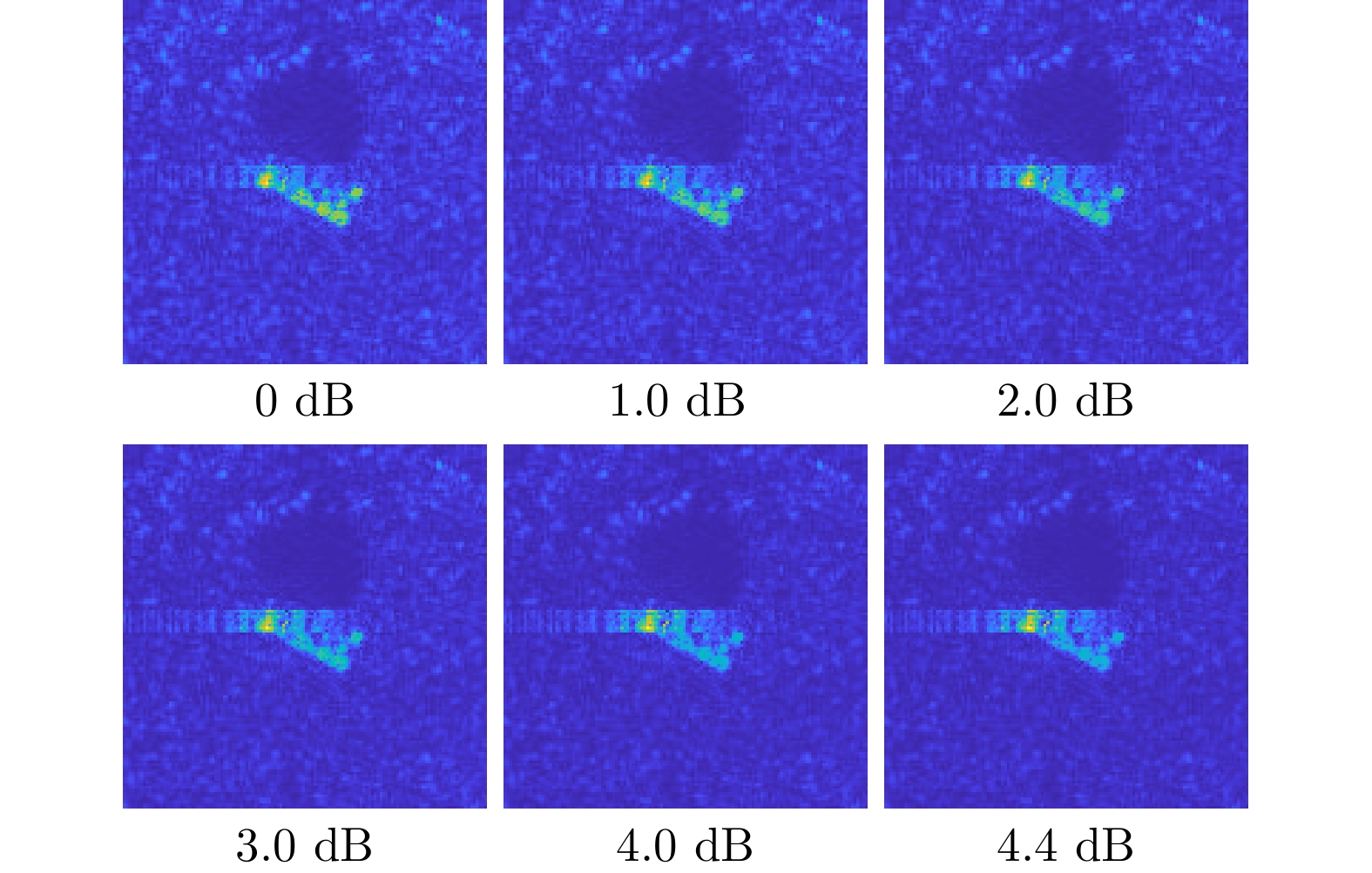
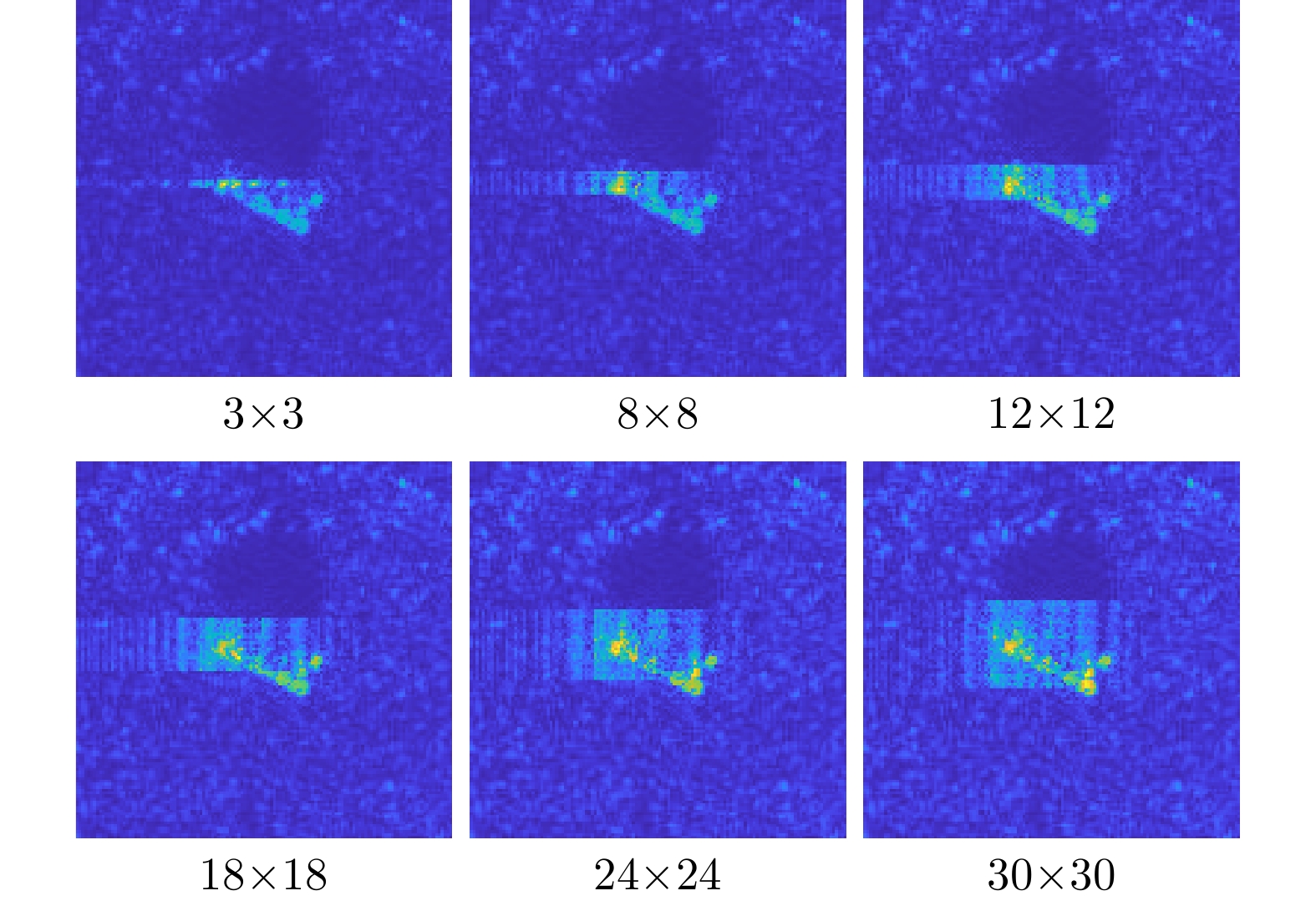
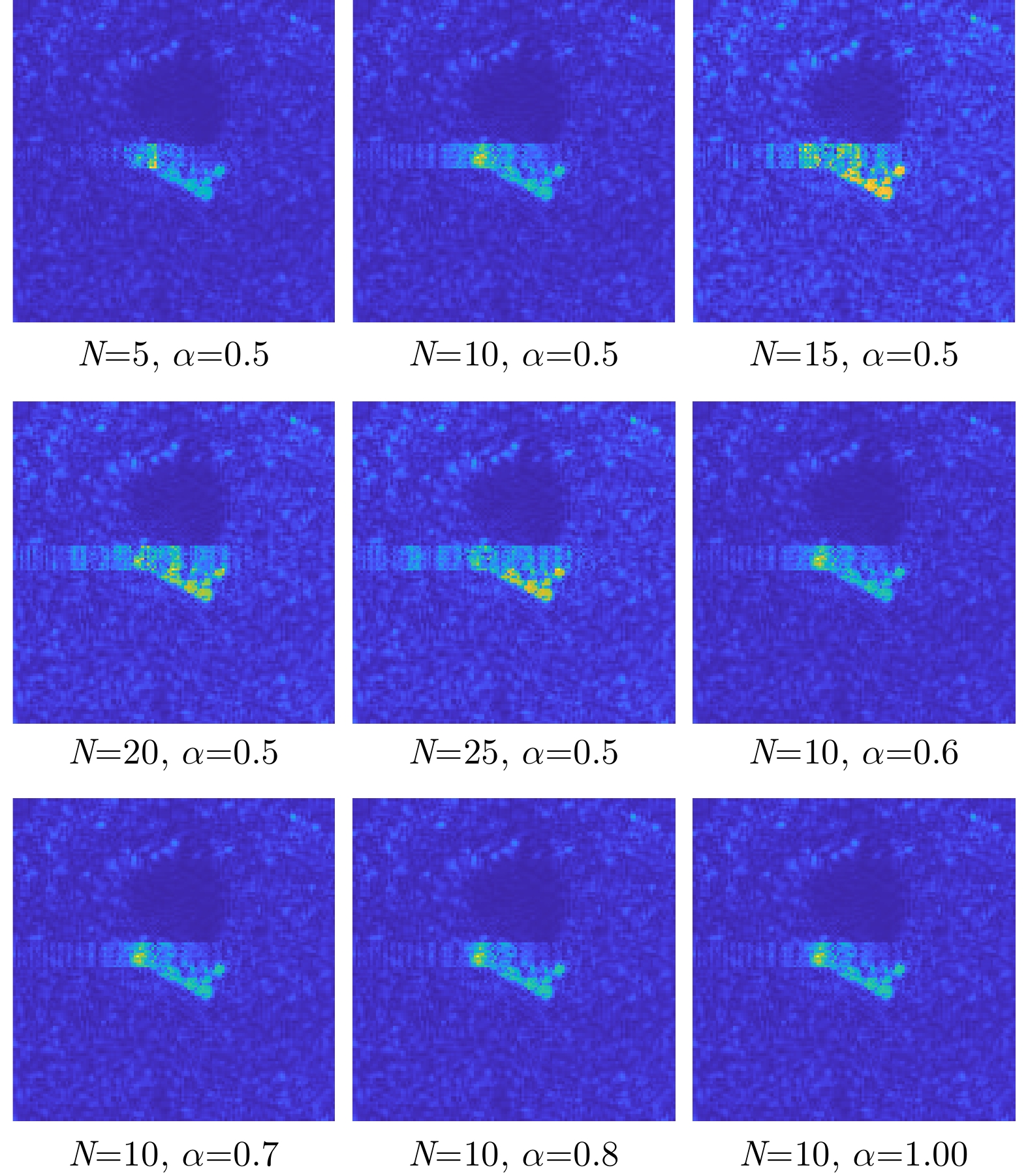
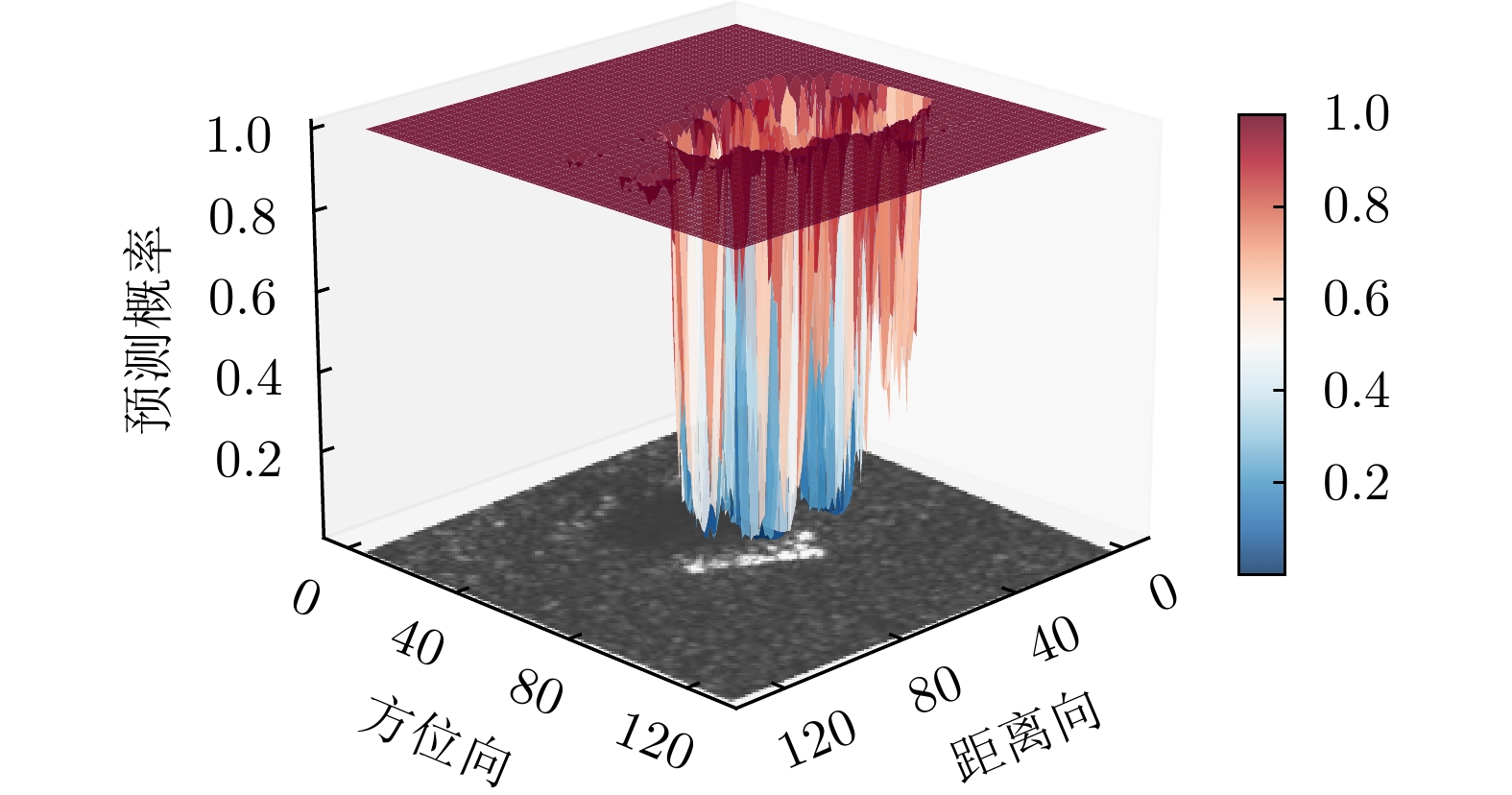
The effective utilization of Synthetic Aperture Radar (SAR) adversarial examples enables specific targets to achieve remote sensing stealth against intelligent detection systems, thereby evading detection and recognition by adversaries. Digital domain SAR adversarial methods, which operate exclusively in the image domain, produce adversarial images that are not physically realizable and therefore cannot generated by real SAR imaging systems. Existing physical domain approaches typically involve deploying corner reflectors or electromagnetic metasurfaces around targets and simulating adversarial examples using via computational electromagnetics. However, the limited accuracy of scattering estimation often constrains the practical protective efficacy of these methods. To overcome these limitations, this paper proposes an active jammer-based adversarial attack method that integrates SAR active jamming technology with adversarial attack methods to generate adversarial examples by perturbing the target’s echo signals in the signal domain. First, a multiple-phase sectionalized modulation jamming method based on cosine amplitude weighting is selected, enabling parameterized control of the adversarial jamming signal through the design of perturbation components. Next, the adversarial jamming signal generated by the active jammer is fused with the target’s echo signal according to the principles and actual processes of SAR imaging and is then subjected to imaging processing to produce physically realizable SAR adversarial examples. Finally, the differential evolution algorithm is employed to dynamically adjust parameters, such as the energy distribution and jamming range of the adversarial jamming signal, thereby optimizing the SAR adversarial examples to achieve optimal attack success rates even with minimal interference intensity. Experimental results on the MSTAR dataset, a widely used benchmark in the field of SAR Automatic Target Recognition (ATR), show that the proposed method achieves an average fooling rate of 90.88% and demonstrates superior transferability across five different SAR ATR models, with the highest transfer fooling rate reaching 75.57%. Overall, the proposed method generates more physically realizable adversarial examples compared with existing digital domain methods, effectively protecting specific targets in remote sensing detection and providing guidance for the practical application of active jamming signals in real-world scenarios.
The effective utilization of Synthetic Aperture Radar (SAR) adversarial examples enables specific targets to achieve remote sensing stealth against intelligent detection systems, thereby evading detection and recognition by adversaries. Digital domain SAR adversarial methods, which operate exclusively in the image domain, produce adversarial images that are not physically realizable and therefore cannot generated by real SAR imaging systems. Existing physical domain approaches typically involve deploying corner reflectors or electromagnetic metasurfaces around targets and simulating adversarial examples using via computational electromagnetics. However, the limited accuracy of scattering estimation often constrains the practical protective efficacy of these methods. To overcome these limitations, this paper proposes an active jammer-based adversarial attack method that integrates SAR active jamming technology with adversarial attack methods to generate adversarial examples by perturbing the target’s echo signals in the signal domain. First, a multiple-phase sectionalized modulation jamming method based on cosine amplitude weighting is selected, enabling parameterized control of the adversarial jamming signal through the design of perturbation components. Next, the adversarial jamming signal generated by the active jammer is fused with the target’s echo signal according to the principles and actual processes of SAR imaging and is then subjected to imaging processing to produce physically realizable SAR adversarial examples. Finally, the differential evolution algorithm is employed to dynamically adjust parameters, such as the energy distribution and jamming range of the adversarial jamming signal, thereby optimizing the SAR adversarial examples to achieve optimal attack success rates even with minimal interference intensity. Experimental results on the MSTAR dataset, a widely used benchmark in the field of SAR Automatic Target Recognition (ATR), show that the proposed method achieves an average fooling rate of 90.88% and demonstrates superior transferability across five different SAR ATR models, with the highest transfer fooling rate reaching 75.57%. Overall, the proposed method generates more physically realizable adversarial examples compared with existing digital domain methods, effectively protecting specific targets in remote sensing detection and providing guidance for the practical application of active jamming signals in real-world scenarios.


2026,
15(2):
563-582.
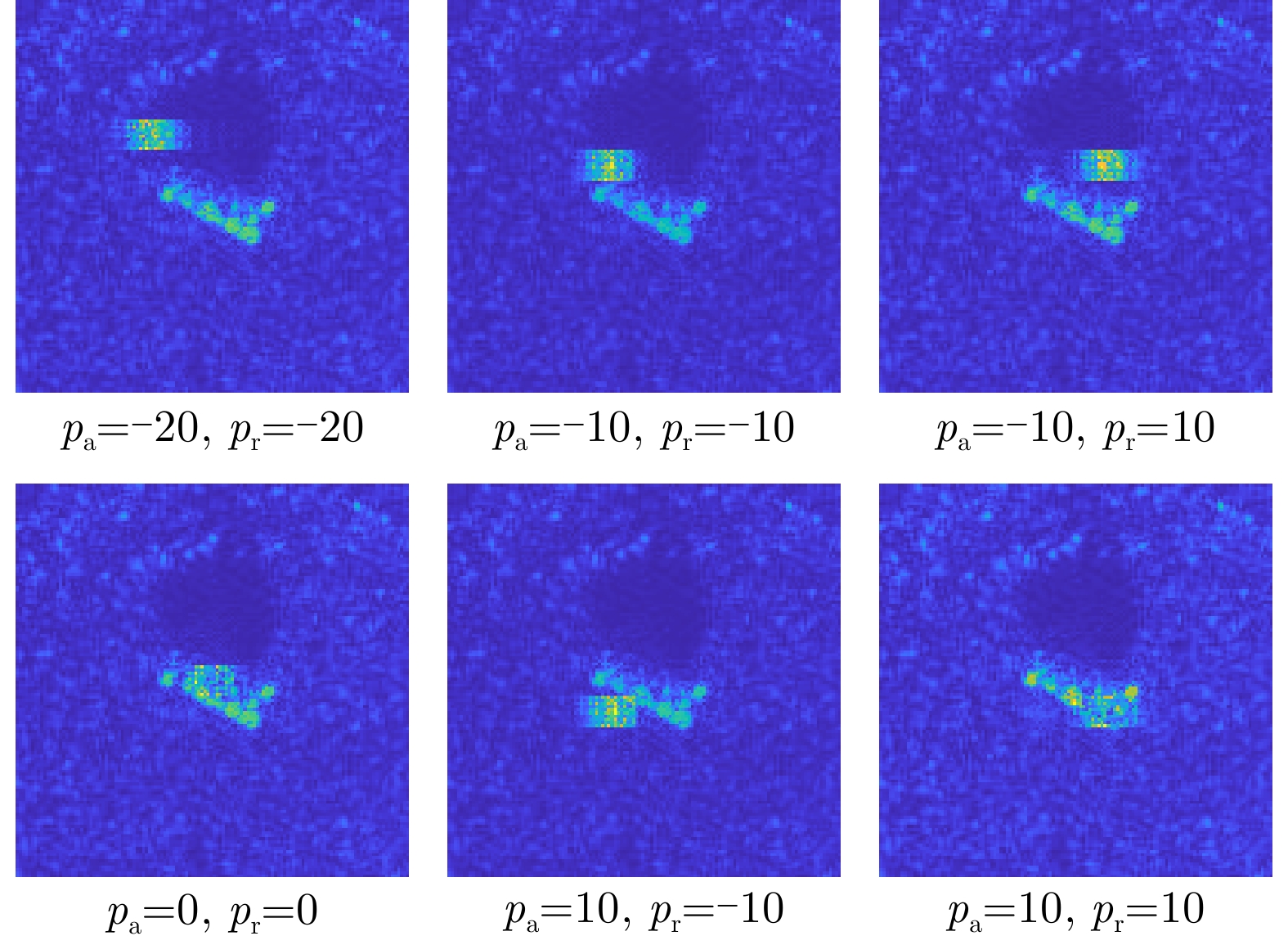
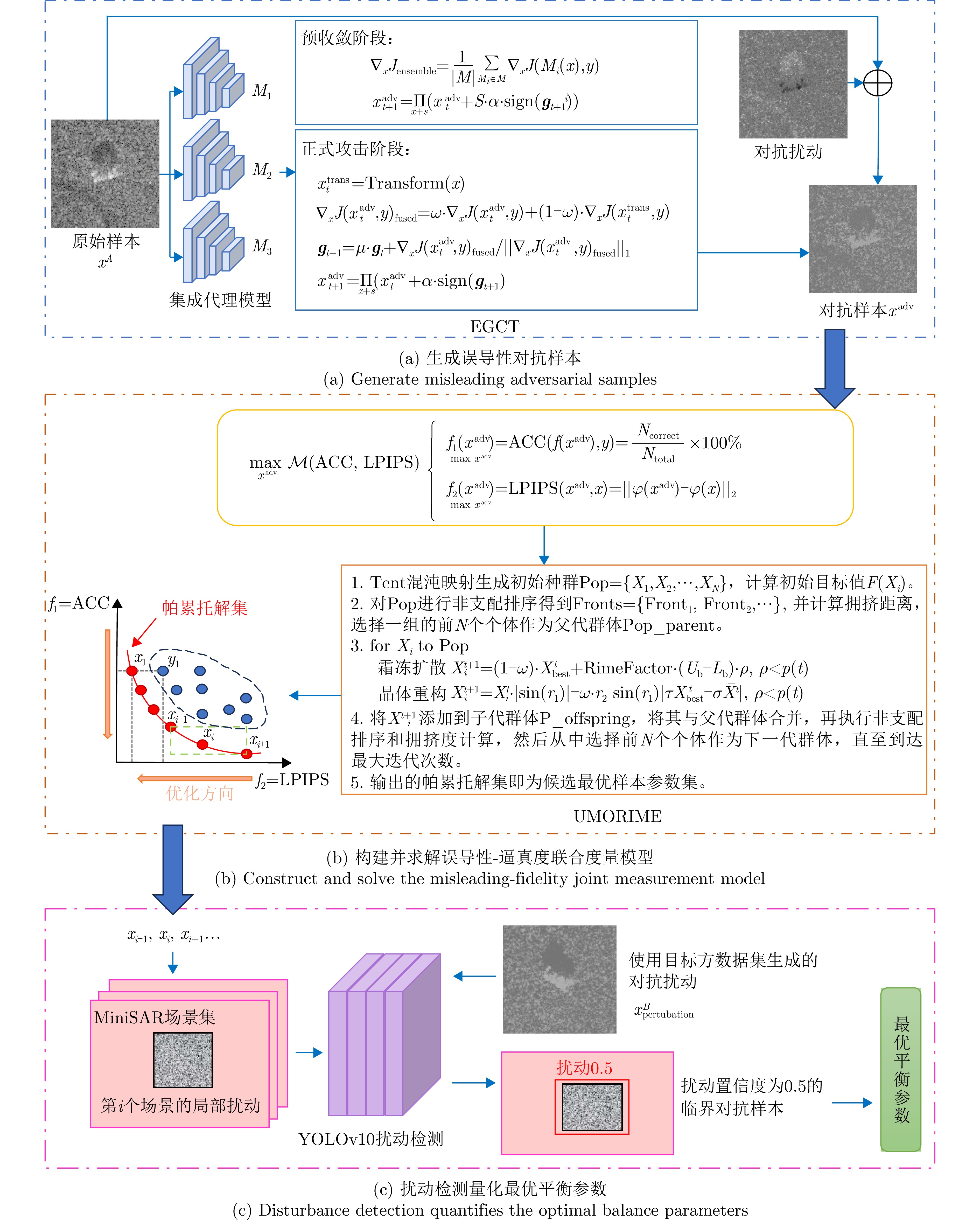
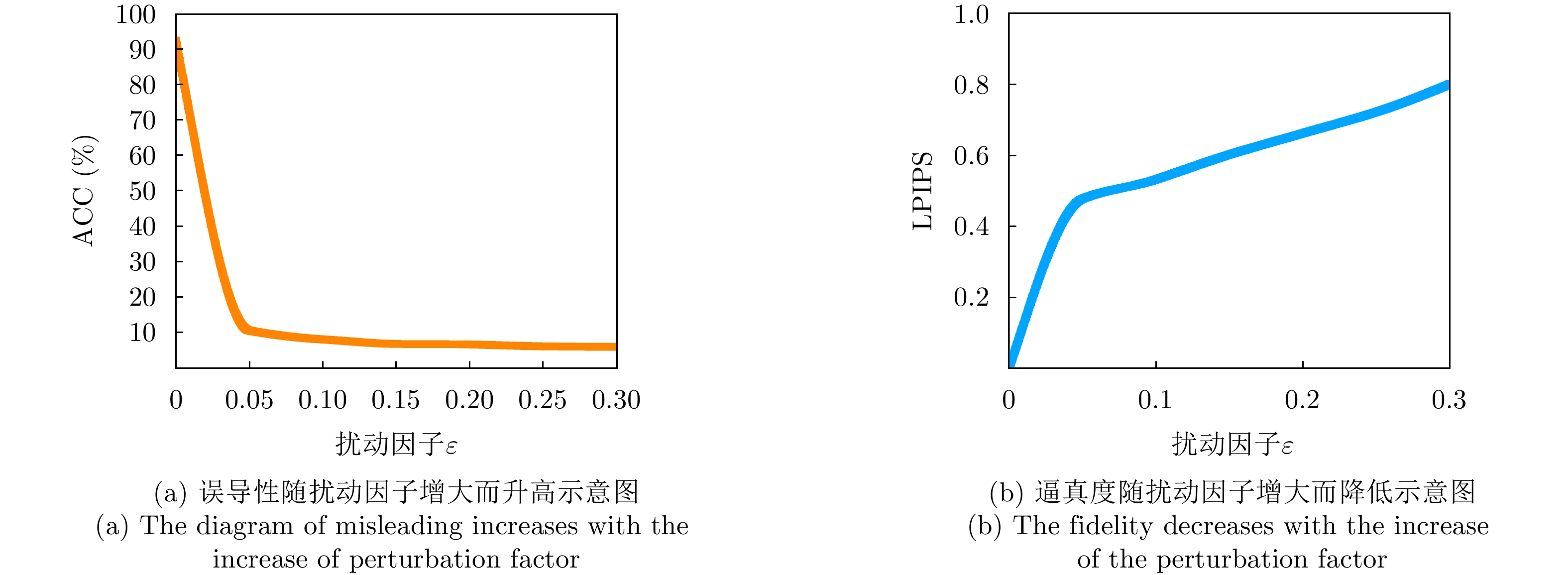
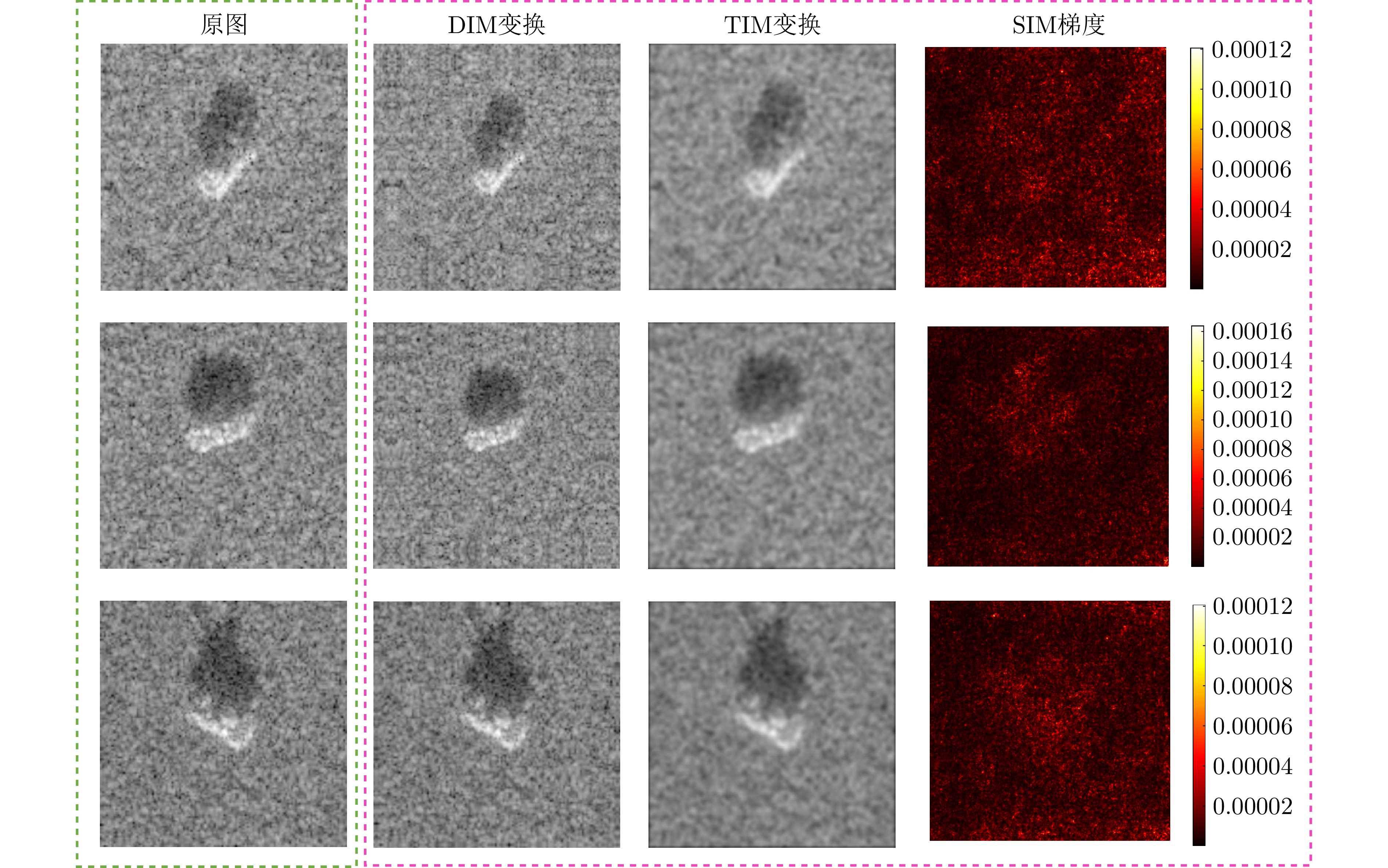
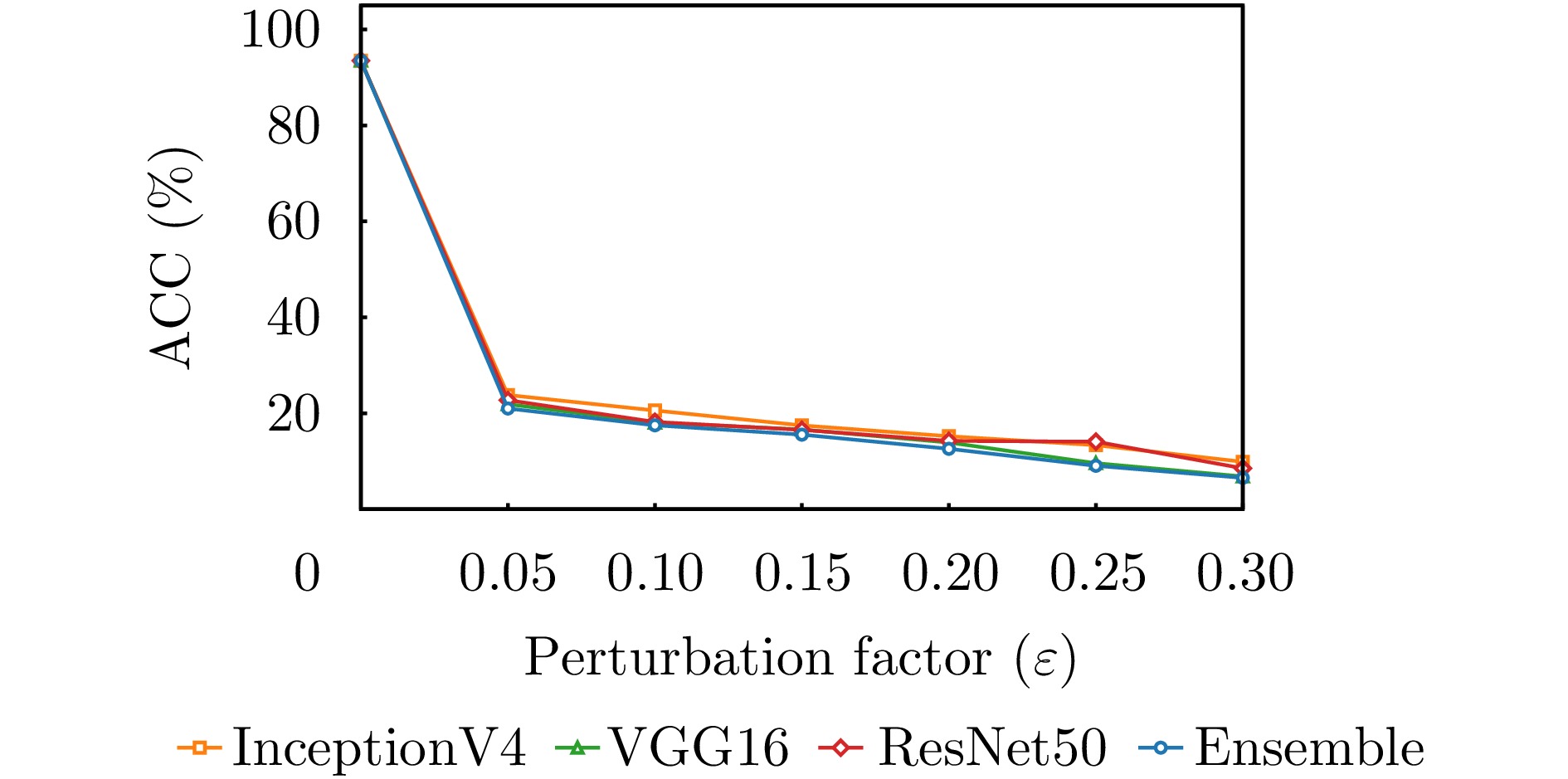
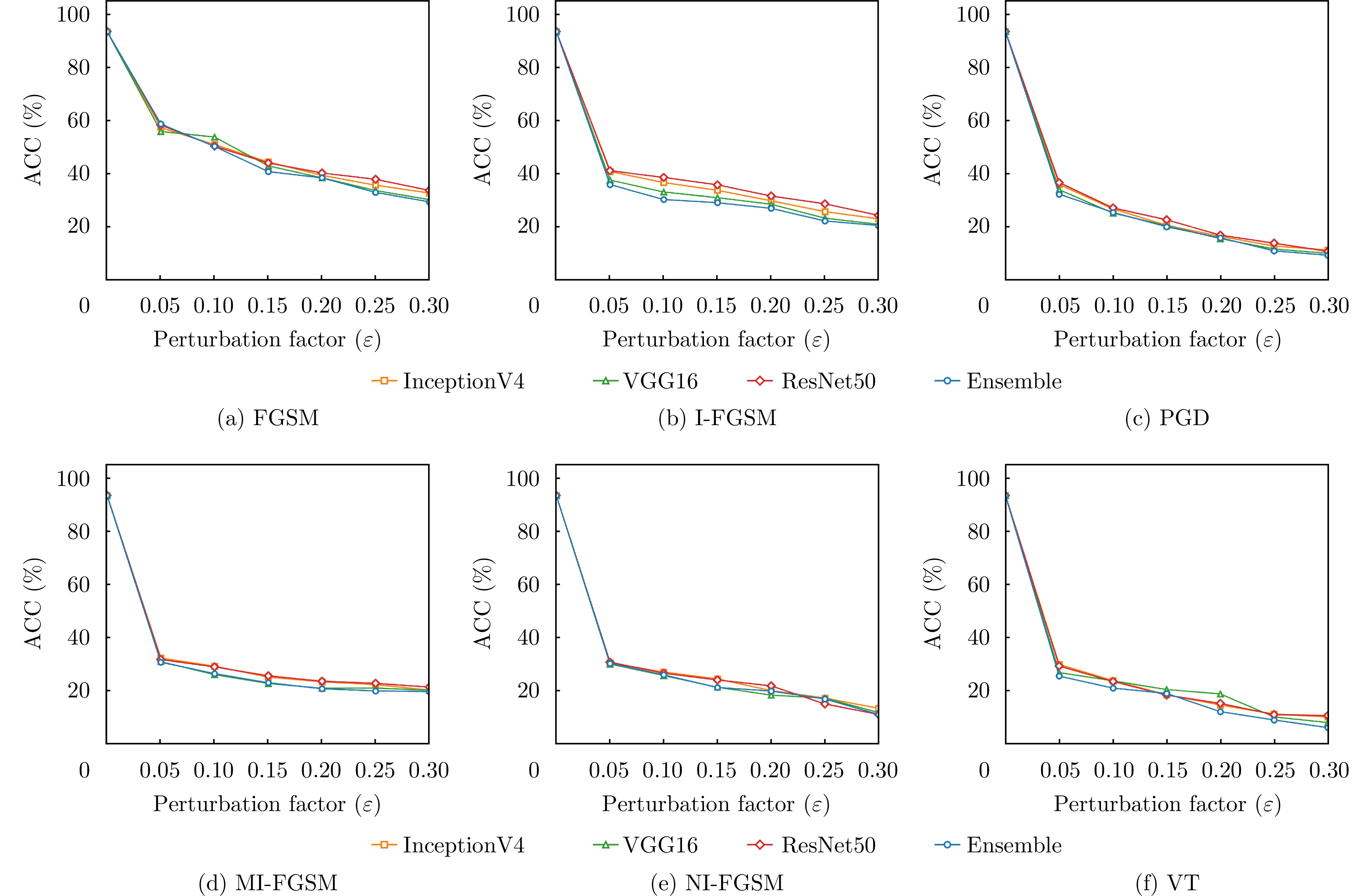
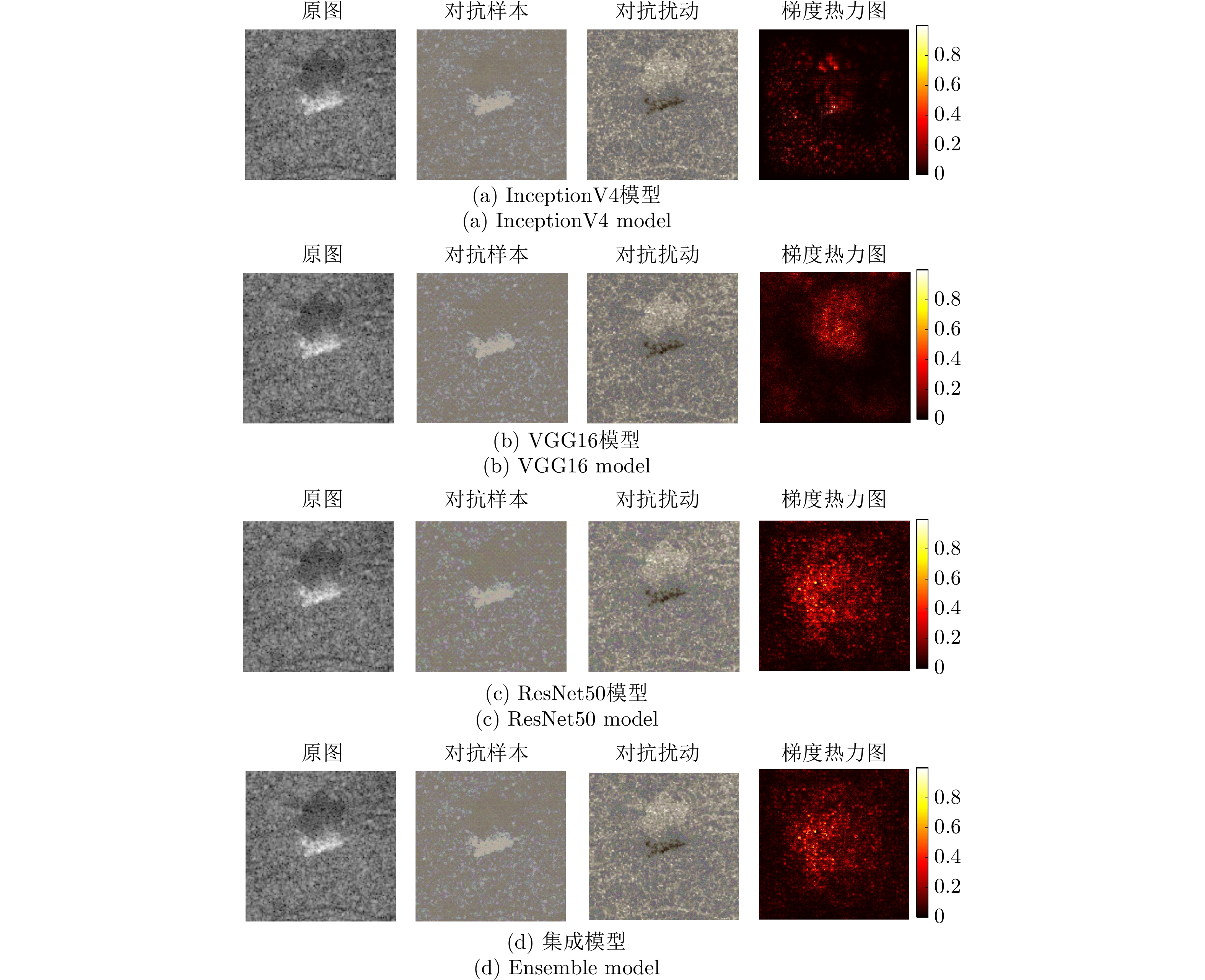
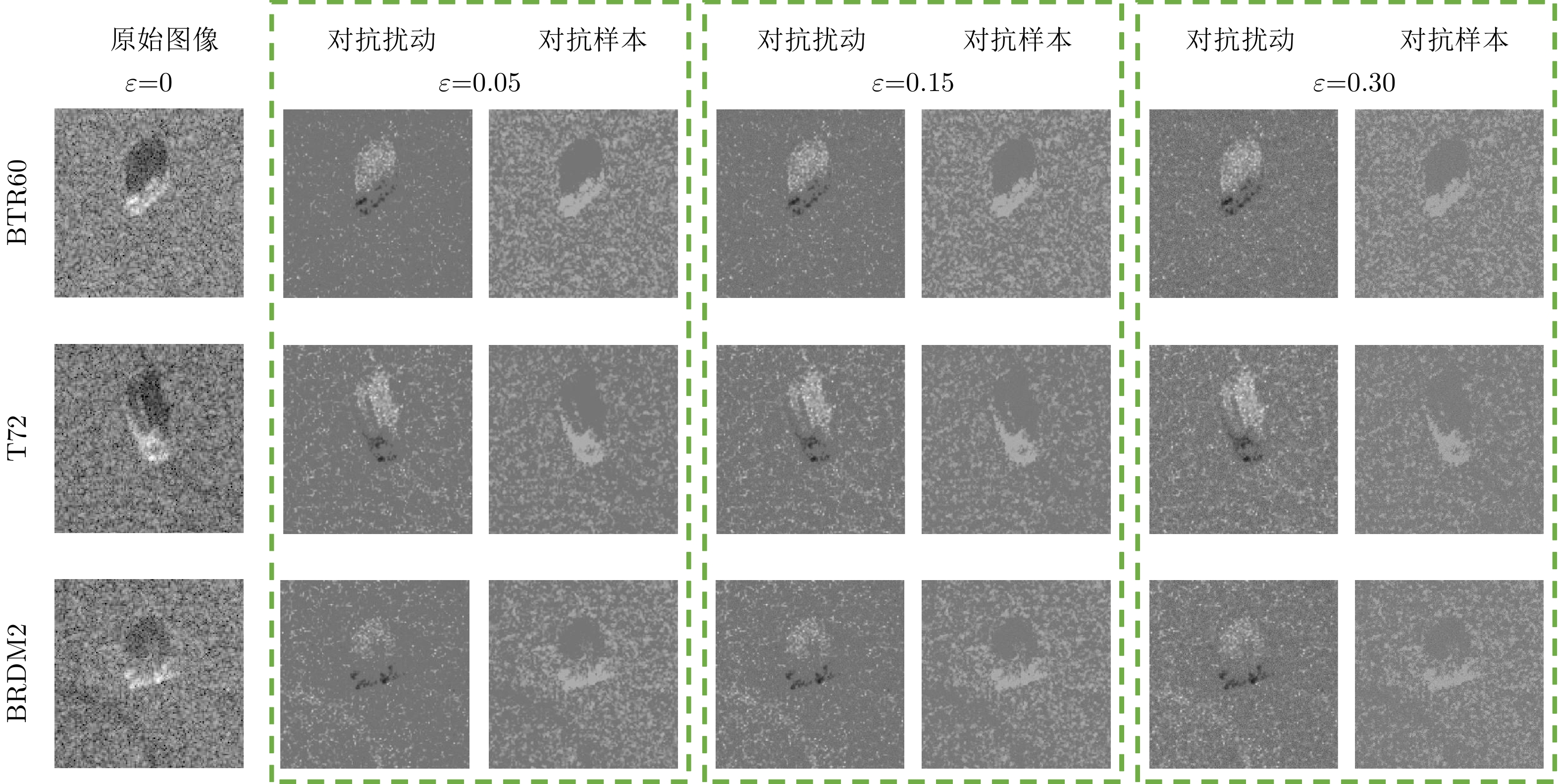
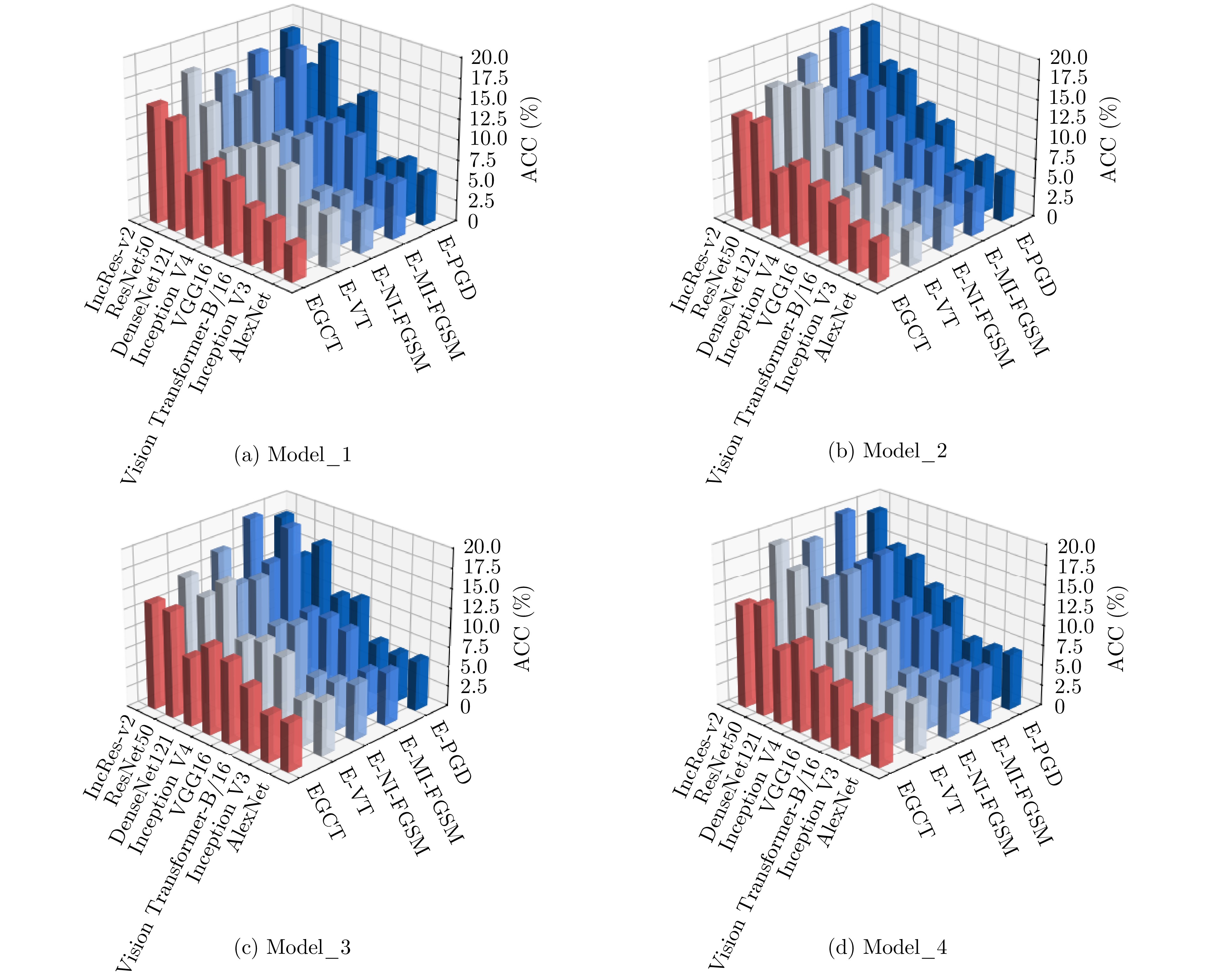
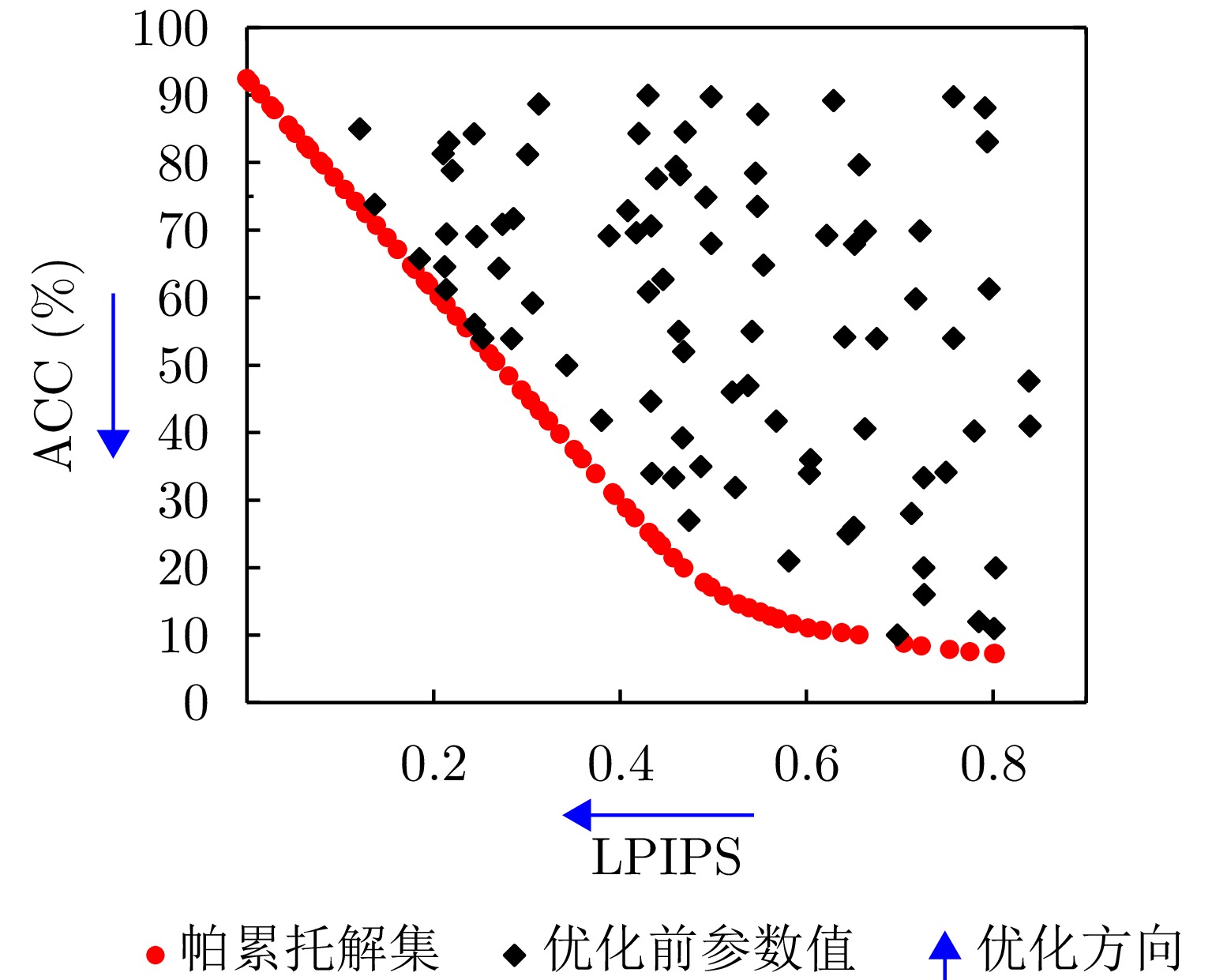
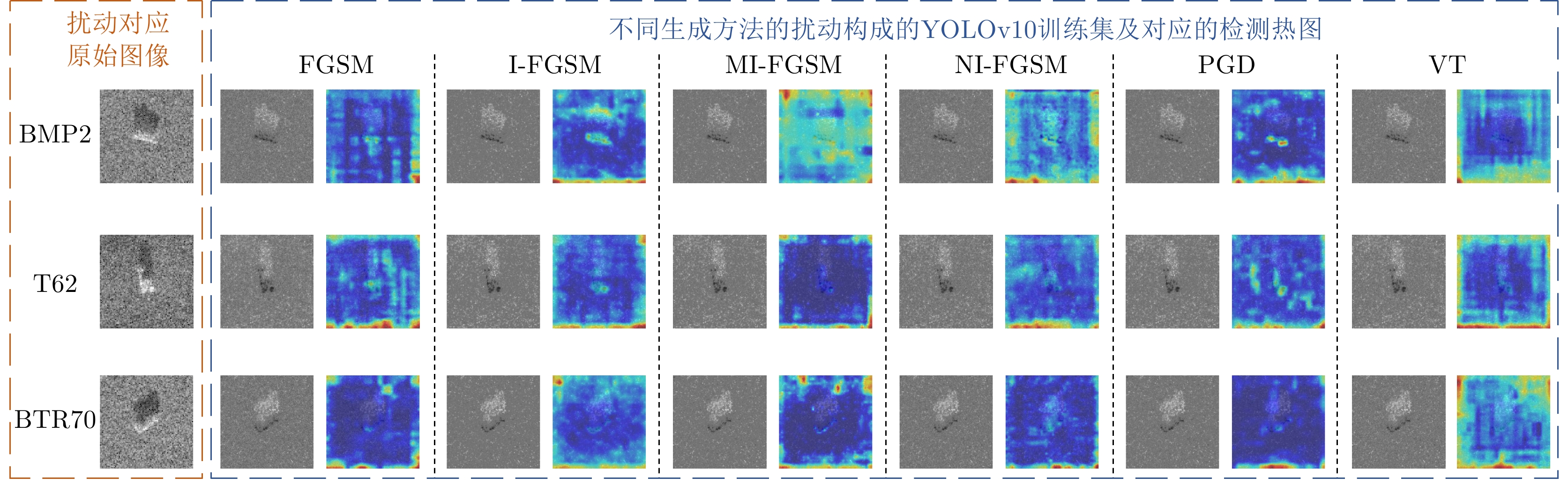
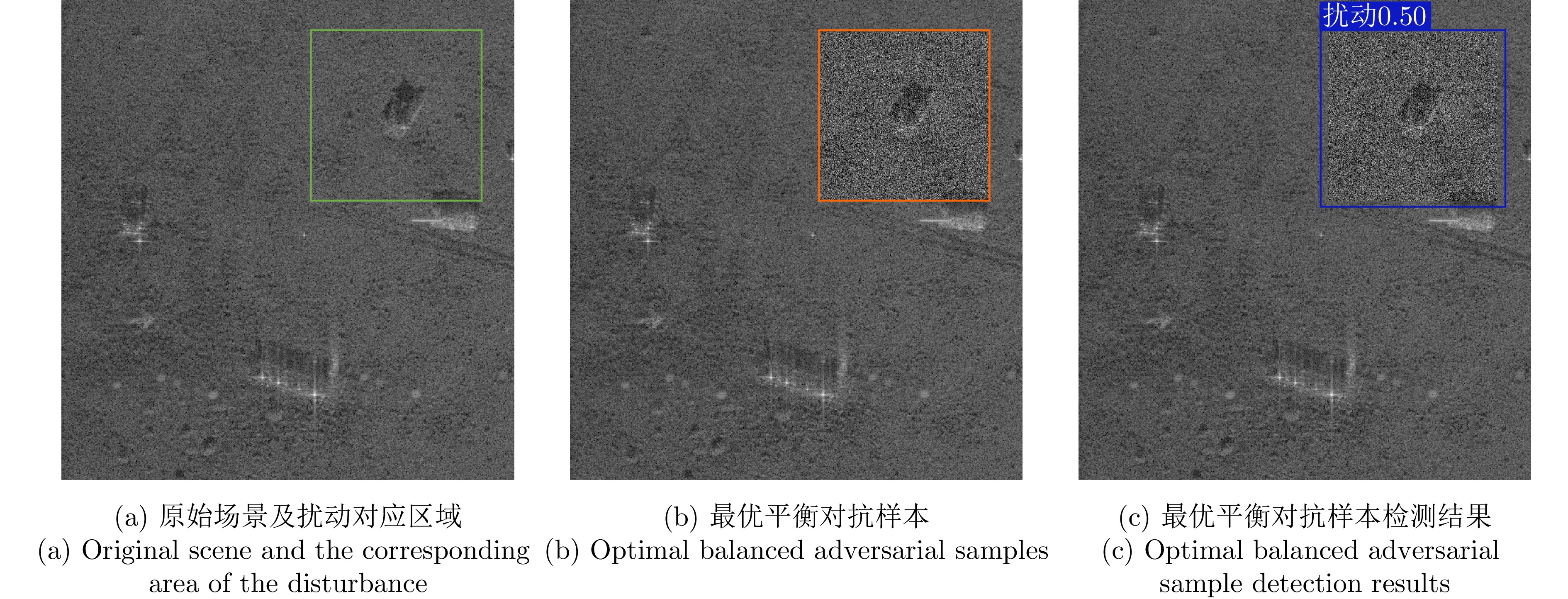
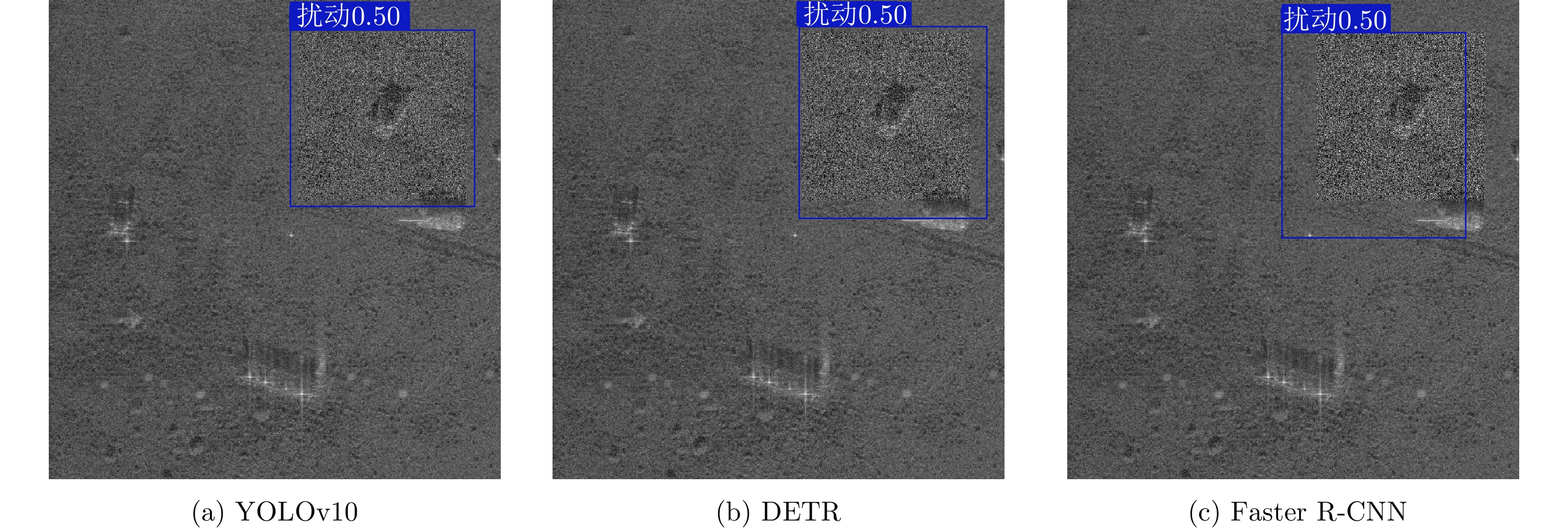
Adversarial sample generation is a key research direction for uncovering the vulnerabilities of deep neural networks and improving the robustness of Synthetic Aperture Radar Automatic Target Recognition (SAR ATR) systems. This study proposes an optimal adversarial sample generation method for SAR ATR that jointly optimizes misleading effectiveness and fidelity, aiming to resolve the core contradiction between adversarial effectiveness and visual concealment. The generation process is modeled as a joint optimization problem with the goals of balancing “misleading” and “fidelity”. First, an integrated composite transform attack strategy is designed to enhance attack effectiveness, and a joint measurement model is developed that combines the classification accuracy of the target model with the Learned Perceptual Image Patch Similarity (LPIPS) to quantify the two optimization goals. Next, an improved uniformity-guided multiobjective RIME algorithm is proposed. By integrating the Tent chaotic map, hybrid dynamic weighting, and golden sine guidance, the model is efficiently solved, yielding a set of Pareto-optimal solutions that represent various tradeoff degrees. Finally, the YOLOv10 object detection network is employed to identify perturbations in the samples within the solution set, thereby locating the critical points where disturbances occur and enabling the quantification of optimal parameters. Experiments on MSTAR and MiniSAR datasets show that the proposed ensemble compound transform attack method achieves an average target model recognition accuracy of 8.96% across different ensemble models and classification networks, improving the overall misleading effect by an average of 2.25% compared to other methods. Among them, the complex model increases by an average of 5.56%, while the proposed uniformity-guided multiobjective RIME algorithm improves the solution set diversity and convergence speed by over 25% compared with the comparison method. Using this method, the learned perceptual image patch similarity is maintained at 0.407 and the perturbation factor at 0.031, while classification accuracy decreases to 28.81%, demonstrating a tradeoff between misleading effectiveness and visual fidelity. This parameter maintains effective misleading performance under six different defense strategies, demonstrating strong robustness and providing a new approach and quantitative benchmark for adversarial attack research in SAR ATR.
Adversarial sample generation is a key research direction for uncovering the vulnerabilities of deep neural networks and improving the robustness of Synthetic Aperture Radar Automatic Target Recognition (SAR ATR) systems. This study proposes an optimal adversarial sample generation method for SAR ATR that jointly optimizes misleading effectiveness and fidelity, aiming to resolve the core contradiction between adversarial effectiveness and visual concealment. The generation process is modeled as a joint optimization problem with the goals of balancing “misleading” and “fidelity”. First, an integrated composite transform attack strategy is designed to enhance attack effectiveness, and a joint measurement model is developed that combines the classification accuracy of the target model with the Learned Perceptual Image Patch Similarity (LPIPS) to quantify the two optimization goals. Next, an improved uniformity-guided multiobjective RIME algorithm is proposed. By integrating the Tent chaotic map, hybrid dynamic weighting, and golden sine guidance, the model is efficiently solved, yielding a set of Pareto-optimal solutions that represent various tradeoff degrees. Finally, the YOLOv10 object detection network is employed to identify perturbations in the samples within the solution set, thereby locating the critical points where disturbances occur and enabling the quantification of optimal parameters. Experiments on MSTAR and MiniSAR datasets show that the proposed ensemble compound transform attack method achieves an average target model recognition accuracy of 8.96% across different ensemble models and classification networks, improving the overall misleading effect by an average of 2.25% compared to other methods. Among them, the complex model increases by an average of 5.56%, while the proposed uniformity-guided multiobjective RIME algorithm improves the solution set diversity and convergence speed by over 25% compared with the comparison method. Using this method, the learned perceptual image patch similarity is maintained at 0.407 and the perturbation factor at 0.031, while classification accuracy decreases to 28.81%, demonstrating a tradeoff between misleading effectiveness and visual fidelity. This parameter maintains effective misleading performance under six different defense strategies, demonstrating strong robustness and providing a new approach and quantitative benchmark for adversarial attack research in SAR ATR.
2026,
15(2):
583-604.
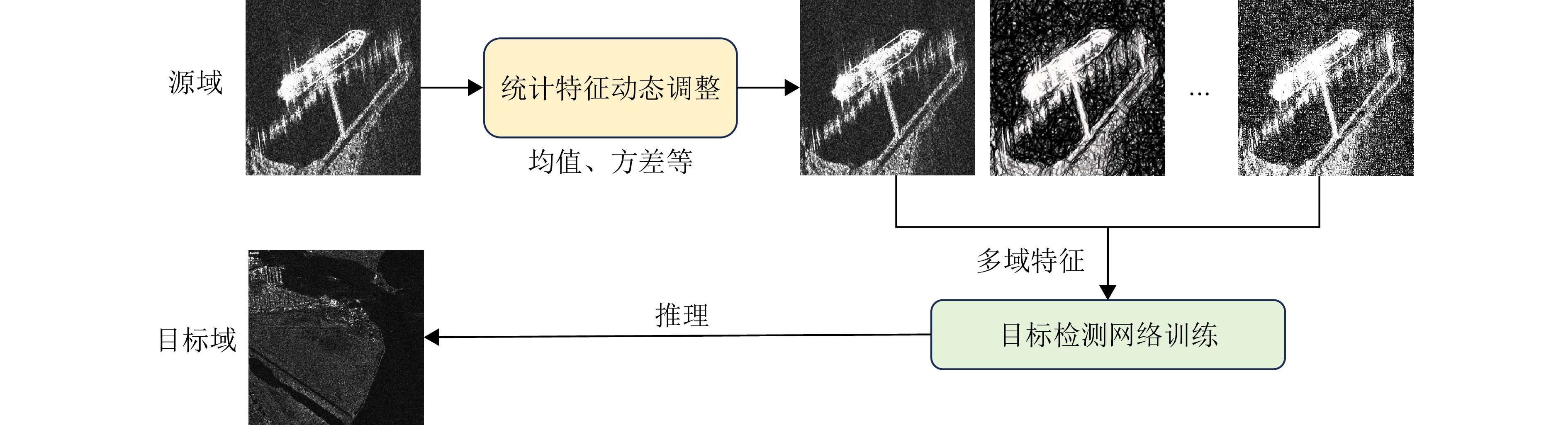
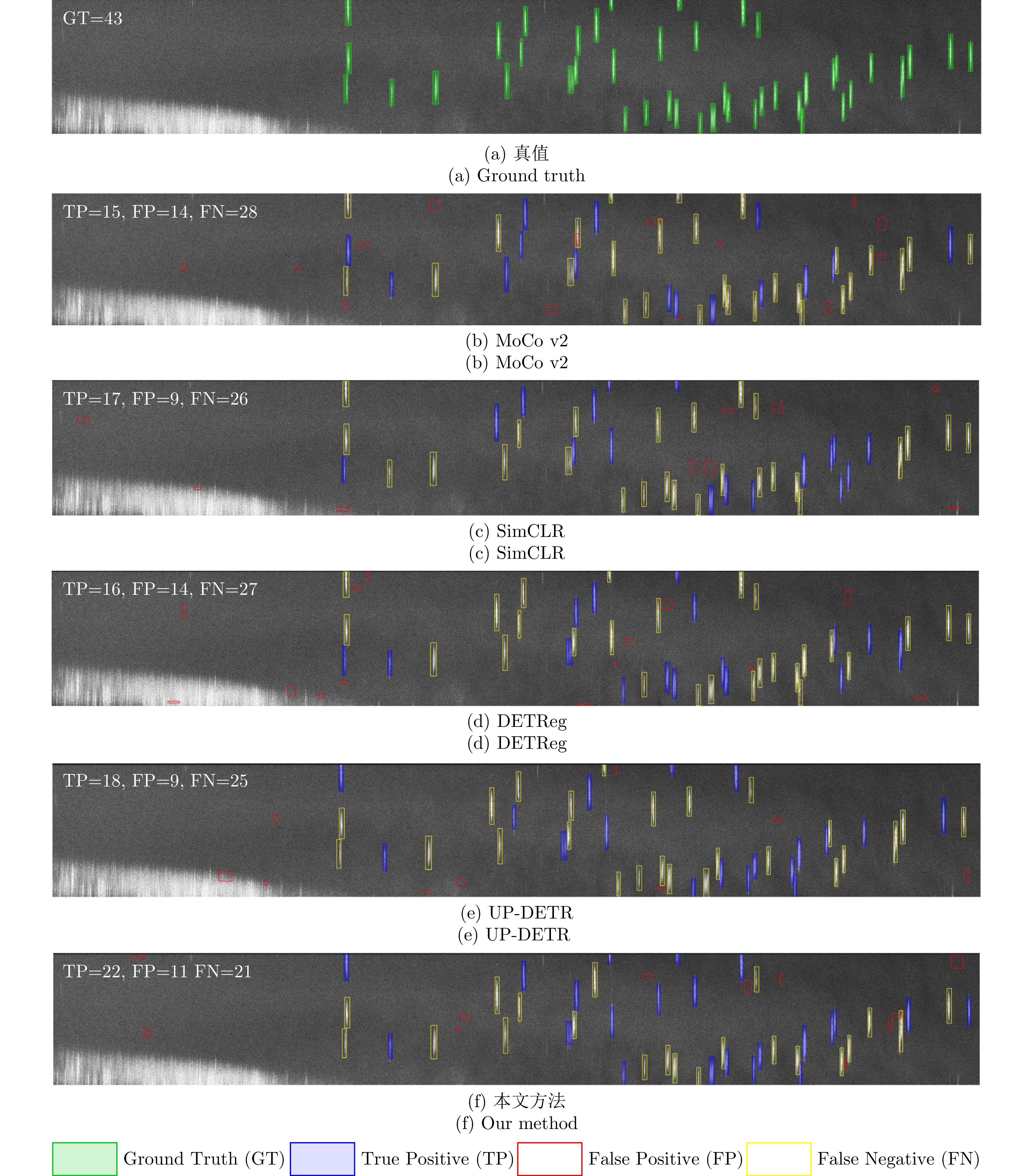
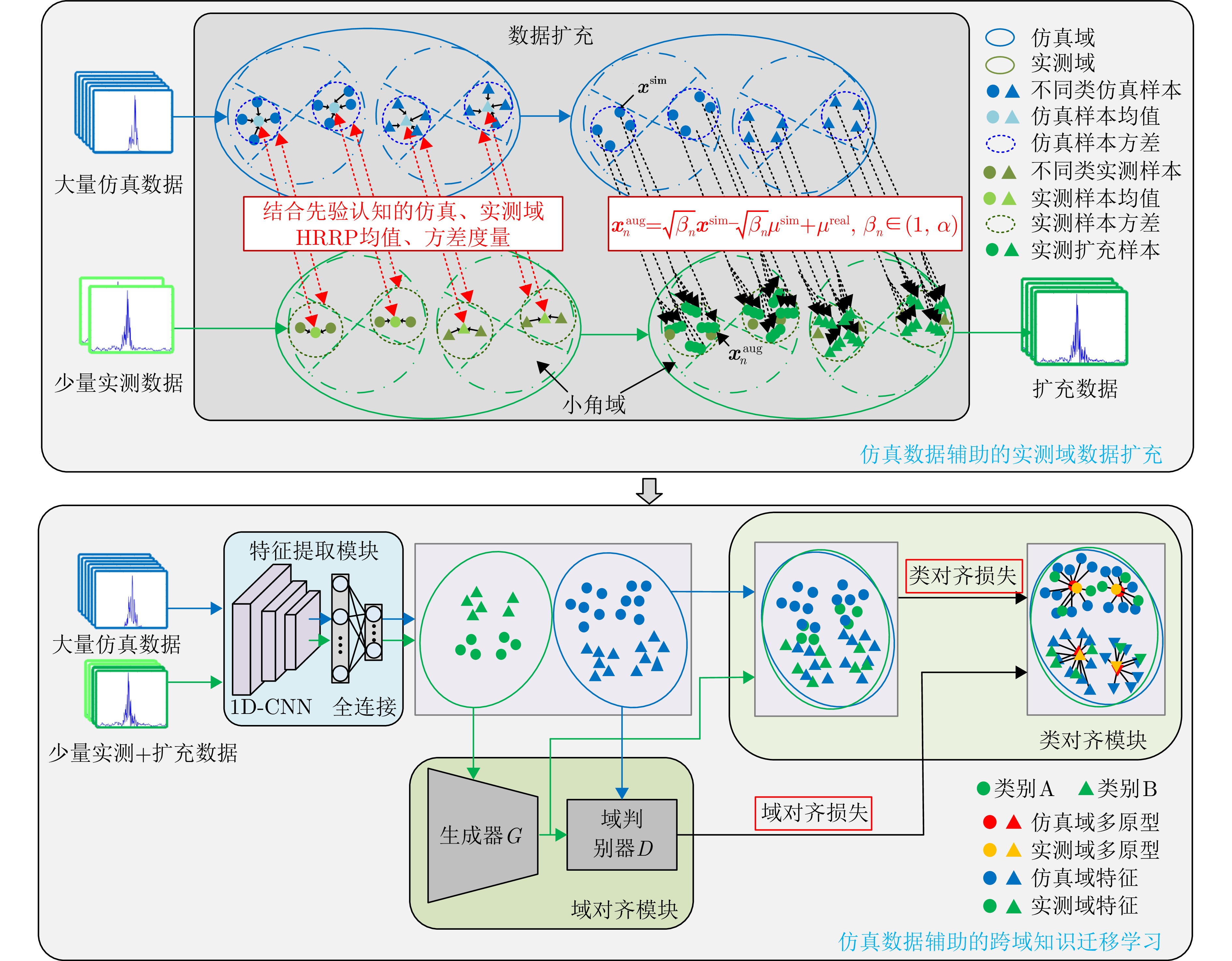
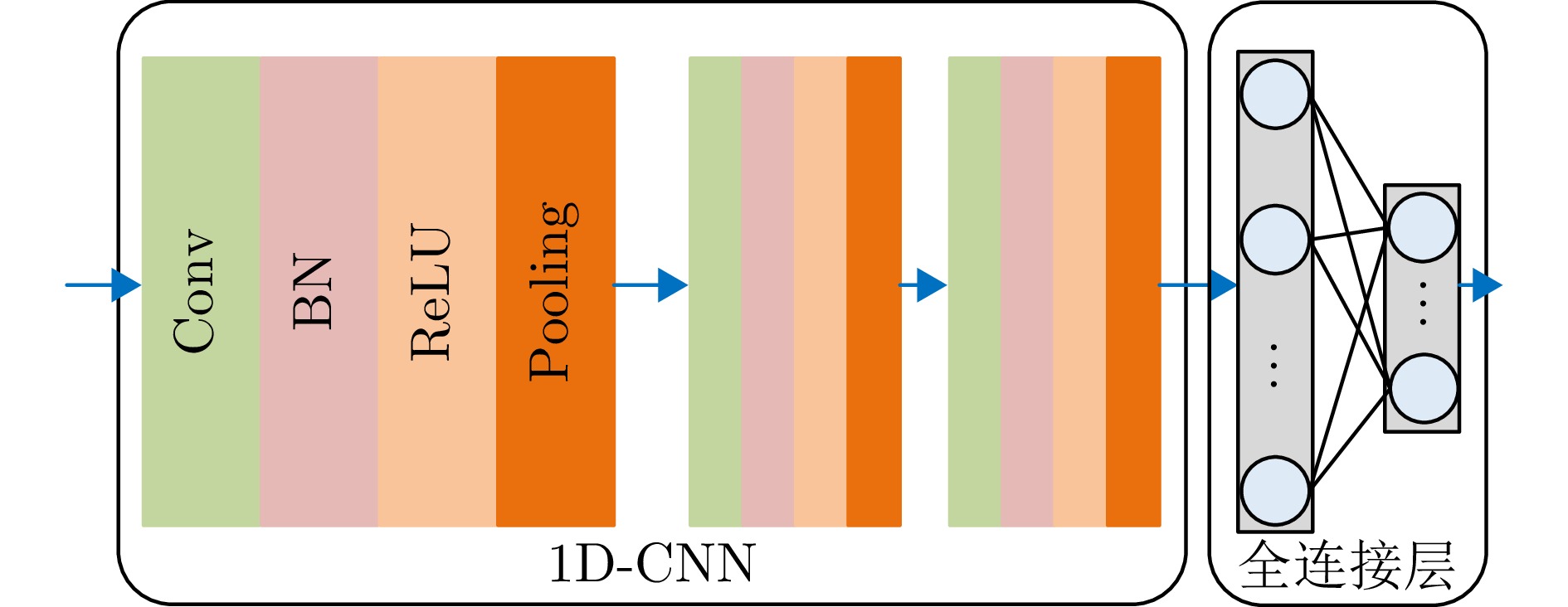
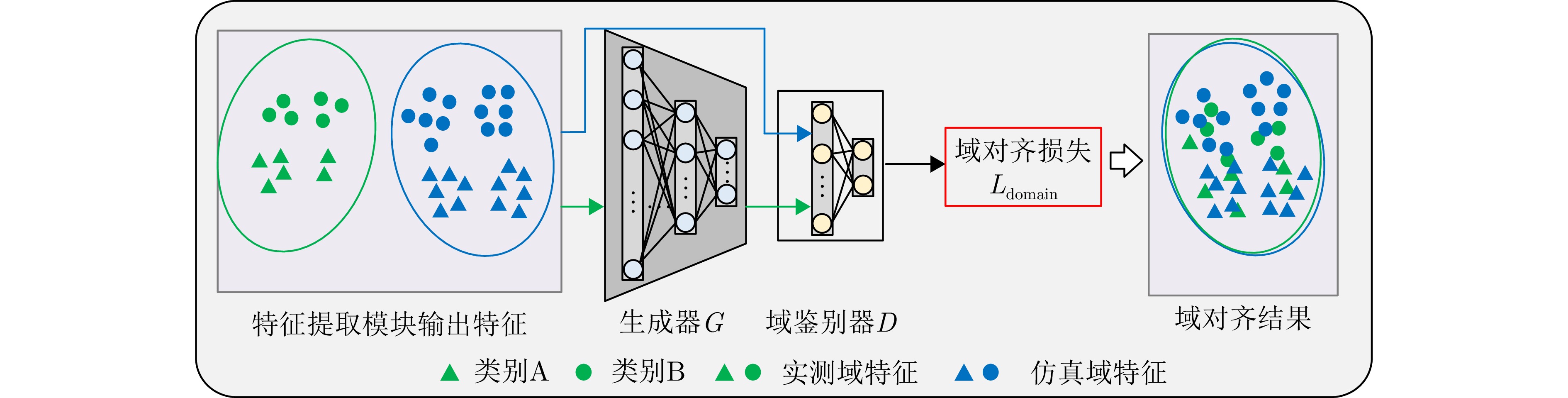
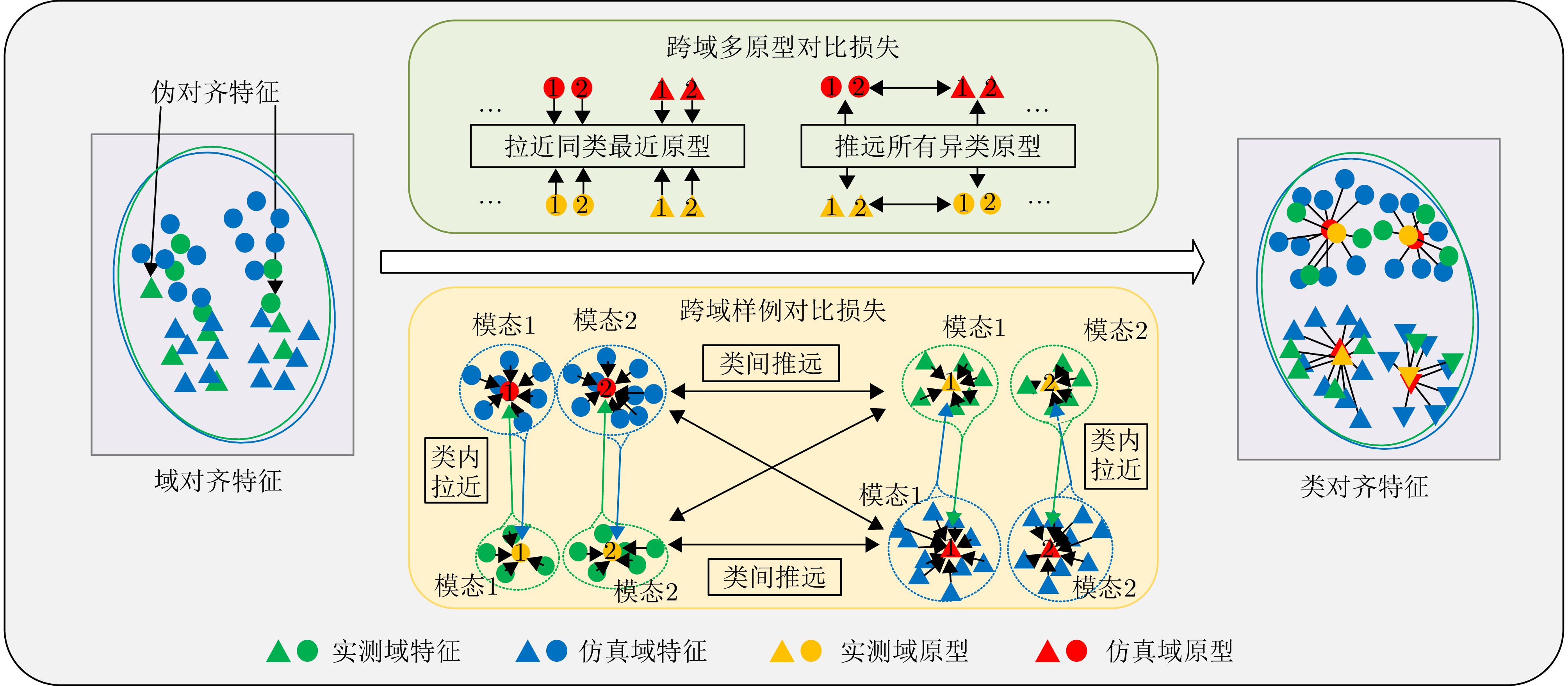
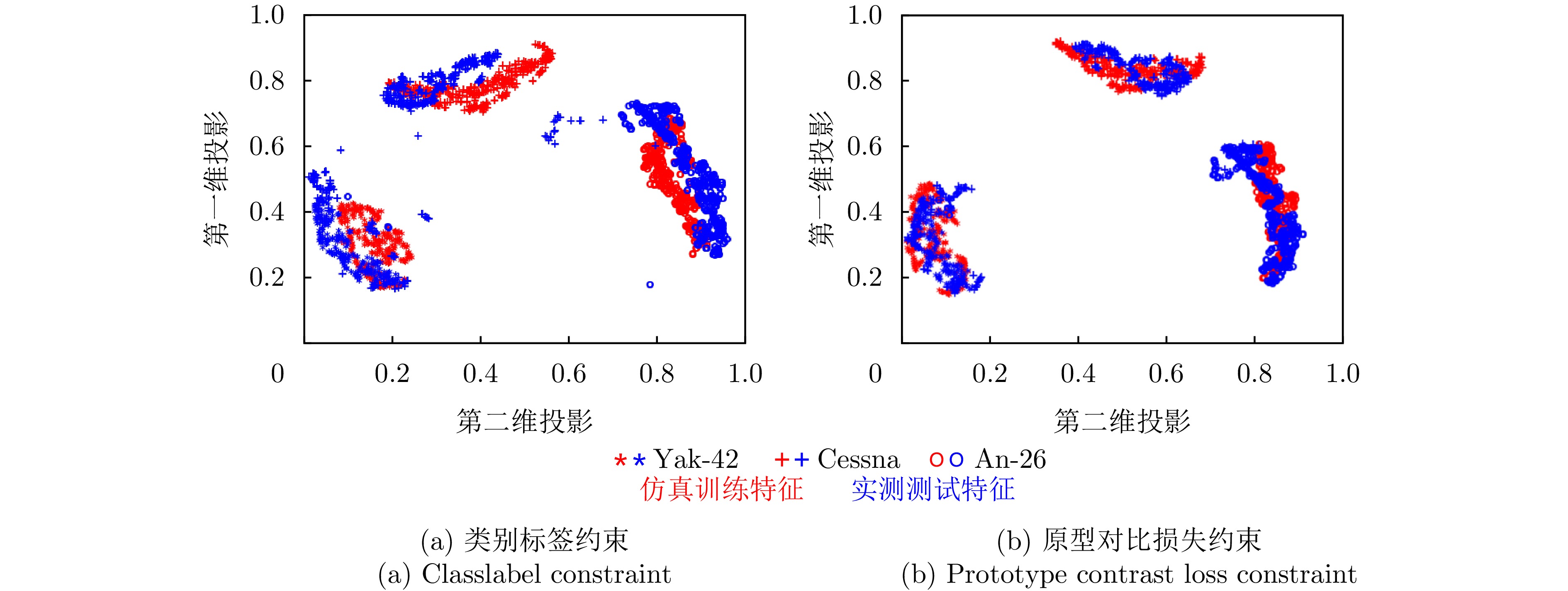
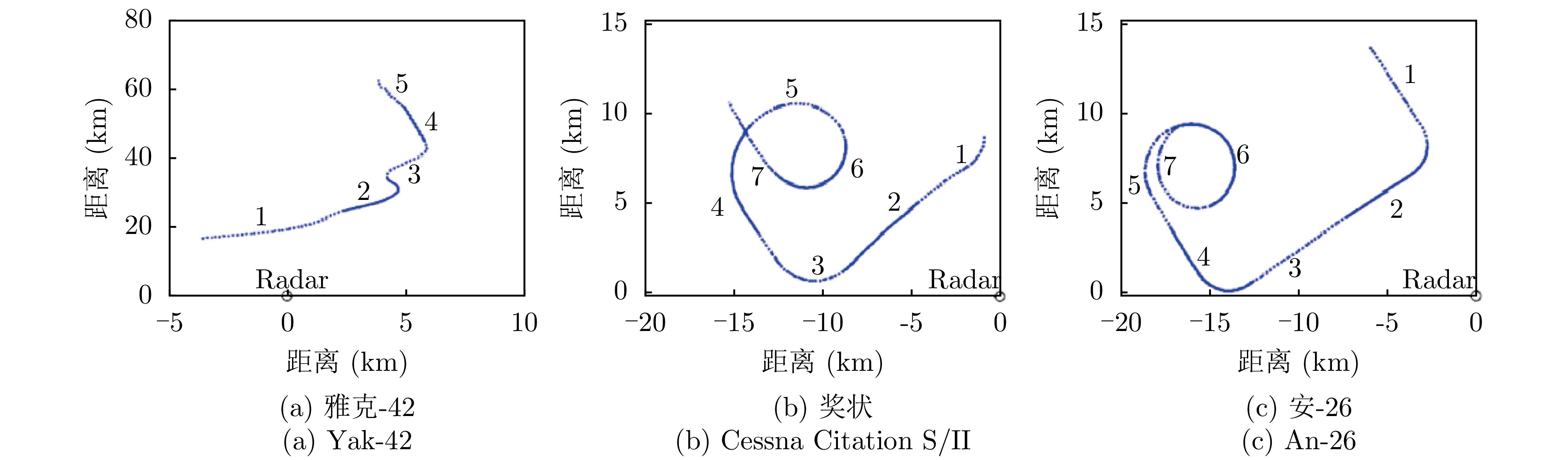
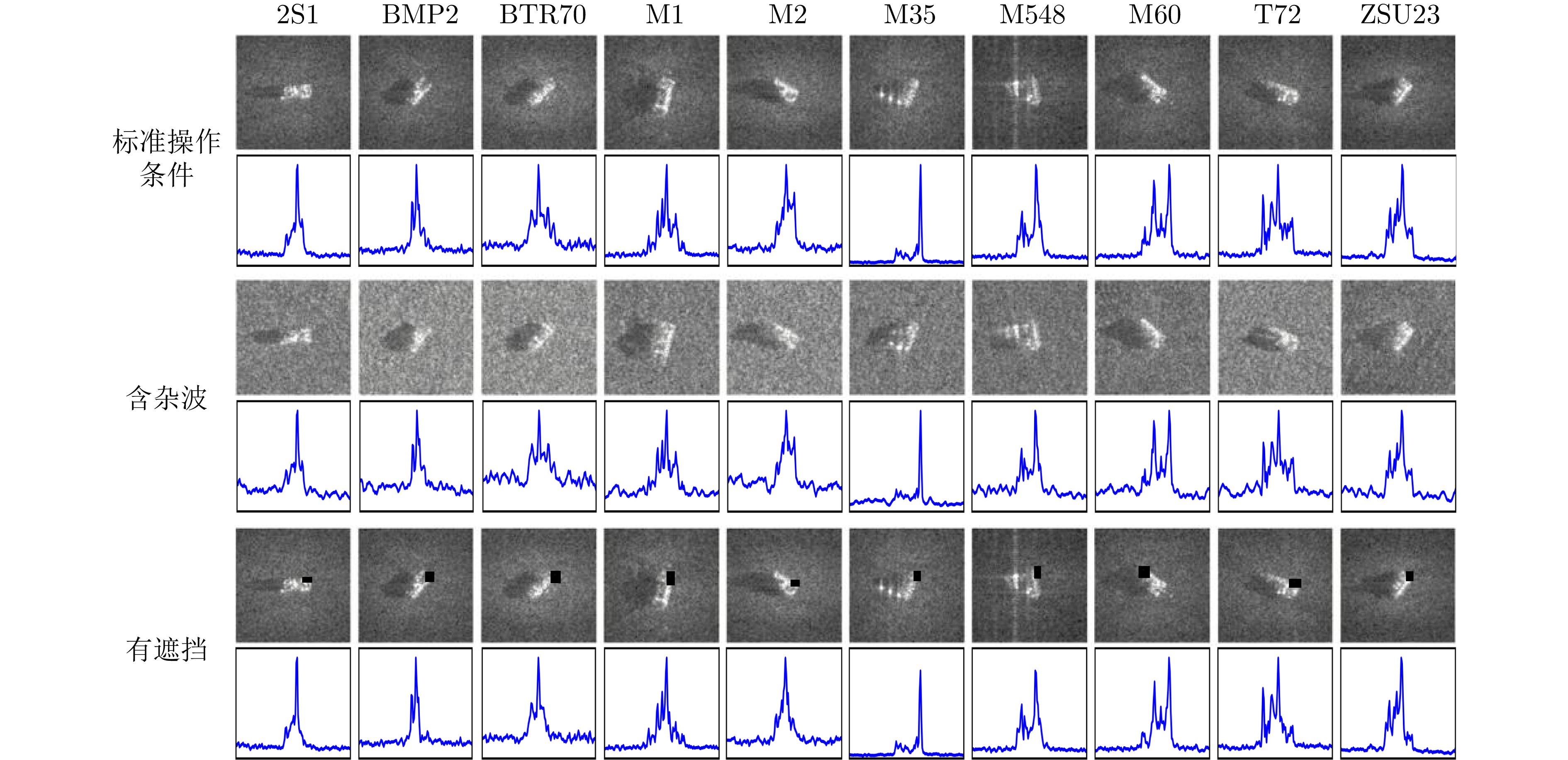
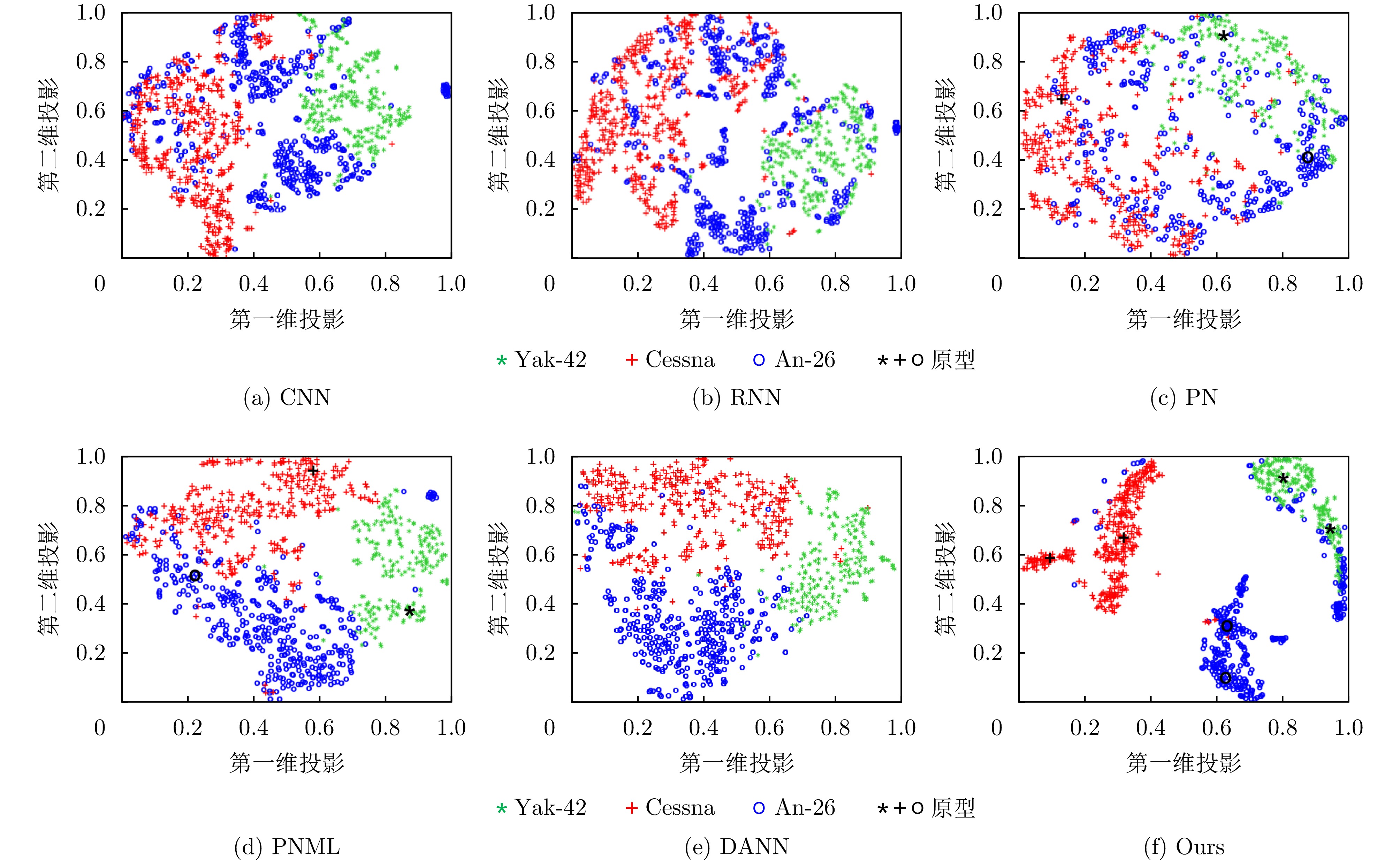
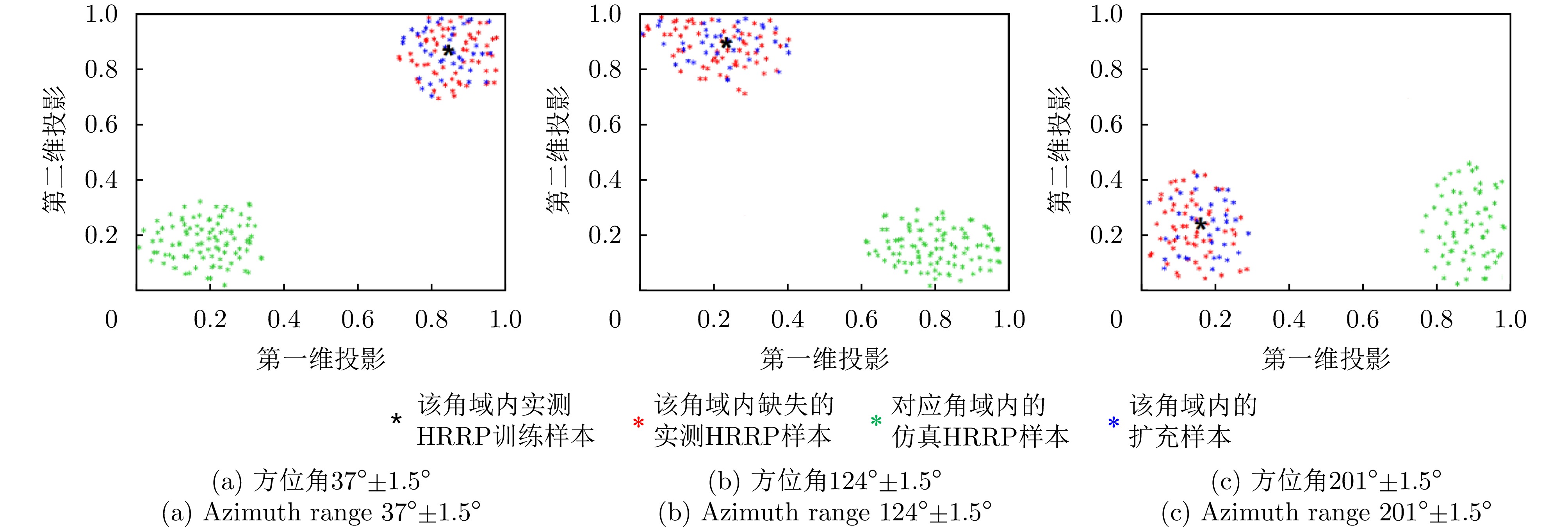
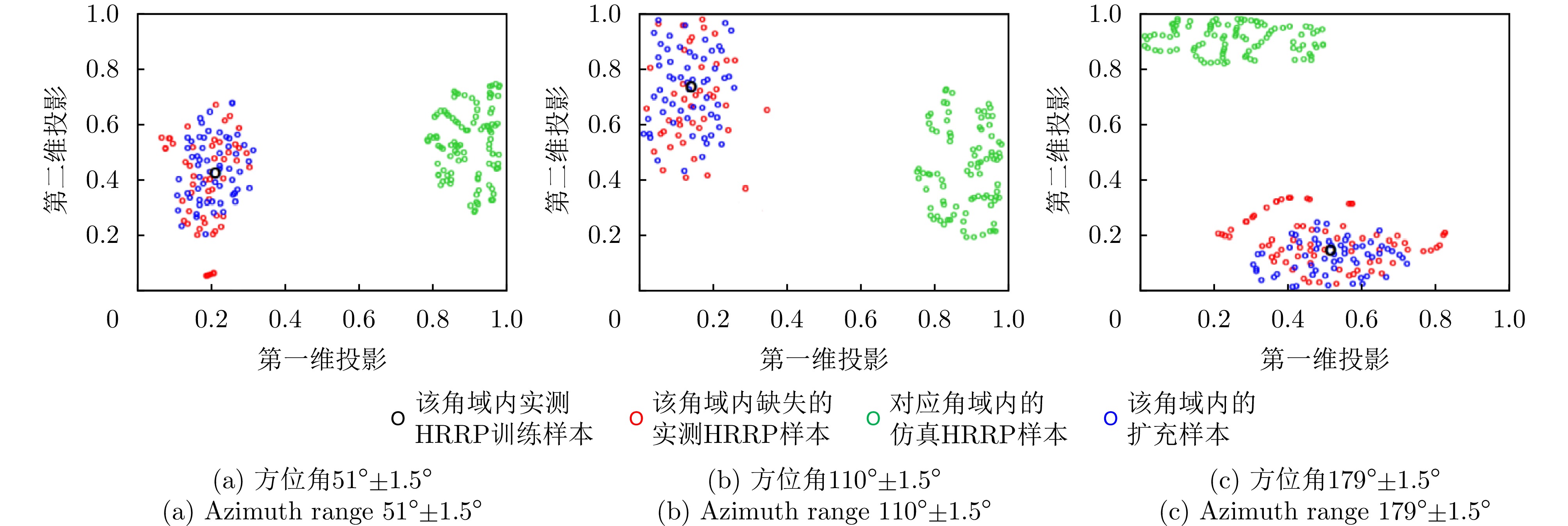
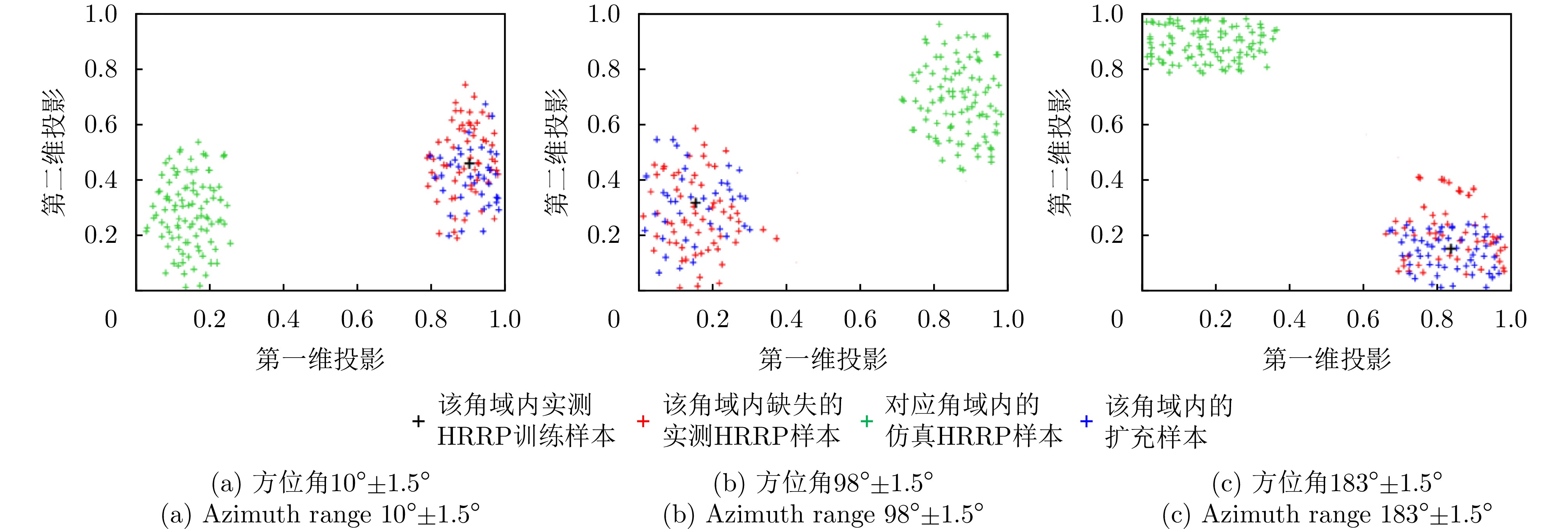
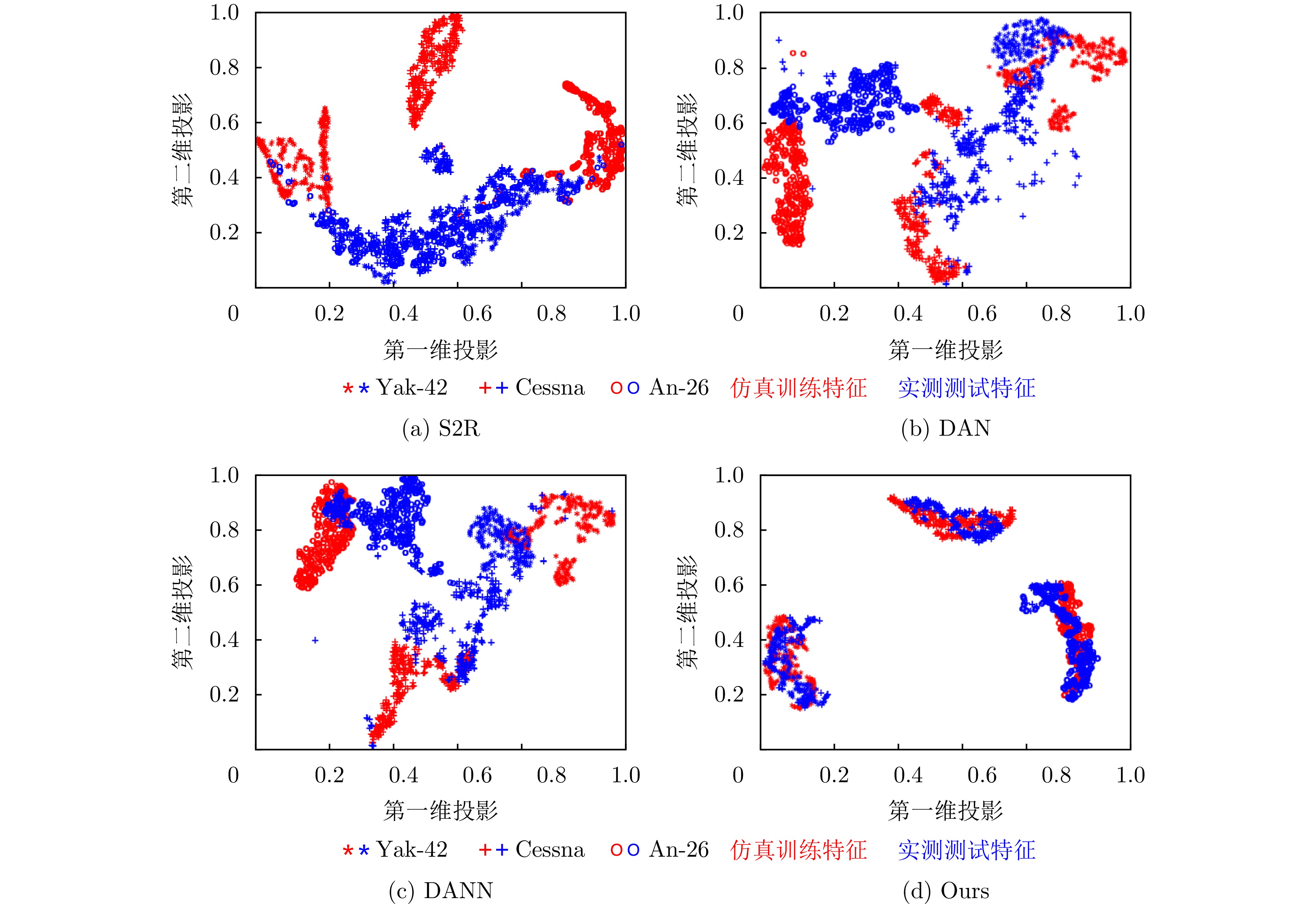
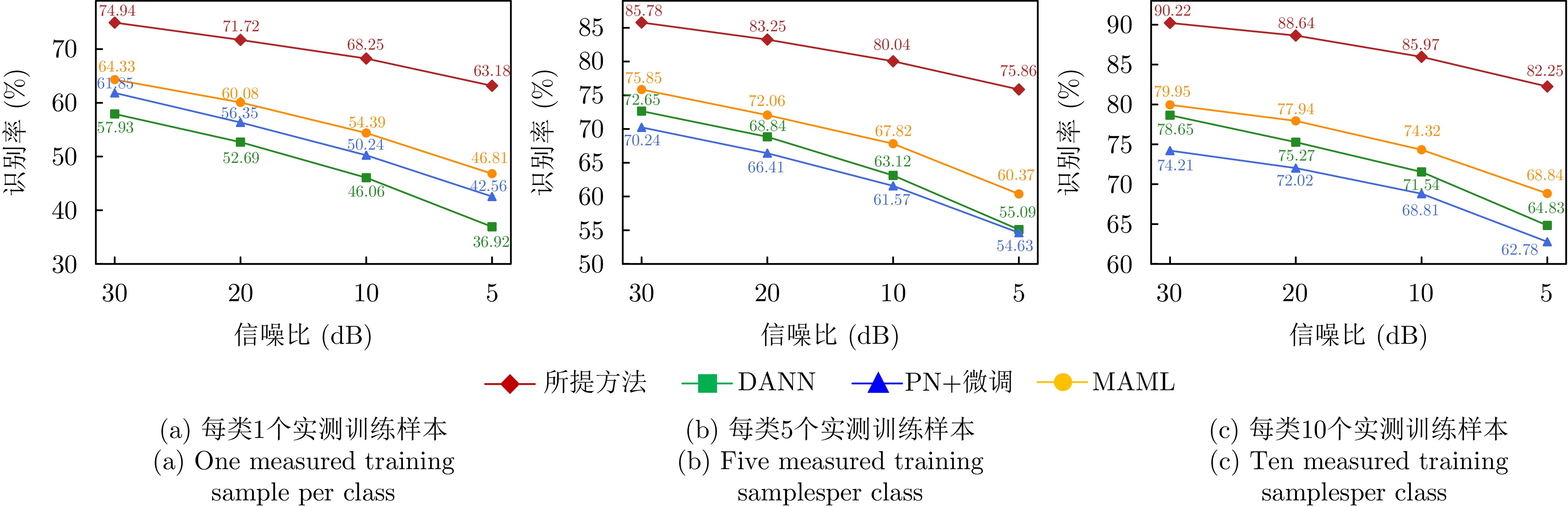
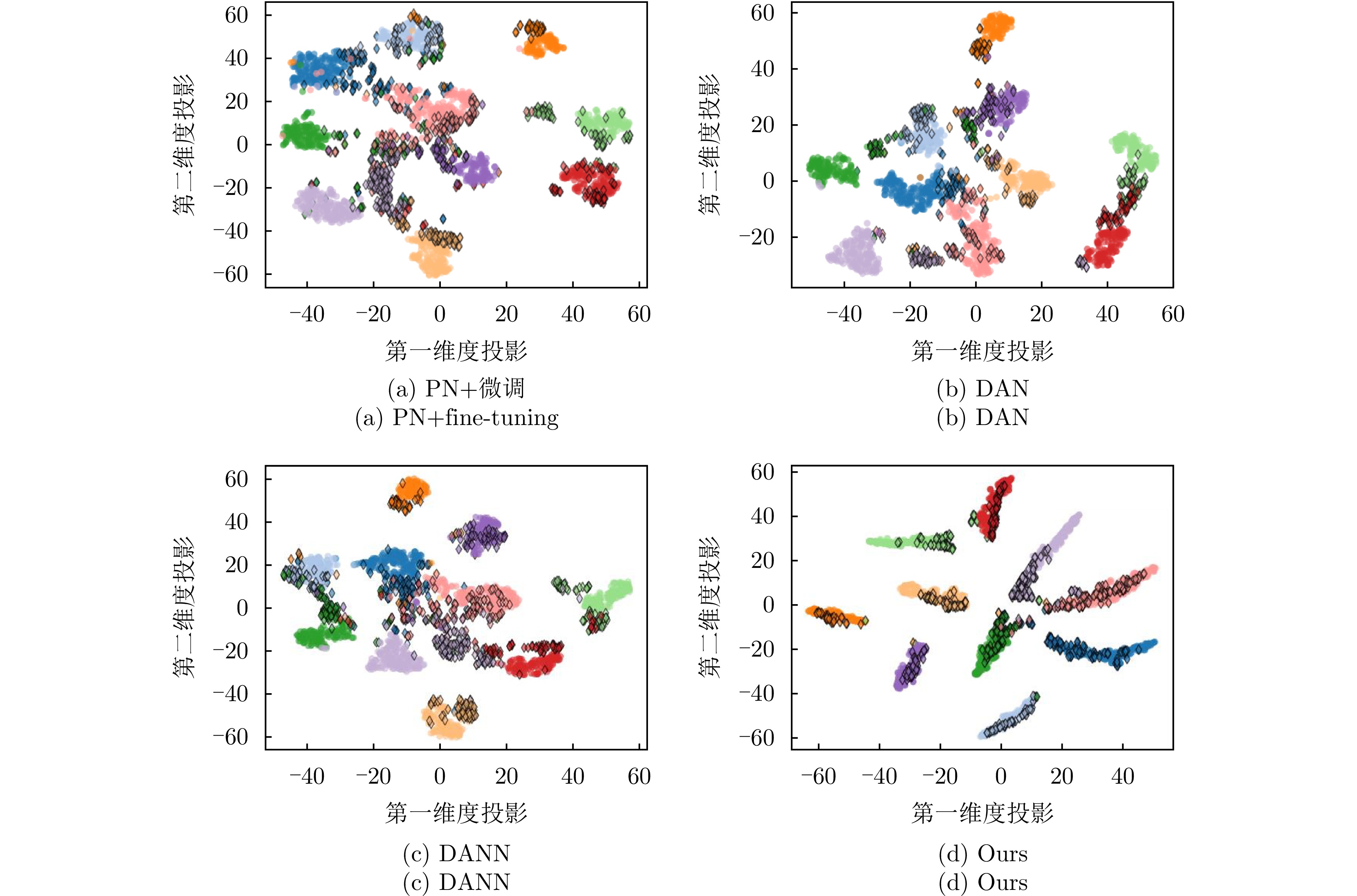
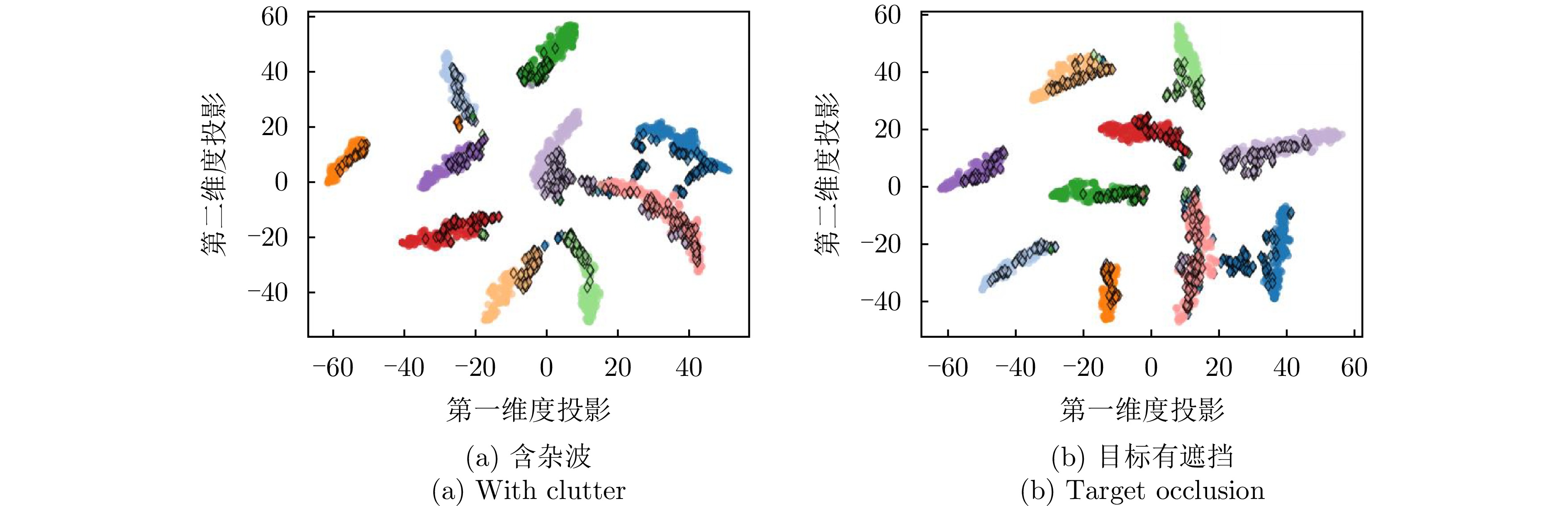
Research on target recognition using radar High-Resolution Range Profiles (HRRPs) is extensive and diverse in methodology. In particular, the application and development of deep learning to radar HRRP target recognition have enabled efficient, precise target perception directly from radar echoes. However, deep learning-based recognition networks rely on large amounts of training data. For non-cooperative targets, due to limited radar system parameters and rapid target attitude variations, acquiring adequate HRRP training samples that comprehensively cover target attitudes in advance is difficult in practice. Consequently, deep recognition networks are prone to overfitting and exhibit considerably degraded generalization capability. To address these issues, and given the ease of obtaining full-attitude electromagnetic simulation data for the target, this paper leverages simulated data as auxiliary information to mitigate the small-sample-size problem through data augmentation and cross-domain knowledge-transfer learning. For data augmentation, based on the analysis of differences in mean and variance between simulated and measured HRRPs within a given attitude-angle range, a linear transformation is applied to a set of simulated HRRPs spanning the same angular domain as a small set of measured HRRPs. This adjustment ensures that the simulated data’s mean and variance match the characteristics of the measured HRRPs, thereby achieving data augmentation that approximates the true distributional properties of HRRPs. Meanwhile, for cross-domain knowledge transfer learning, the proposed method introduces a domain alignment strategy based on generative adversarial constraints and a class alignment strategy based on contrastive learning constraints. These approaches draw the domain features of full-attitude simulation—strong discriminability and generalizability—closer to the measured domain features on a class-by-class basis, thereby further aiding learning from the measured domain data and leading to substantial improvements in few-shot recognition performance. Experimental results based on electromagnetic simulated and measured HRRP data for three and ten types of aircraft and ground vehicle targets, respectively, demonstrate that the proposed method yields superior recognition robustness compared with existing few-shot recognition methods.
Research on target recognition using radar High-Resolution Range Profiles (HRRPs) is extensive and diverse in methodology. In particular, the application and development of deep learning to radar HRRP target recognition have enabled efficient, precise target perception directly from radar echoes. However, deep learning-based recognition networks rely on large amounts of training data. For non-cooperative targets, due to limited radar system parameters and rapid target attitude variations, acquiring adequate HRRP training samples that comprehensively cover target attitudes in advance is difficult in practice. Consequently, deep recognition networks are prone to overfitting and exhibit considerably degraded generalization capability. To address these issues, and given the ease of obtaining full-attitude electromagnetic simulation data for the target, this paper leverages simulated data as auxiliary information to mitigate the small-sample-size problem through data augmentation and cross-domain knowledge-transfer learning. For data augmentation, based on the analysis of differences in mean and variance between simulated and measured HRRPs within a given attitude-angle range, a linear transformation is applied to a set of simulated HRRPs spanning the same angular domain as a small set of measured HRRPs. This adjustment ensures that the simulated data’s mean and variance match the characteristics of the measured HRRPs, thereby achieving data augmentation that approximates the true distributional properties of HRRPs. Meanwhile, for cross-domain knowledge transfer learning, the proposed method introduces a domain alignment strategy based on generative adversarial constraints and a class alignment strategy based on contrastive learning constraints. These approaches draw the domain features of full-attitude simulation—strong discriminability and generalizability—closer to the measured domain features on a class-by-class basis, thereby further aiding learning from the measured domain data and leading to substantial improvements in few-shot recognition performance. Experimental results based on electromagnetic simulated and measured HRRP data for three and ten types of aircraft and ground vehicle targets, respectively, demonstrate that the proposed method yields superior recognition robustness compared with existing few-shot recognition methods.
2026,
15(2):
605-619.
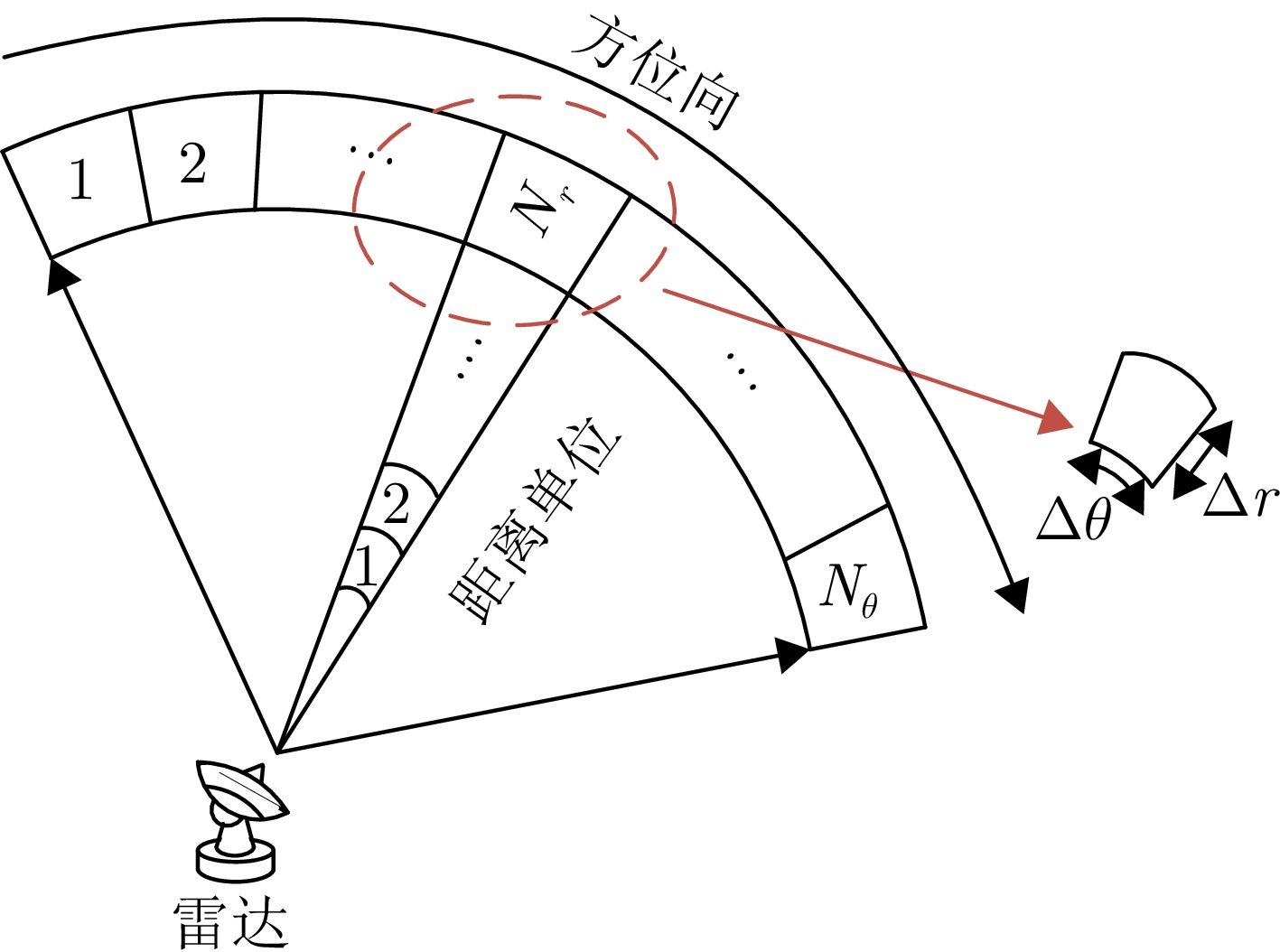
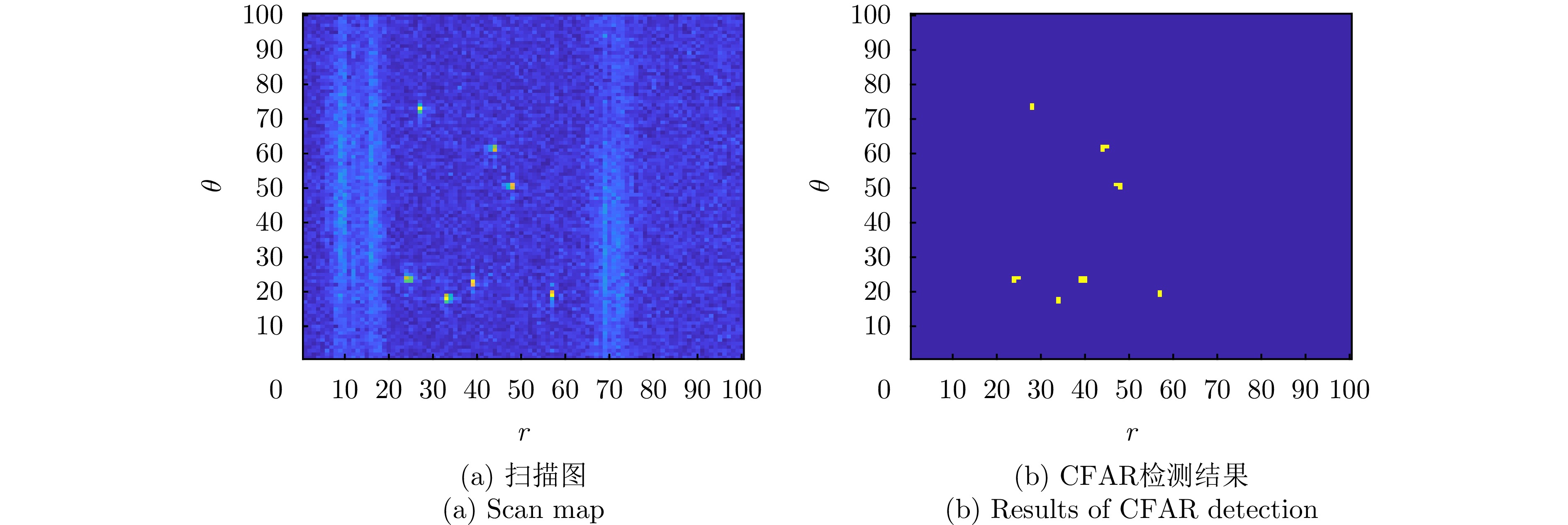
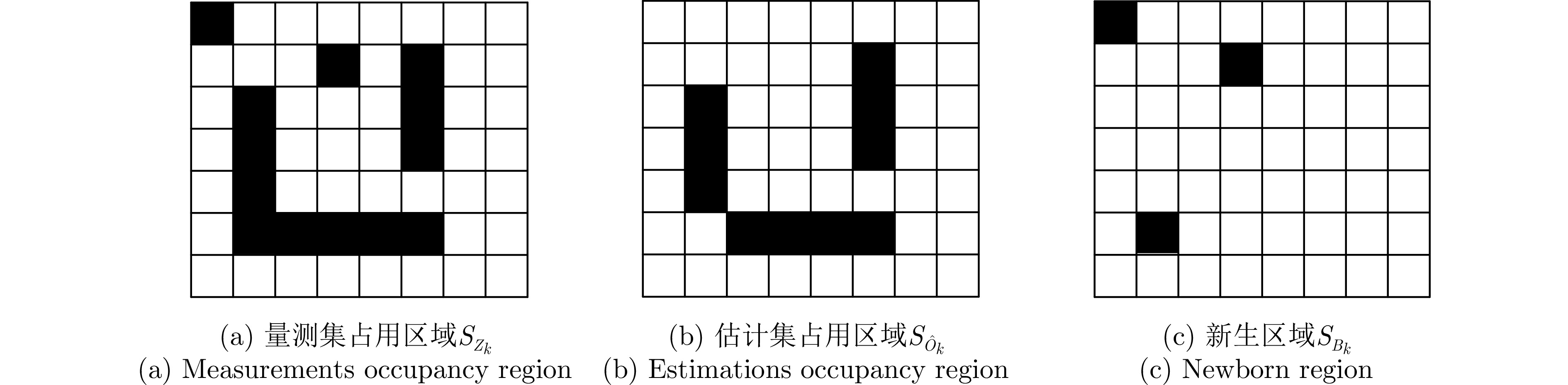
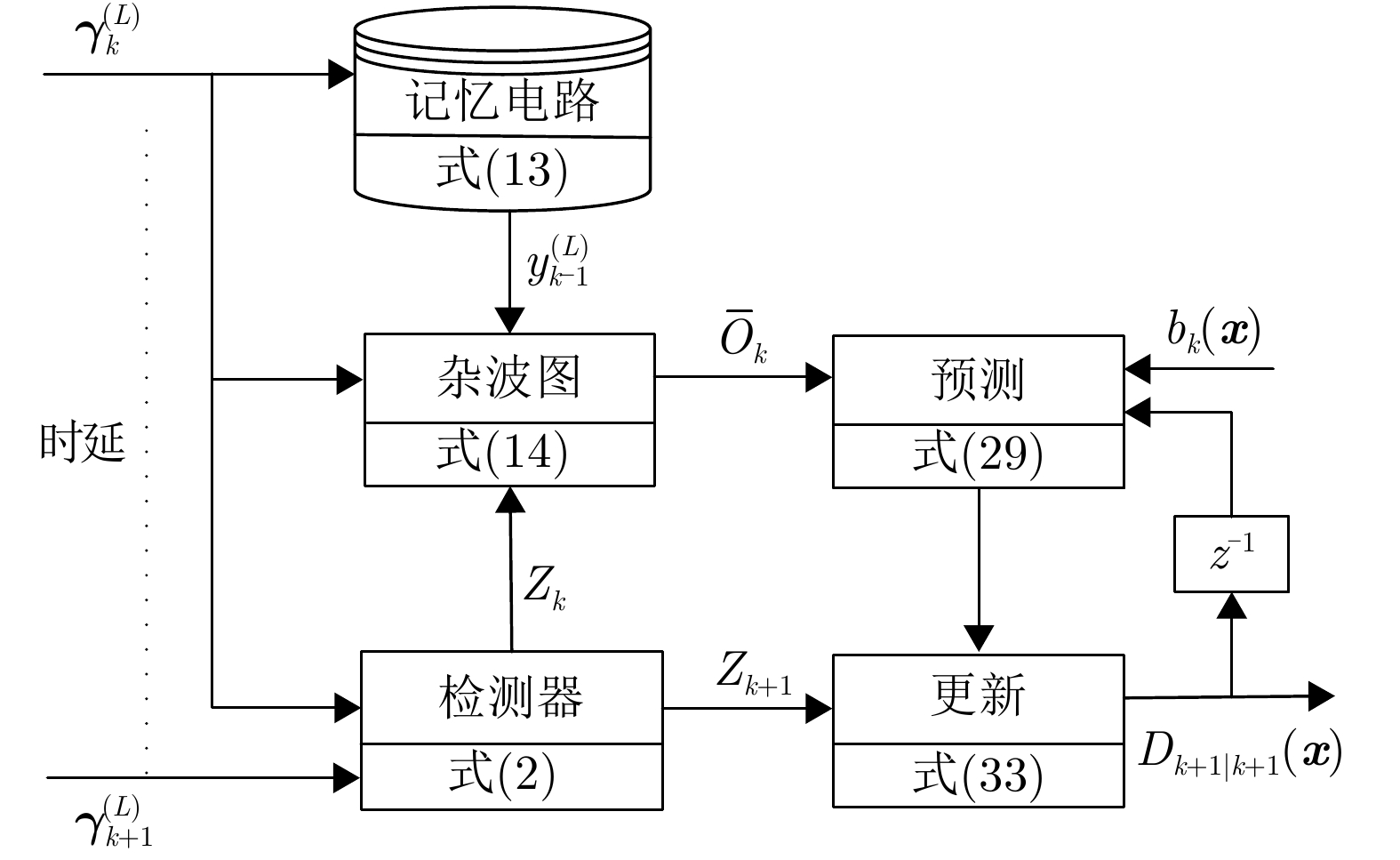
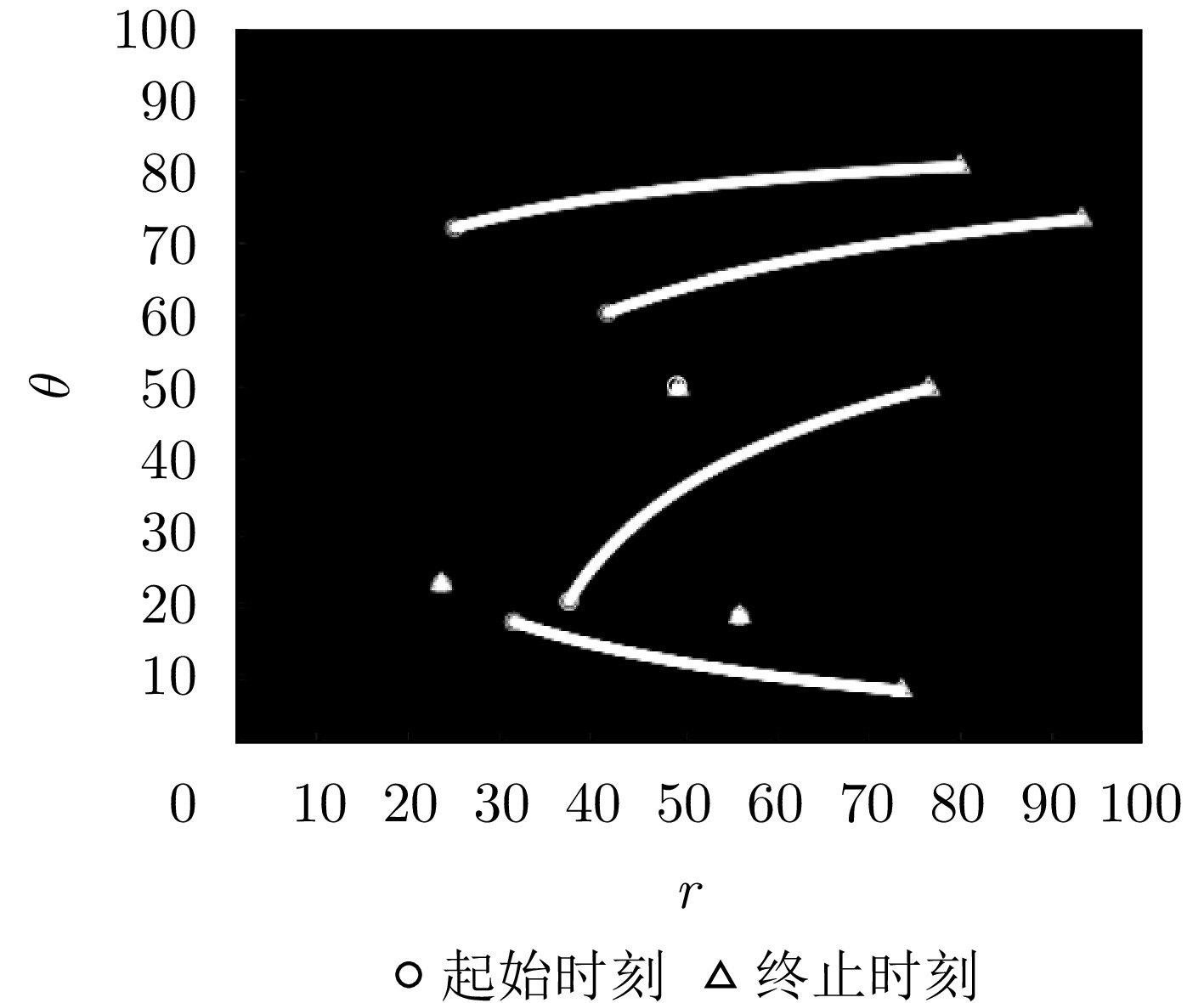
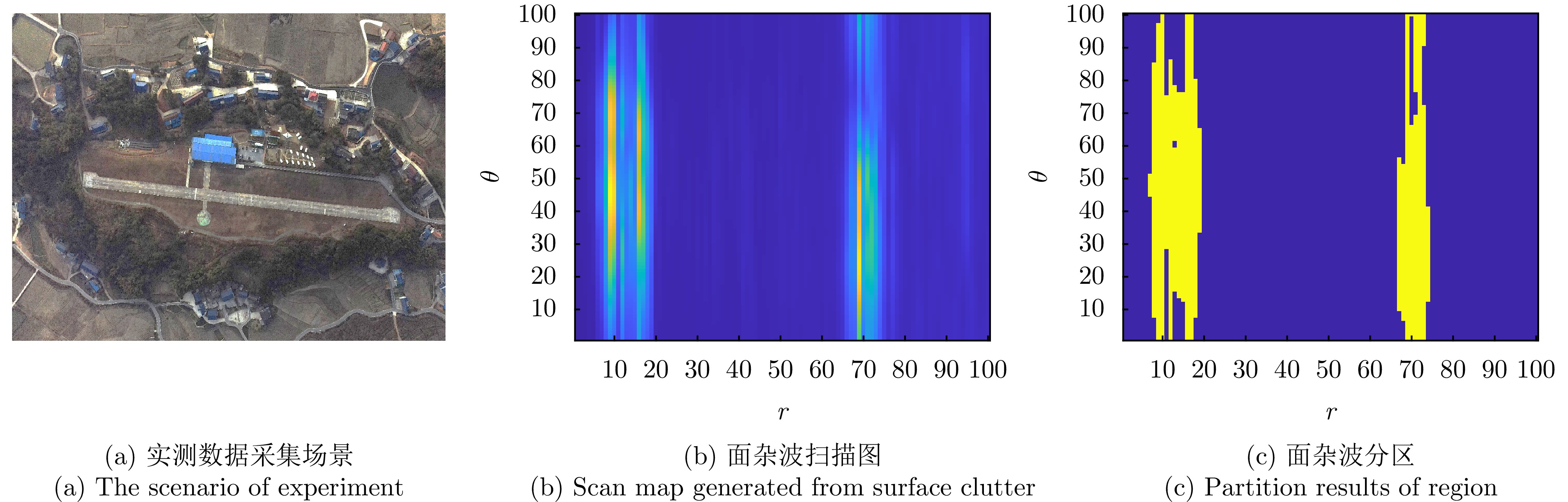
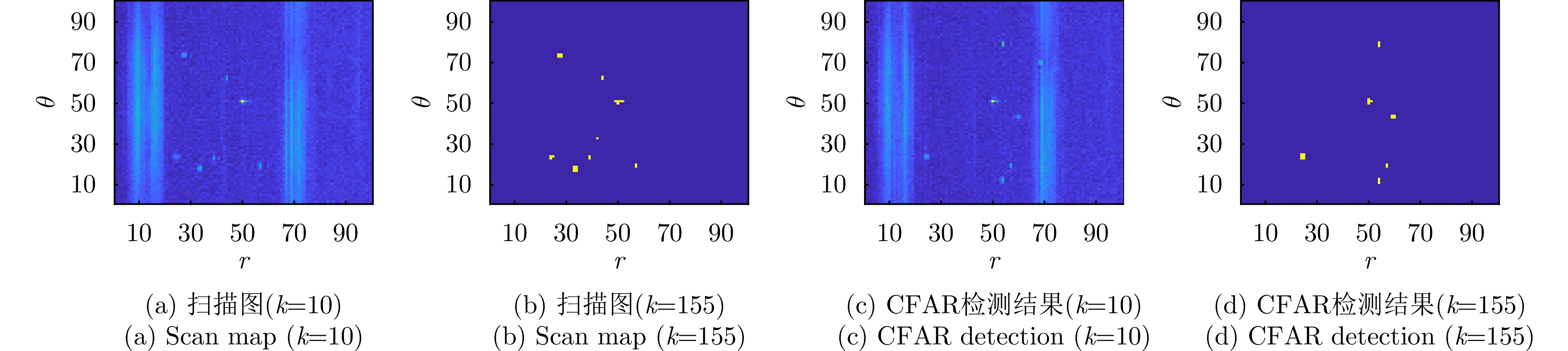
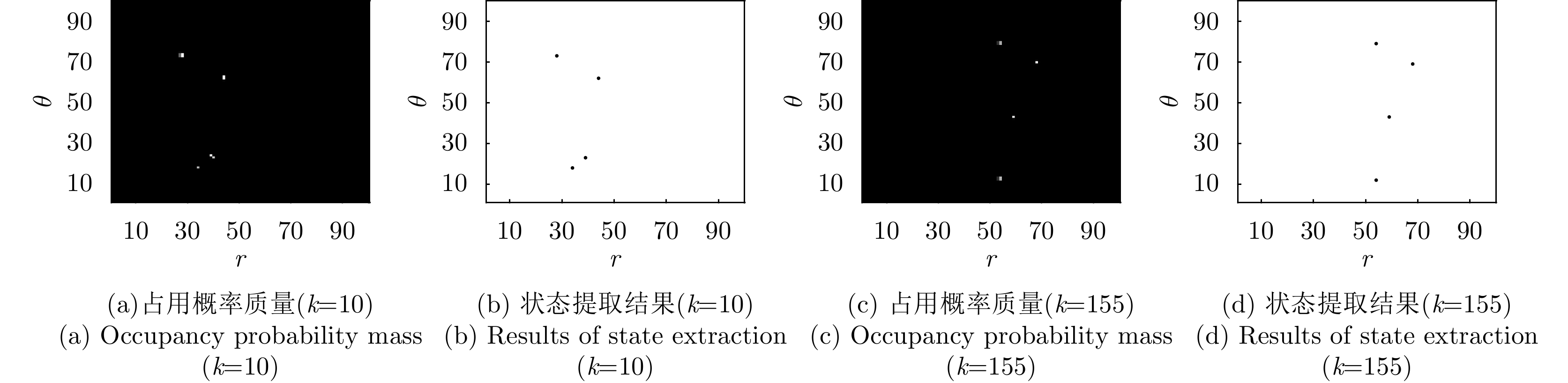
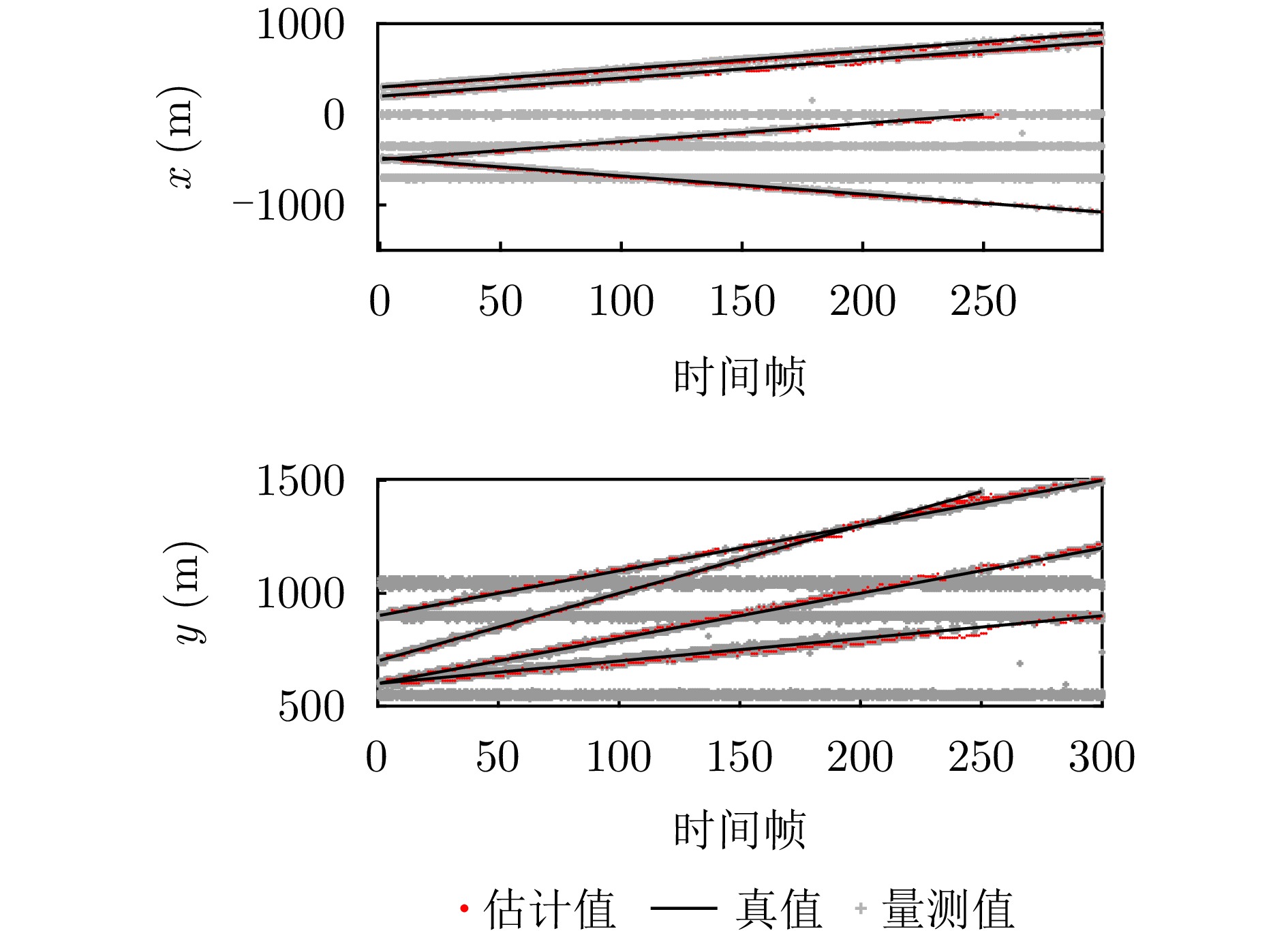
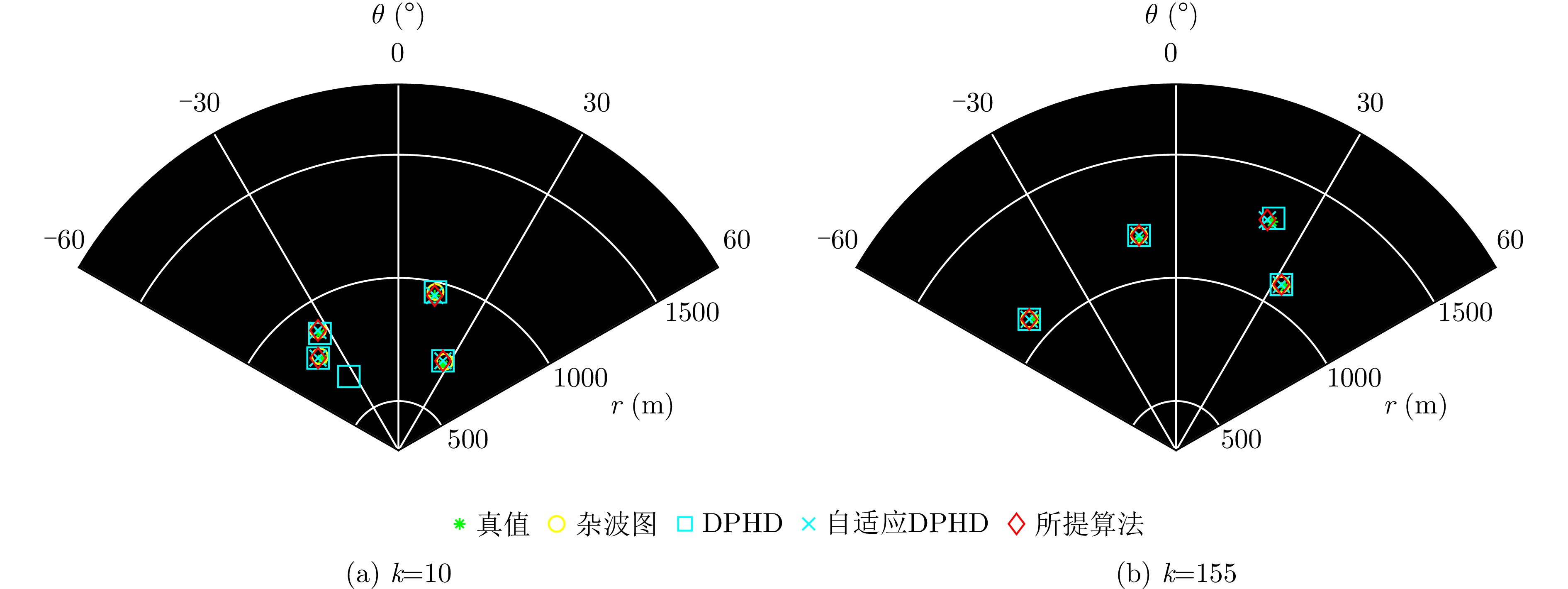
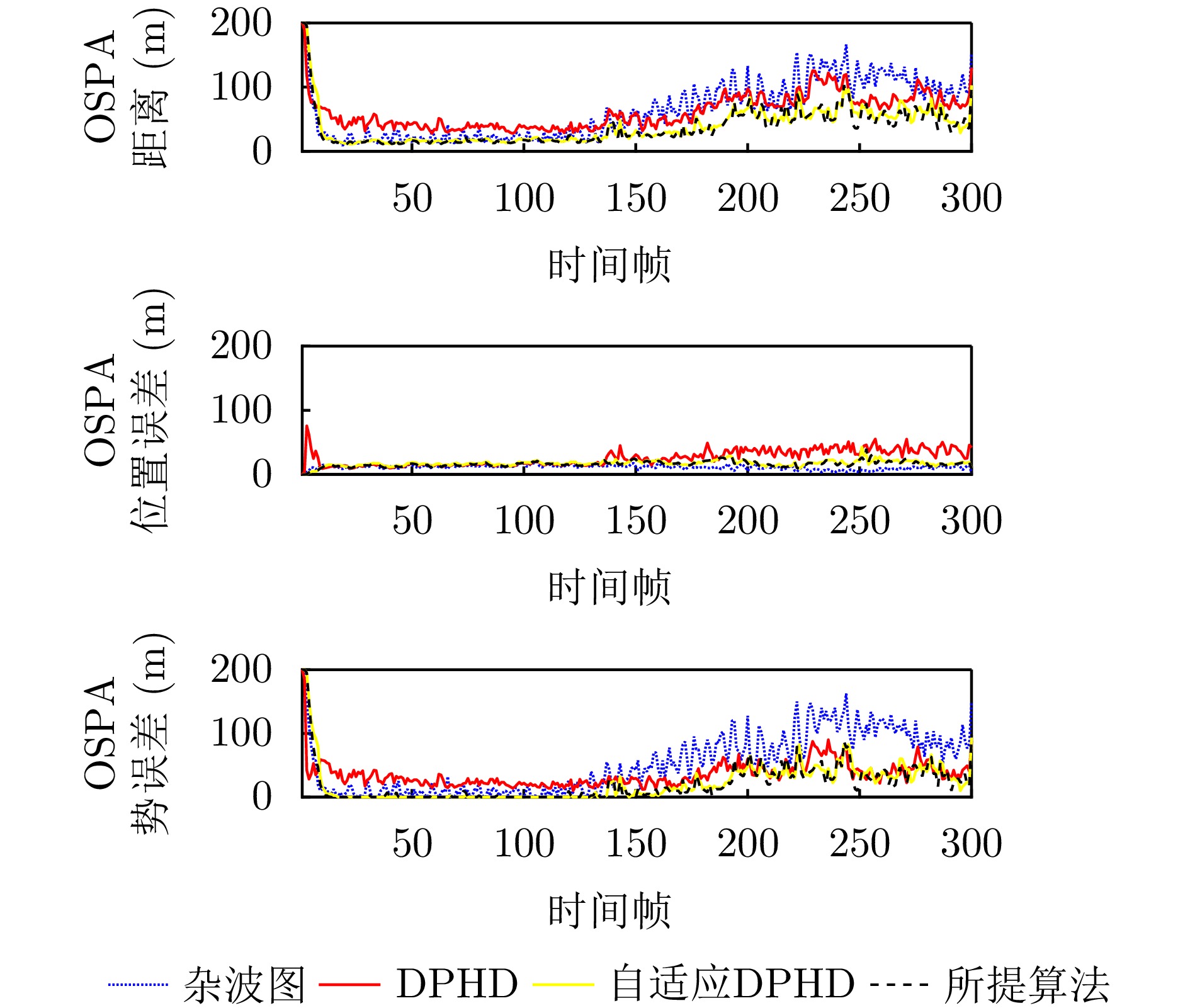
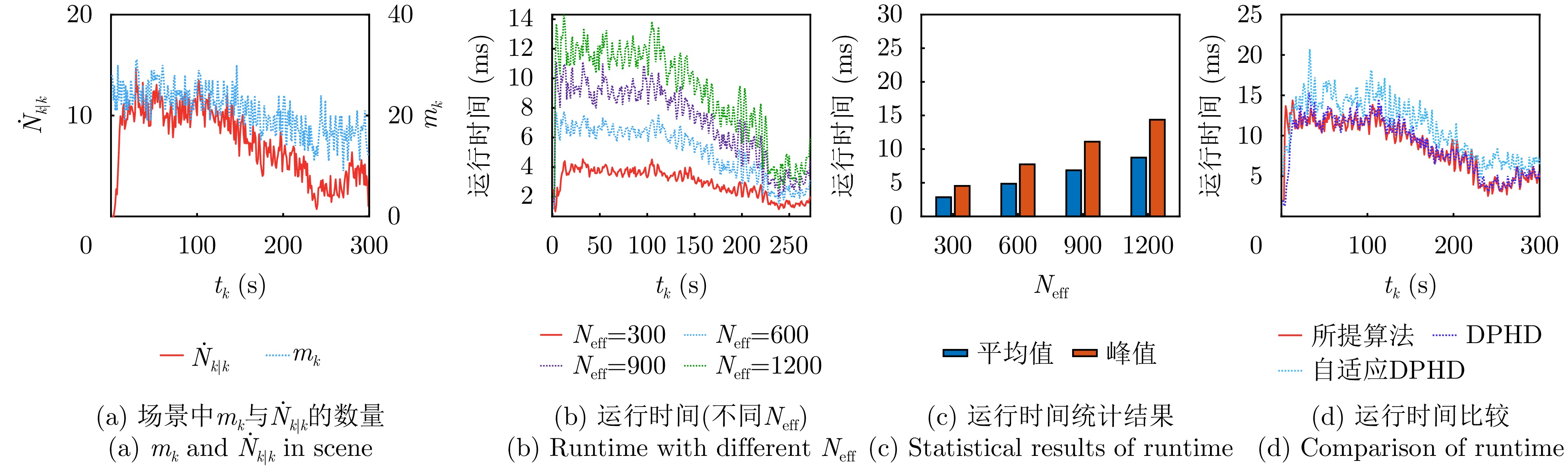
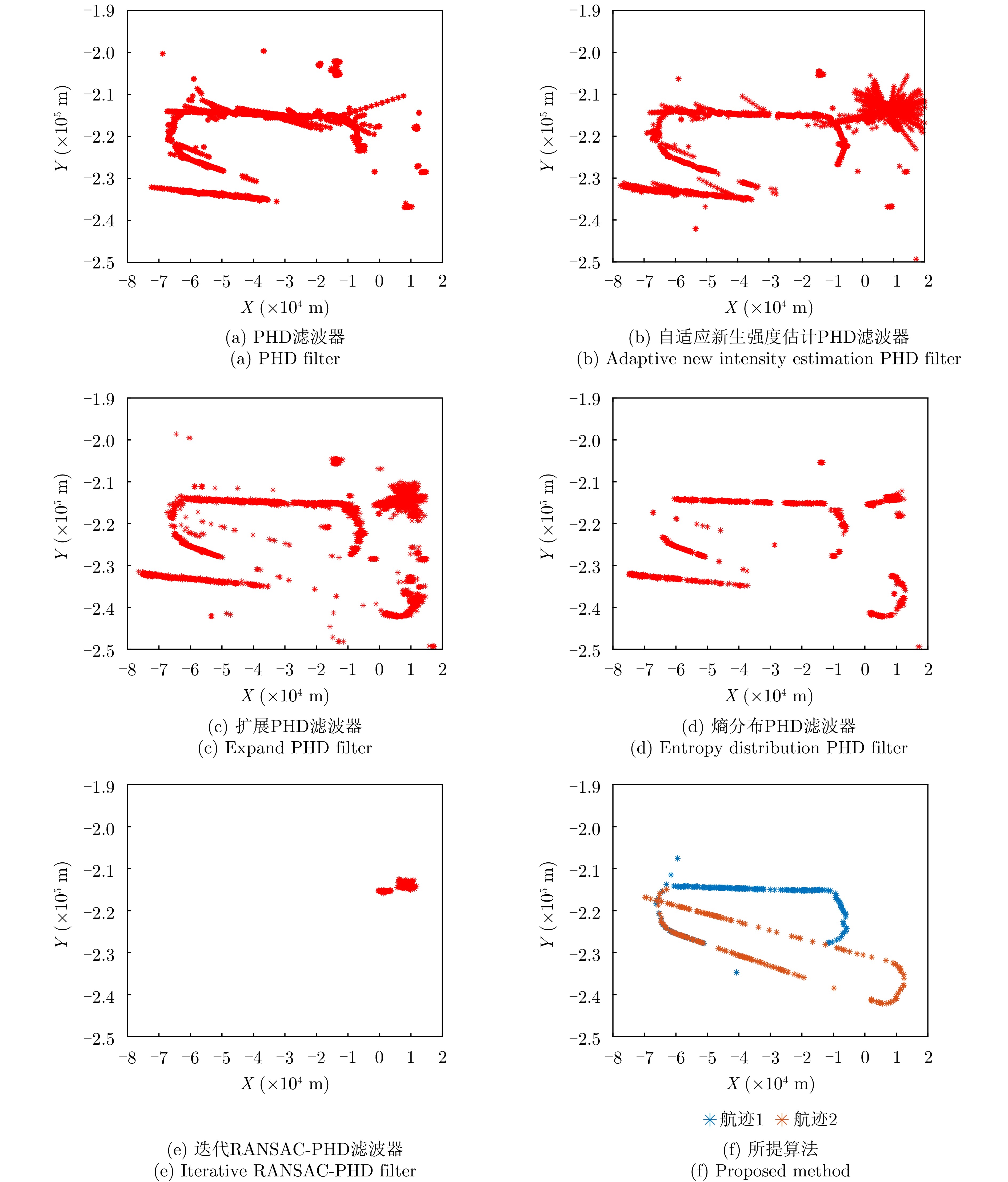
Low-altitude targets, represented by rotor unmanned aerial vehicles, can typically adopt a slow-cruise mode. As a result, their echoes fall within the Doppler Blind Zone (DBZ) and evade radar detection and tracking. The cluttered low-altitude environment adds to further complexity. To address this issue, this study proposes a method grounded in the framework of random finite set and designed for tracking slow-moving targets with a low-altitude surveillance radar. Inspired by the Bayesian occupancy filter, the proposed method initially models the radar Field of View (FoV) as a grid map. It is uniformly partitioned along the angle-range axis, ensuring that each cell captures a specific segment of the FoV. Then, adaptive filtering parameter modules are meticulously designed by leveraging the distinct dynamic characteristics of slow-moving targets and ground clutter. Subsequently, a probability hypothesis density filter is deployed to conduct unified filtering on the grid map situated within the DBZ. The final step involves the use of clustering methods to extract information about the target of interest. Simulation results validate the effectiveness, robustness, and superior performance of the proposed method across typical surveillance scenarios involving multiple slow-moving targets, noise, and clutter.
Low-altitude targets, represented by rotor unmanned aerial vehicles, can typically adopt a slow-cruise mode. As a result, their echoes fall within the Doppler Blind Zone (DBZ) and evade radar detection and tracking. The cluttered low-altitude environment adds to further complexity. To address this issue, this study proposes a method grounded in the framework of random finite set and designed for tracking slow-moving targets with a low-altitude surveillance radar. Inspired by the Bayesian occupancy filter, the proposed method initially models the radar Field of View (FoV) as a grid map. It is uniformly partitioned along the angle-range axis, ensuring that each cell captures a specific segment of the FoV. Then, adaptive filtering parameter modules are meticulously designed by leveraging the distinct dynamic characteristics of slow-moving targets and ground clutter. Subsequently, a probability hypothesis density filter is deployed to conduct unified filtering on the grid map situated within the DBZ. The final step involves the use of clustering methods to extract information about the target of interest. Simulation results validate the effectiveness, robustness, and superior performance of the proposed method across typical surveillance scenarios involving multiple slow-moving targets, noise, and clutter.
2026,
15(2):
620-636.
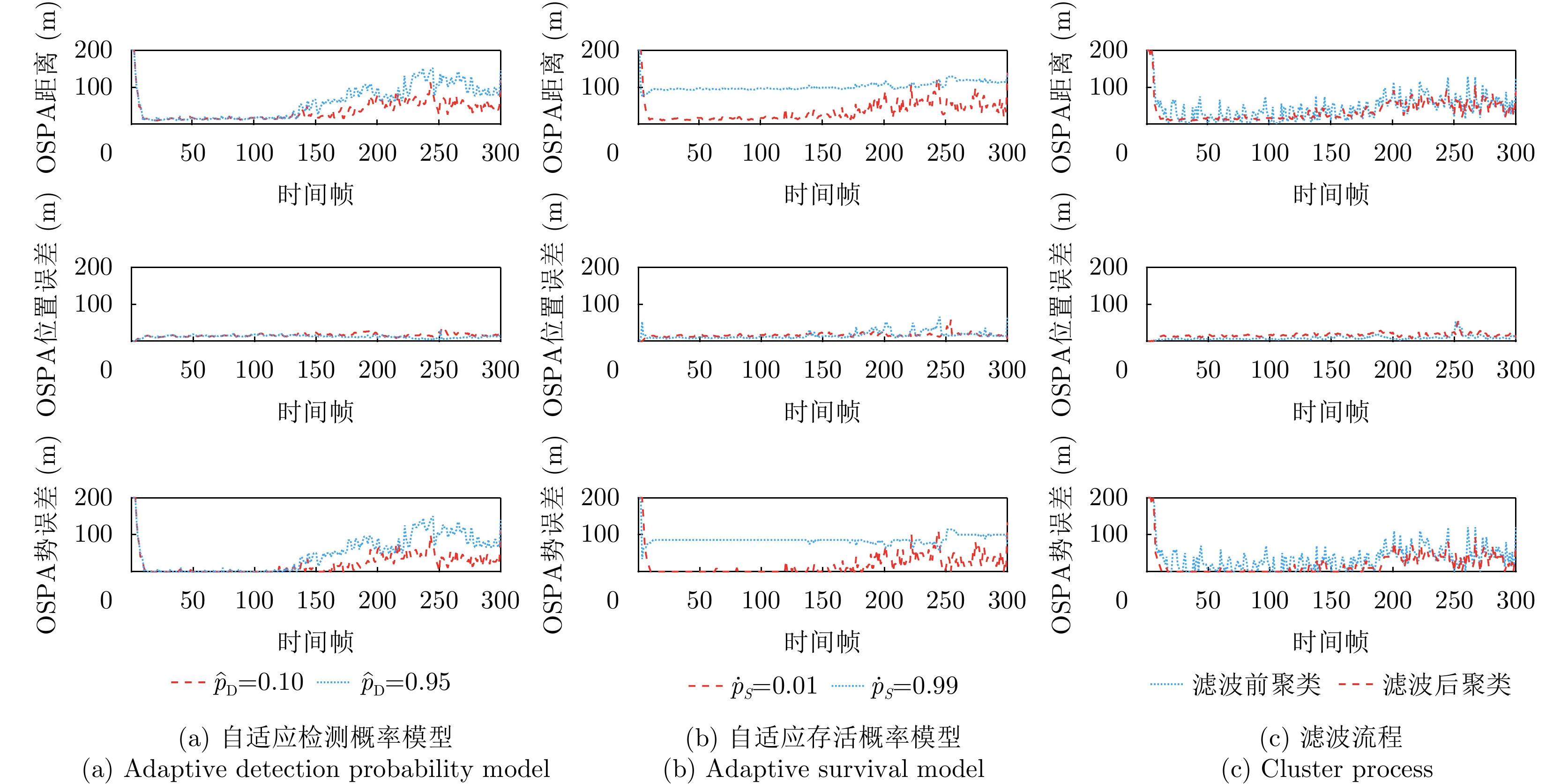
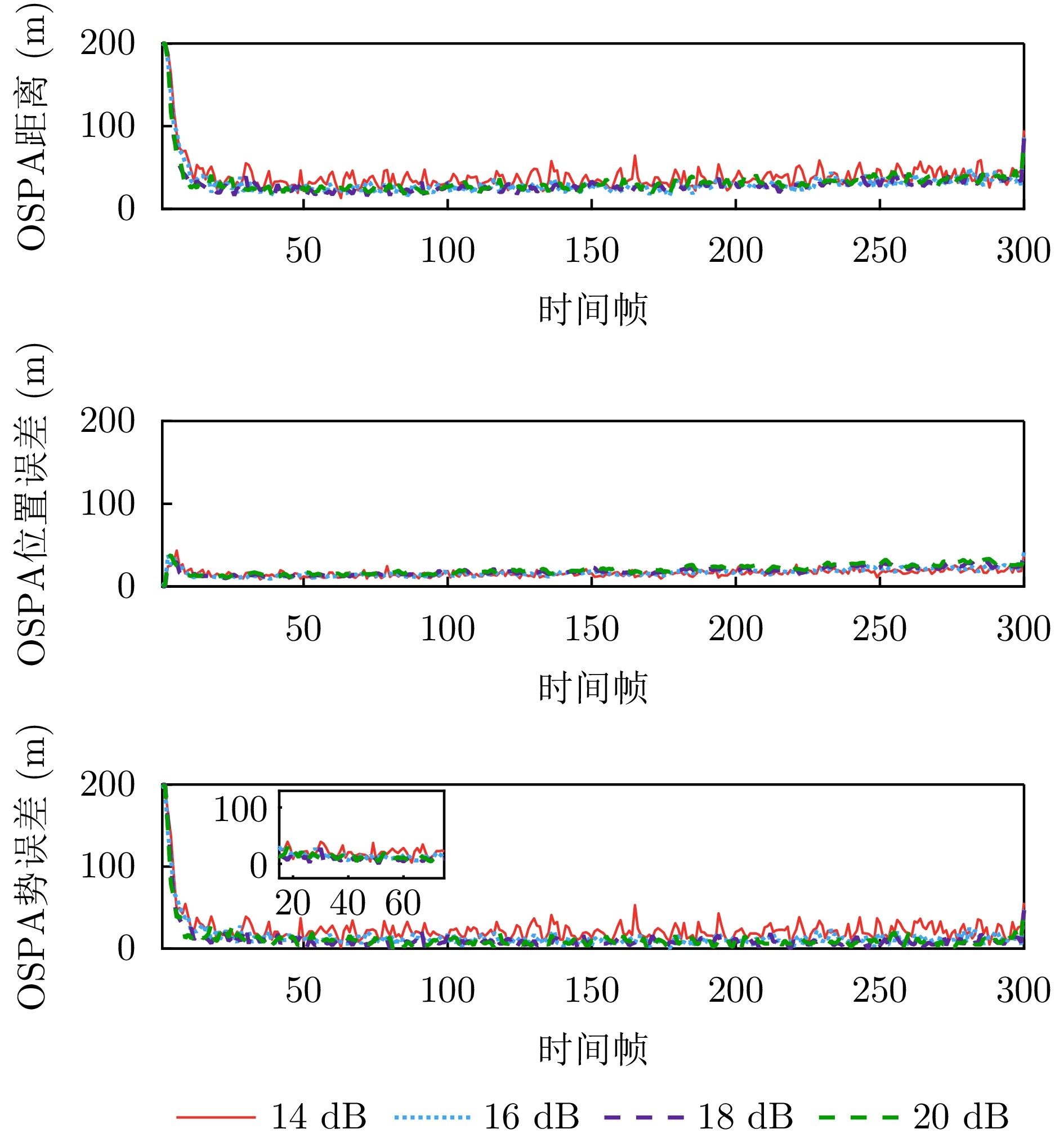
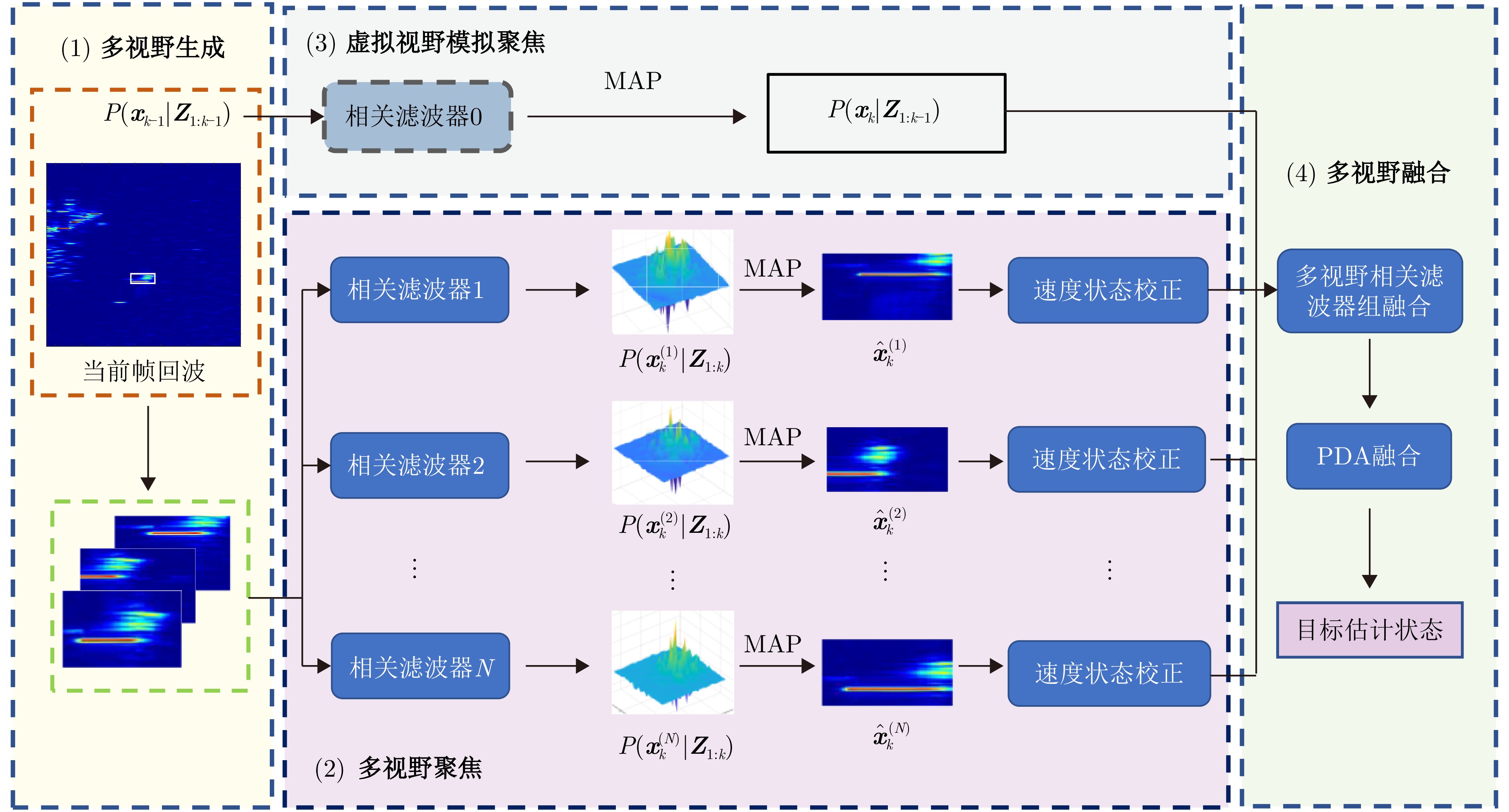
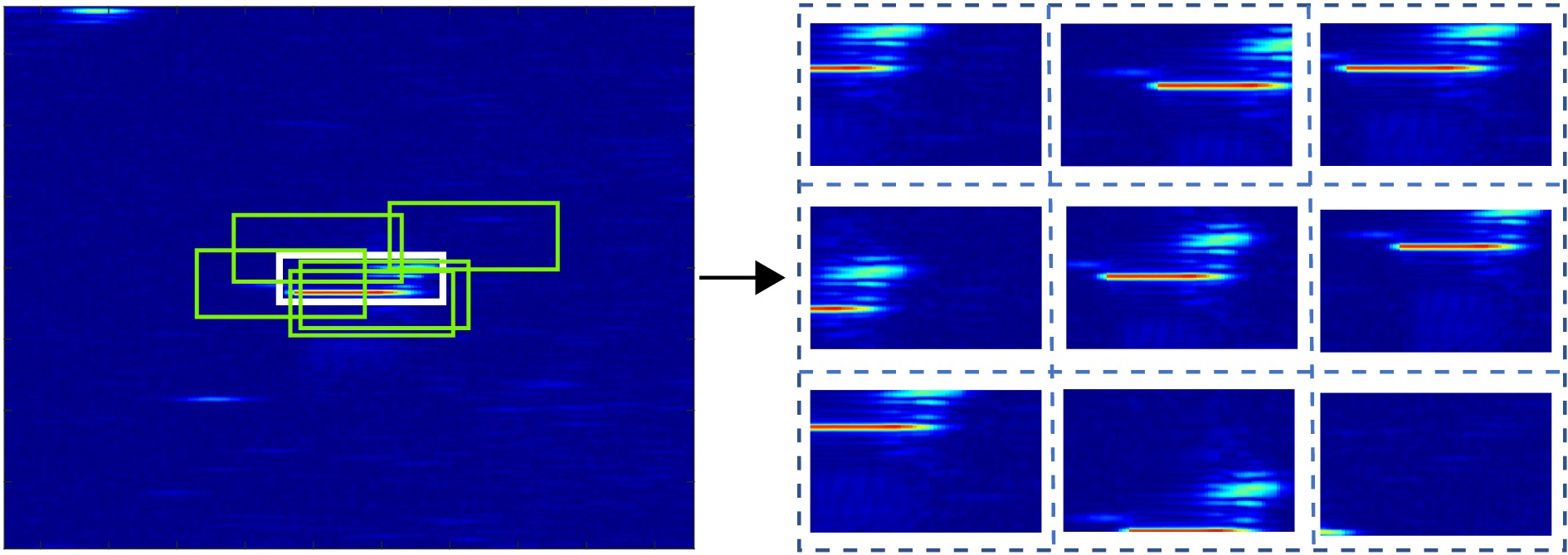
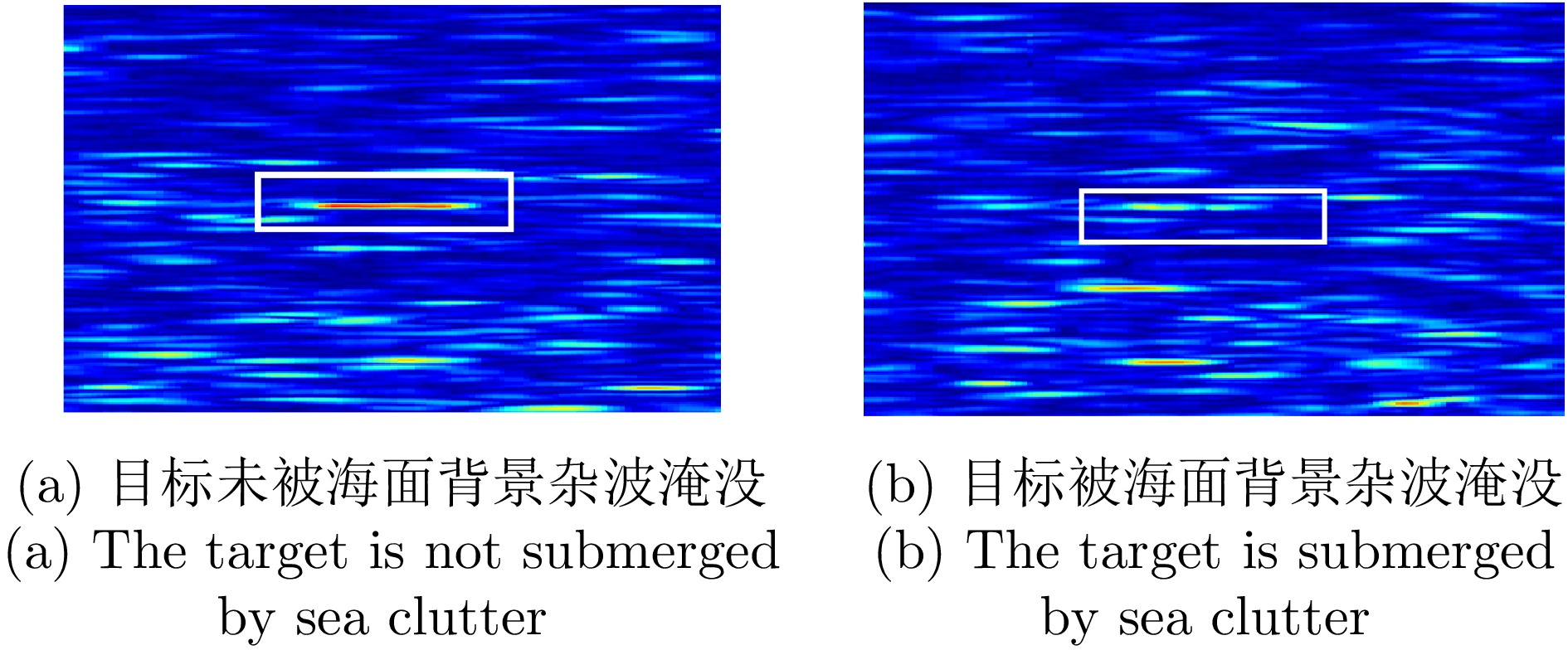
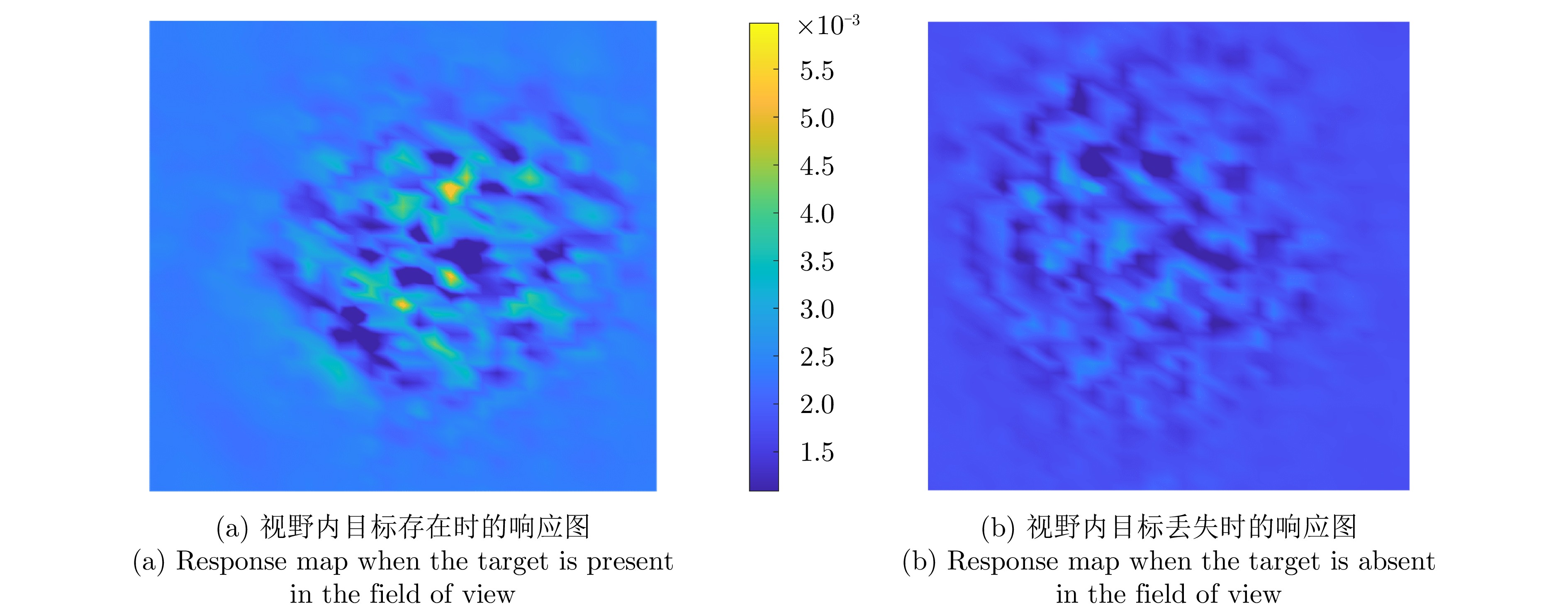
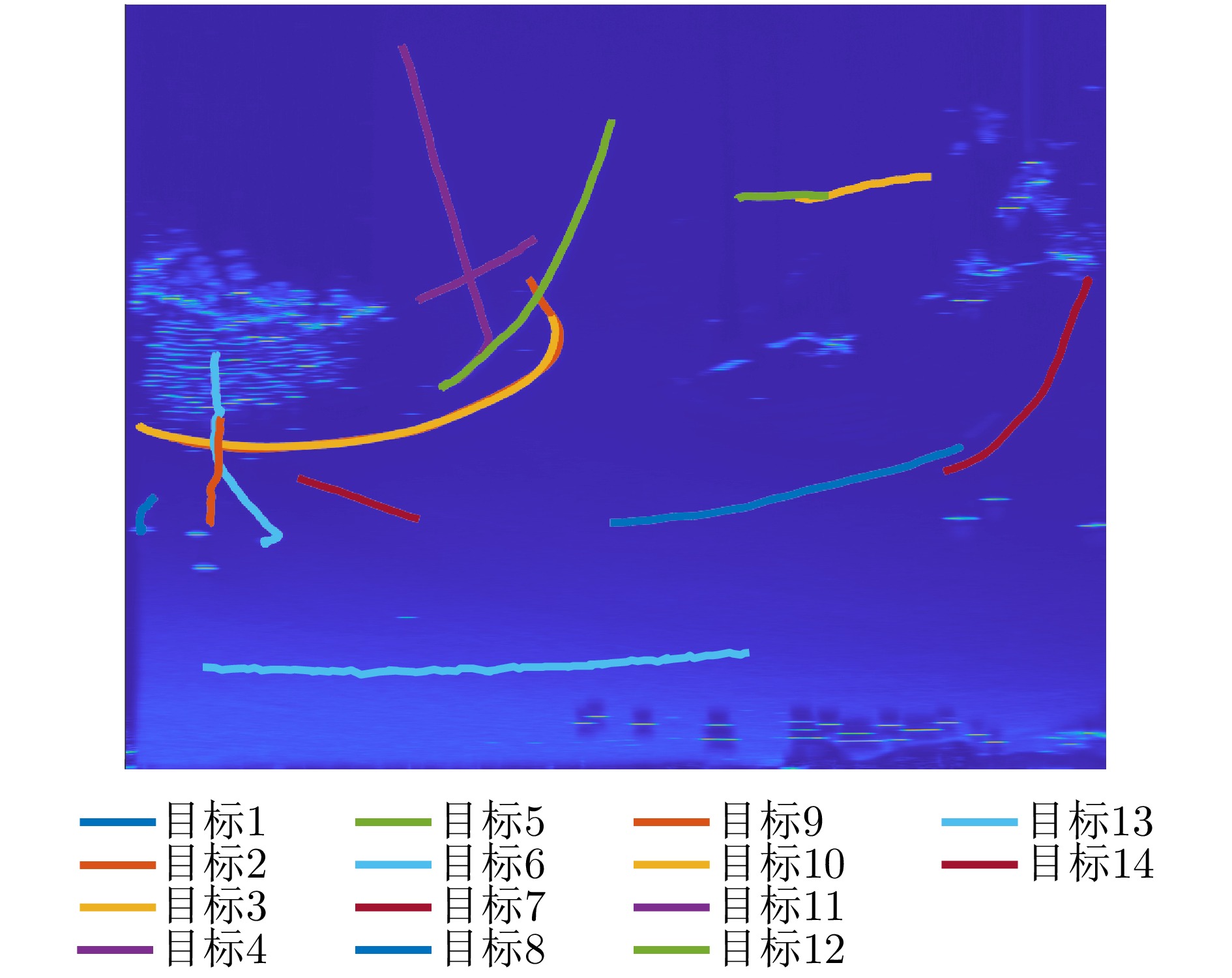
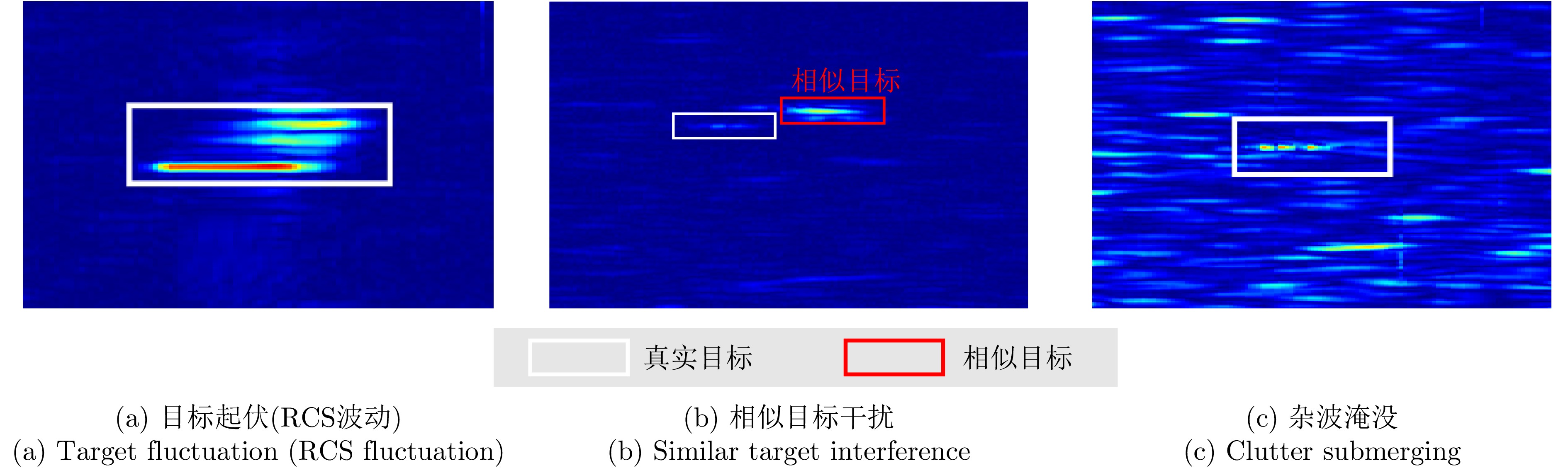
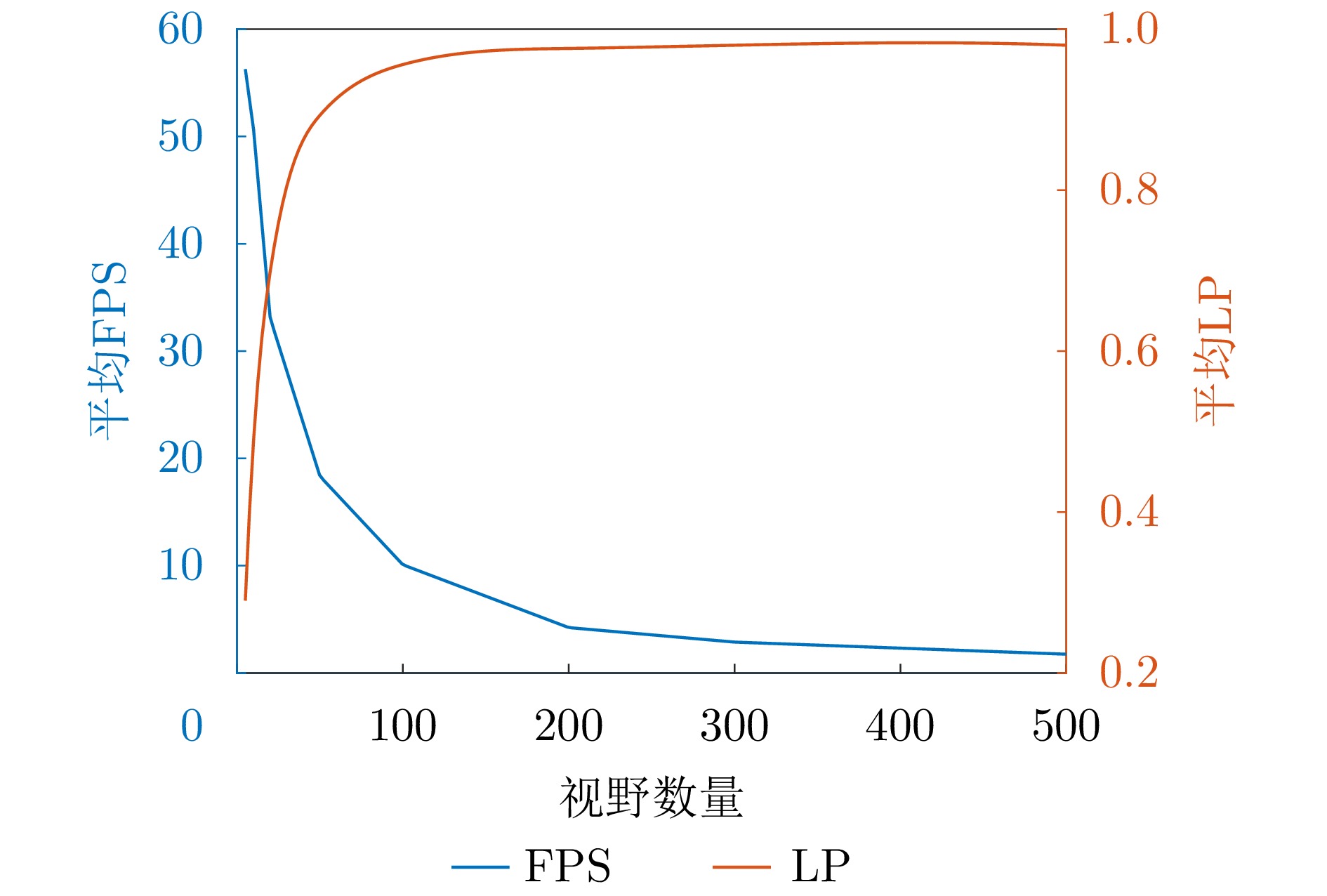
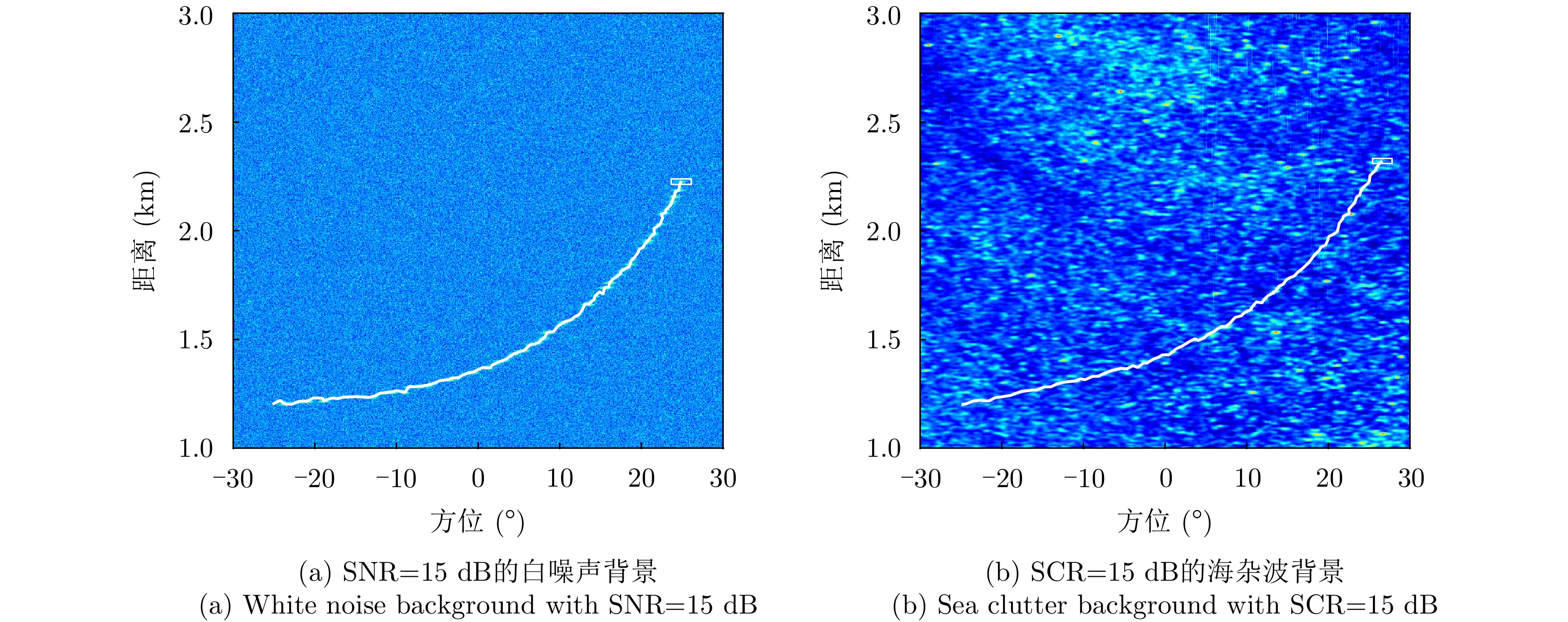
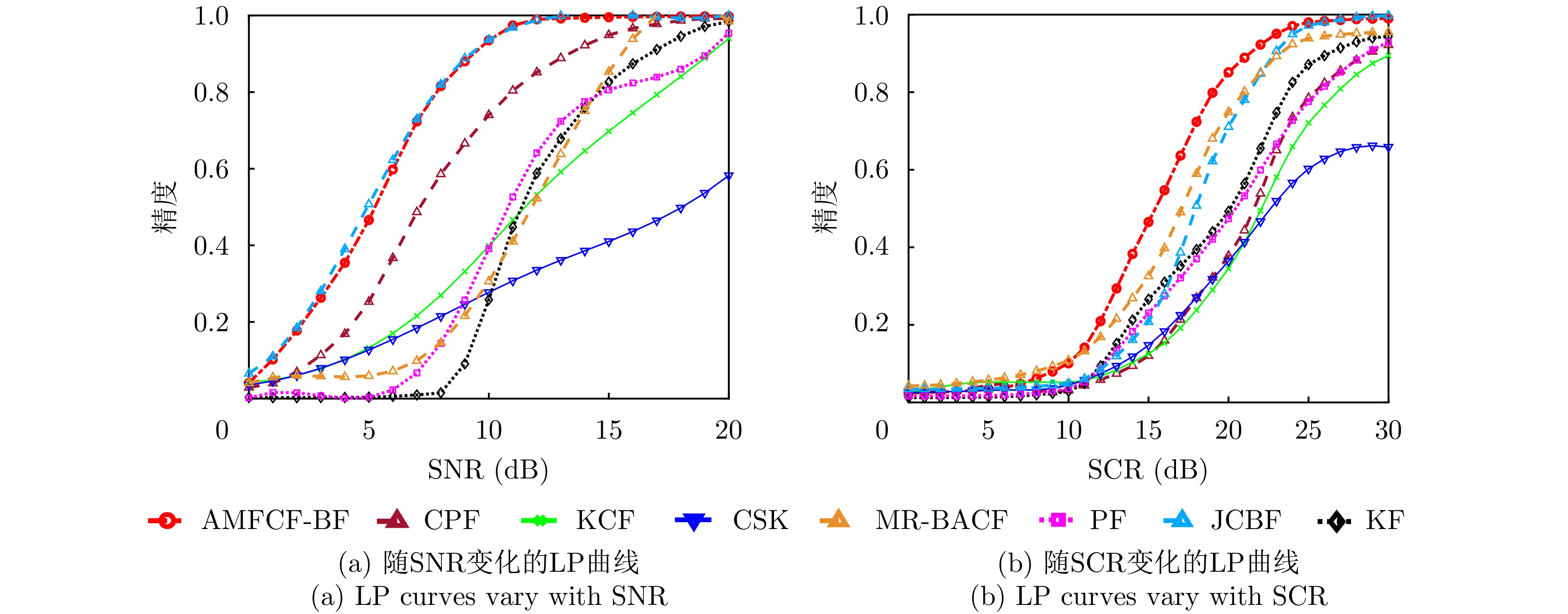
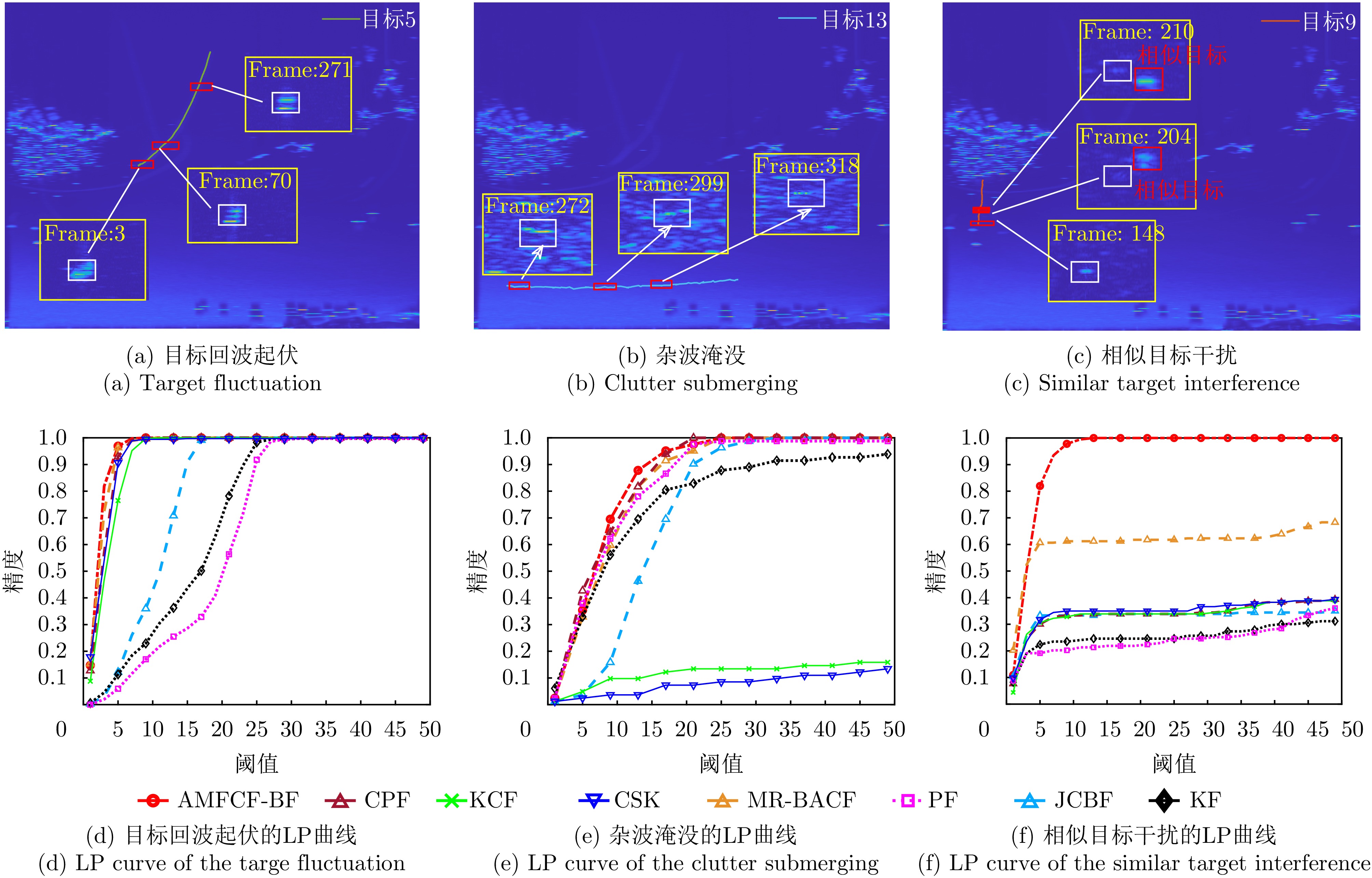
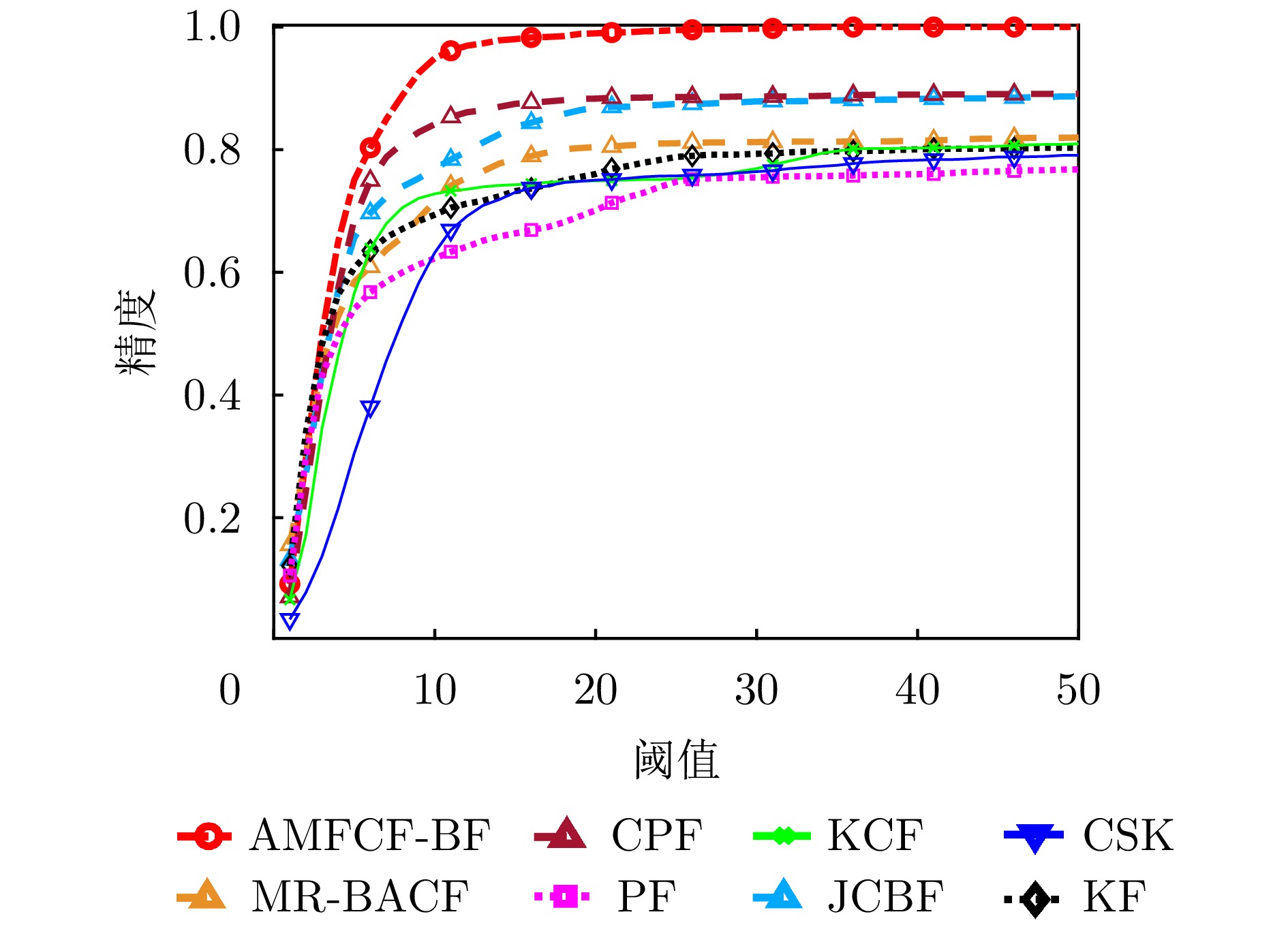
This study addresses the critical challenge of radar target tracking in complex maritime environments. Although conventional feature-aided Bayesian tracking methods have advanced in maritime radar applications, their robustness considerably deteriorates in scenarios with severe sea clutter and interacting targets. To overcome these limitations, an Adaptive Multifocus Correlation Filter with Bayesian Fusion (AMFCF-BF) is proposed herein. The method constructs multiple subviews within the probabilistic distribution of the target state, with each subview assigned an independent correlation filter to generate a local response map, enabling multihypothesis state modeling. During iterative tracking, these response maps are used to estimate states and dynamically guide the focusing of subviews toward high-confidence regions, enhancing adaptability to complex target maneuvers. To further mitigate false alarms and missed detections caused by strong sea clutter, a virtual-view simulation based focusing model is developed, which effectively suppresses filter drift under adverse conditions. Finally, all subview responses are fused within a Bayesian multimeasurement framework to produce a globally consistent target-state estimate. Experimental results using simulated and real maritime radar data demonstrate that the proposed AMFCF-BF achieves an average center location error of 3.47 pixels, reducing tracking error by ~70% compared with typical feature-assisted correlation filtering methods. In terms of location precision, the proposed filter achieves an overall improvement of ~21%, showing significantly enhanced tracking accuracy and anti-interference performance, validating the effectiveness of the multifocus correlation filtering mechanism and Bayesian fusion strategy.
This study addresses the critical challenge of radar target tracking in complex maritime environments. Although conventional feature-aided Bayesian tracking methods have advanced in maritime radar applications, their robustness considerably deteriorates in scenarios with severe sea clutter and interacting targets. To overcome these limitations, an Adaptive Multifocus Correlation Filter with Bayesian Fusion (AMFCF-BF) is proposed herein. The method constructs multiple subviews within the probabilistic distribution of the target state, with each subview assigned an independent correlation filter to generate a local response map, enabling multihypothesis state modeling. During iterative tracking, these response maps are used to estimate states and dynamically guide the focusing of subviews toward high-confidence regions, enhancing adaptability to complex target maneuvers. To further mitigate false alarms and missed detections caused by strong sea clutter, a virtual-view simulation based focusing model is developed, which effectively suppresses filter drift under adverse conditions. Finally, all subview responses are fused within a Bayesian multimeasurement framework to produce a globally consistent target-state estimate. Experimental results using simulated and real maritime radar data demonstrate that the proposed AMFCF-BF achieves an average center location error of 3.47 pixels, reducing tracking error by ~70% compared with typical feature-assisted correlation filtering methods. In terms of location precision, the proposed filter achieves an overall improvement of ~21%, showing significantly enhanced tracking accuracy and anti-interference performance, validating the effectiveness of the multifocus correlation filtering mechanism and Bayesian fusion strategy.
2026,
15(2):
637-649.
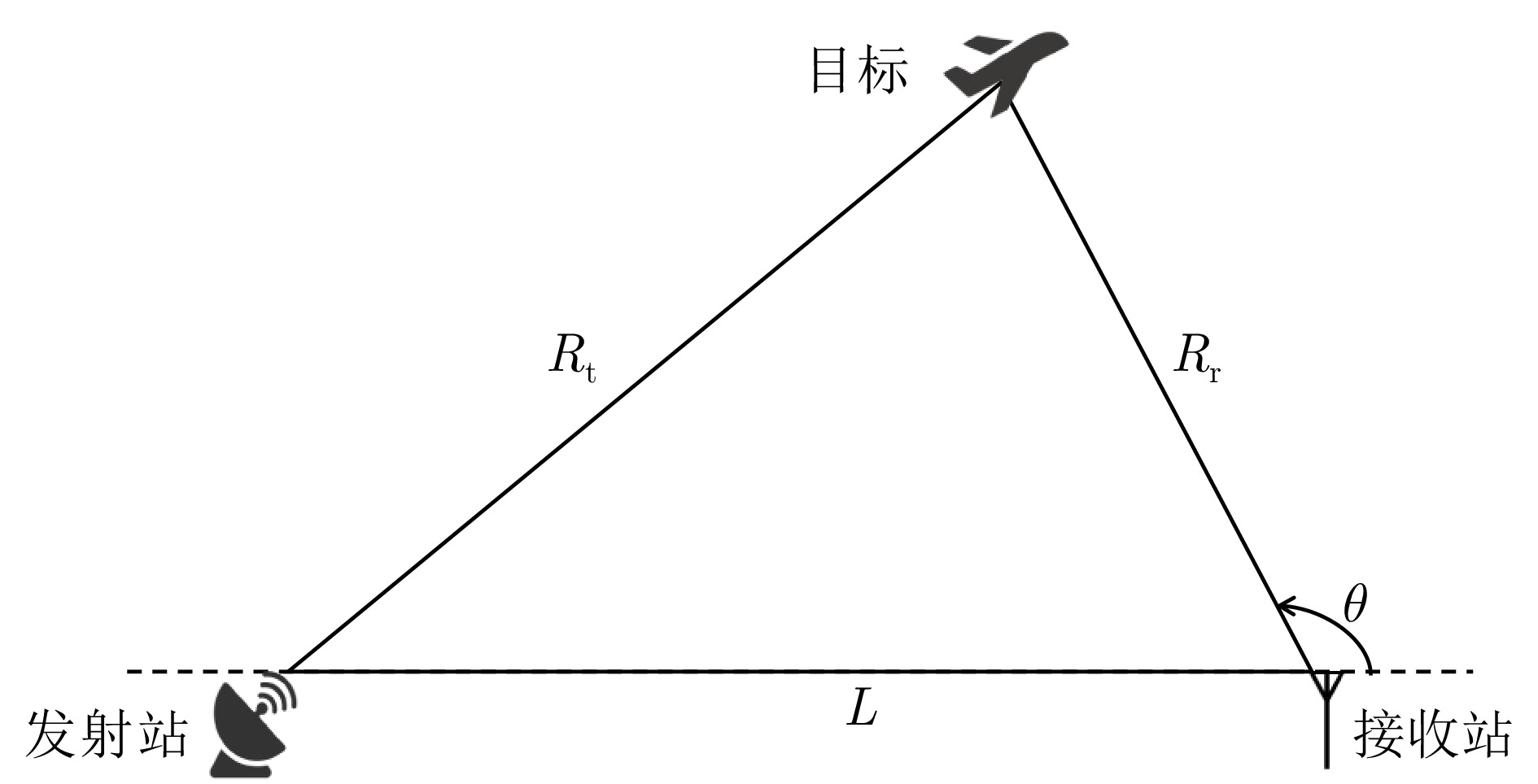
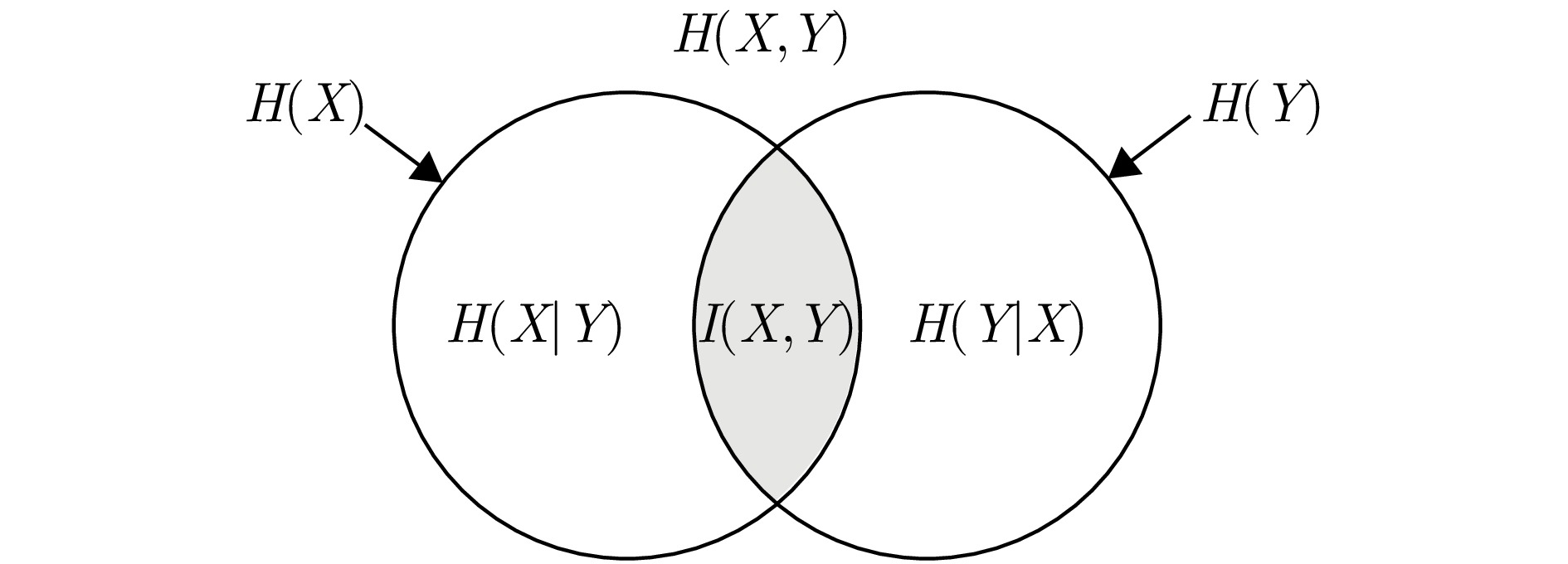
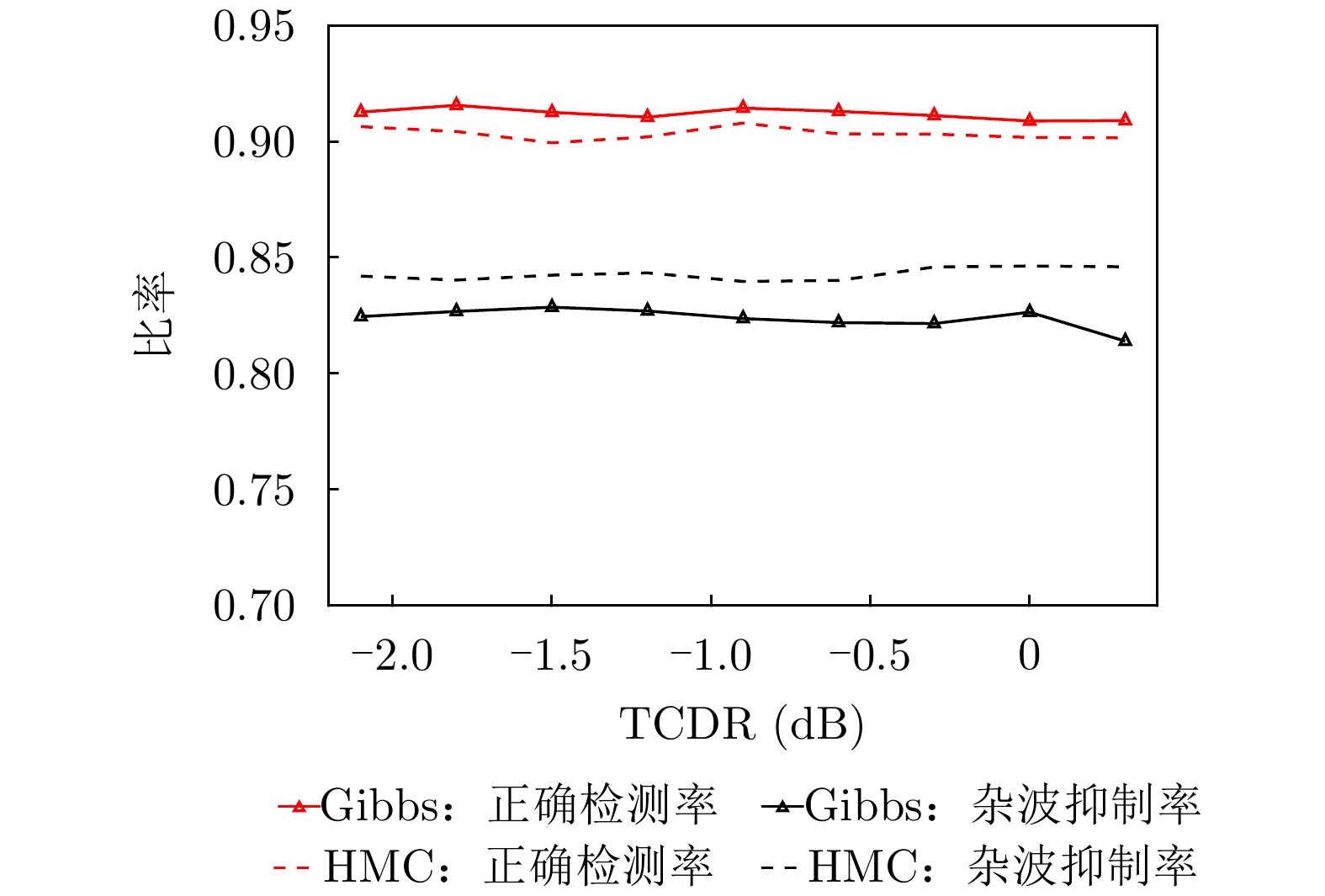
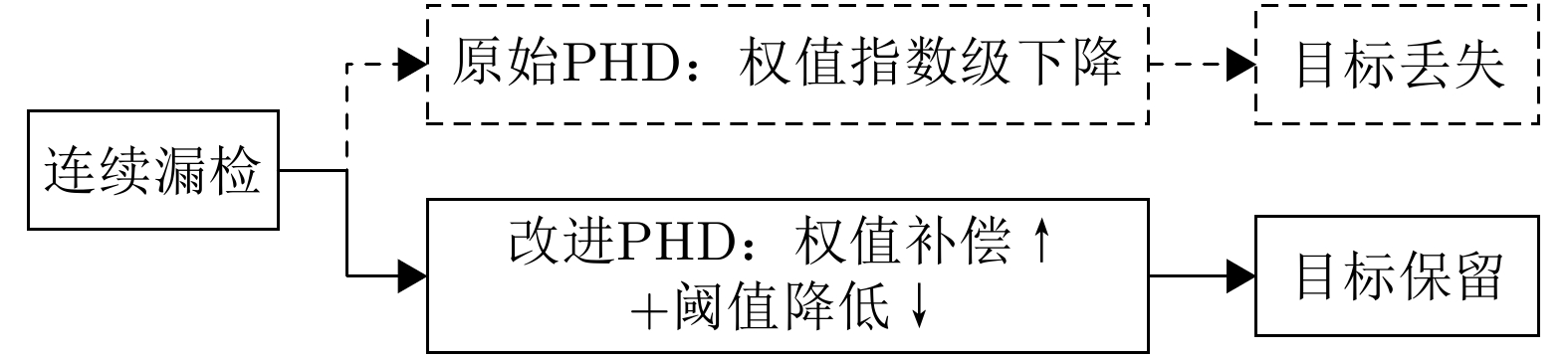
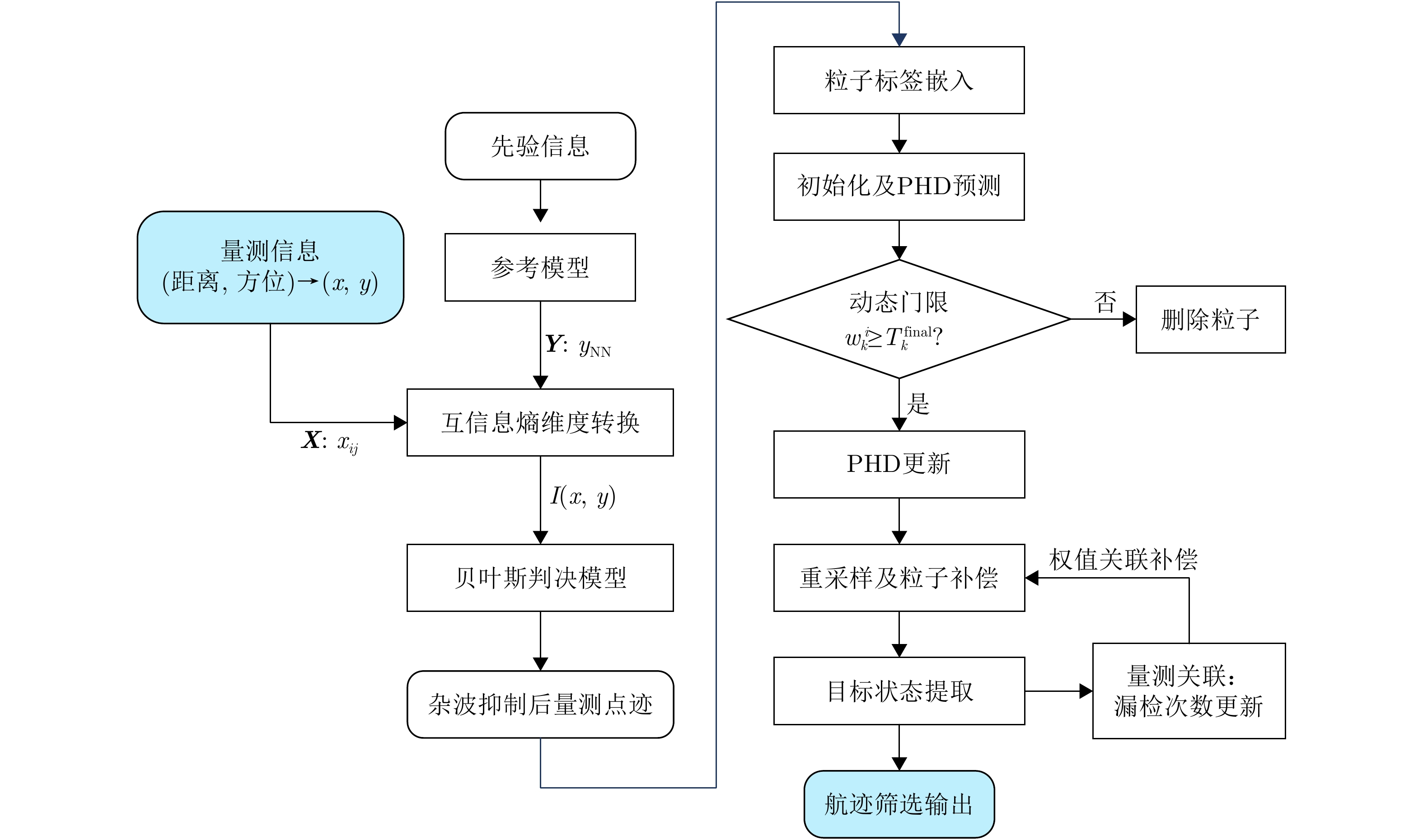
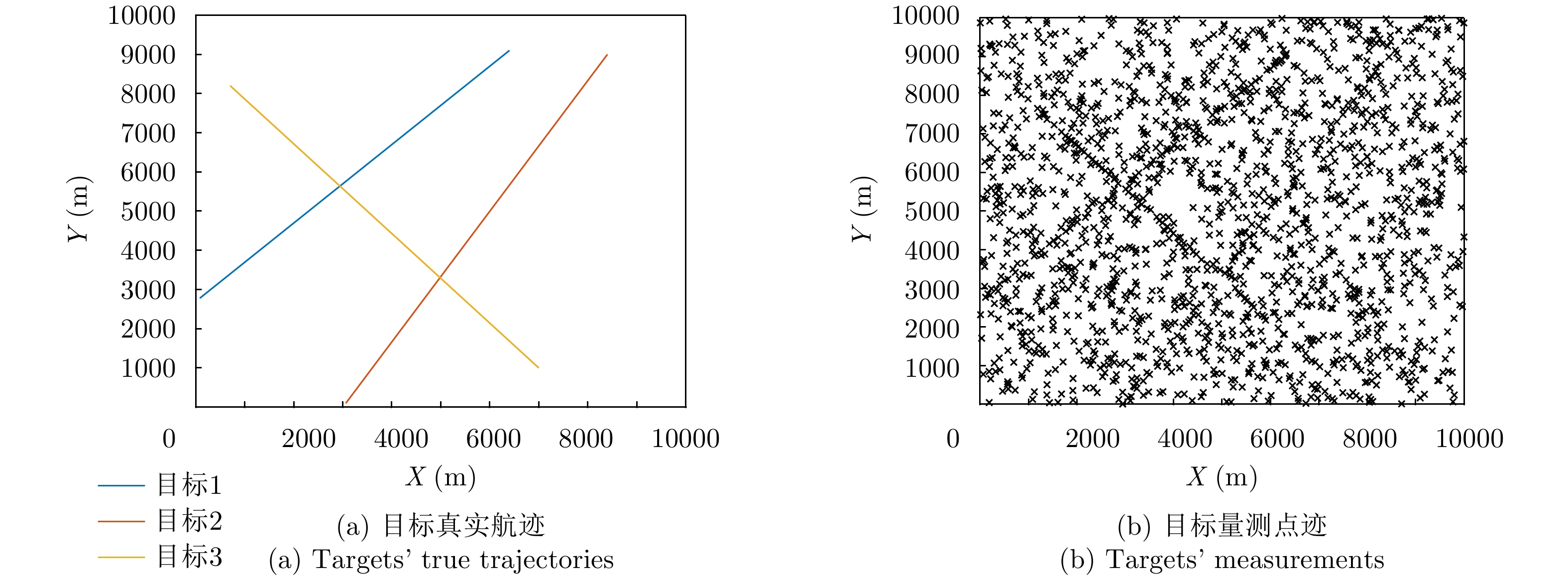
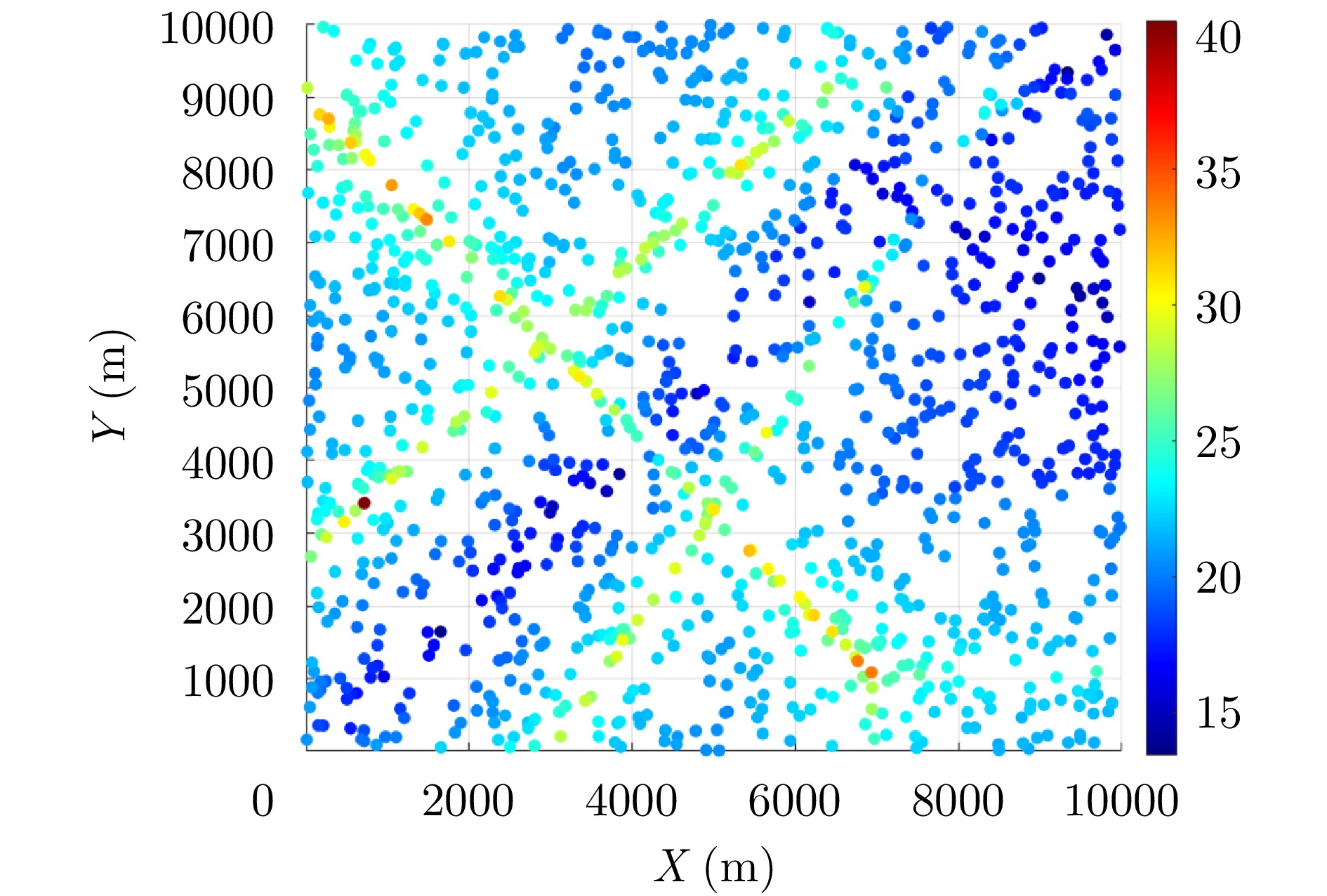
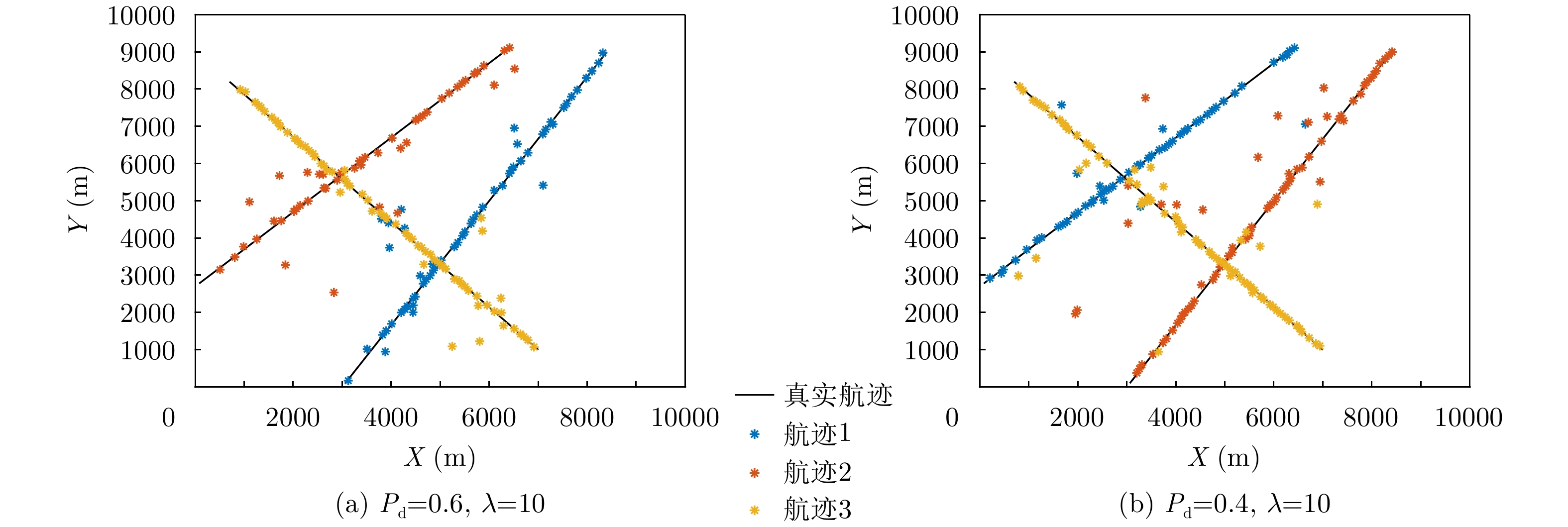
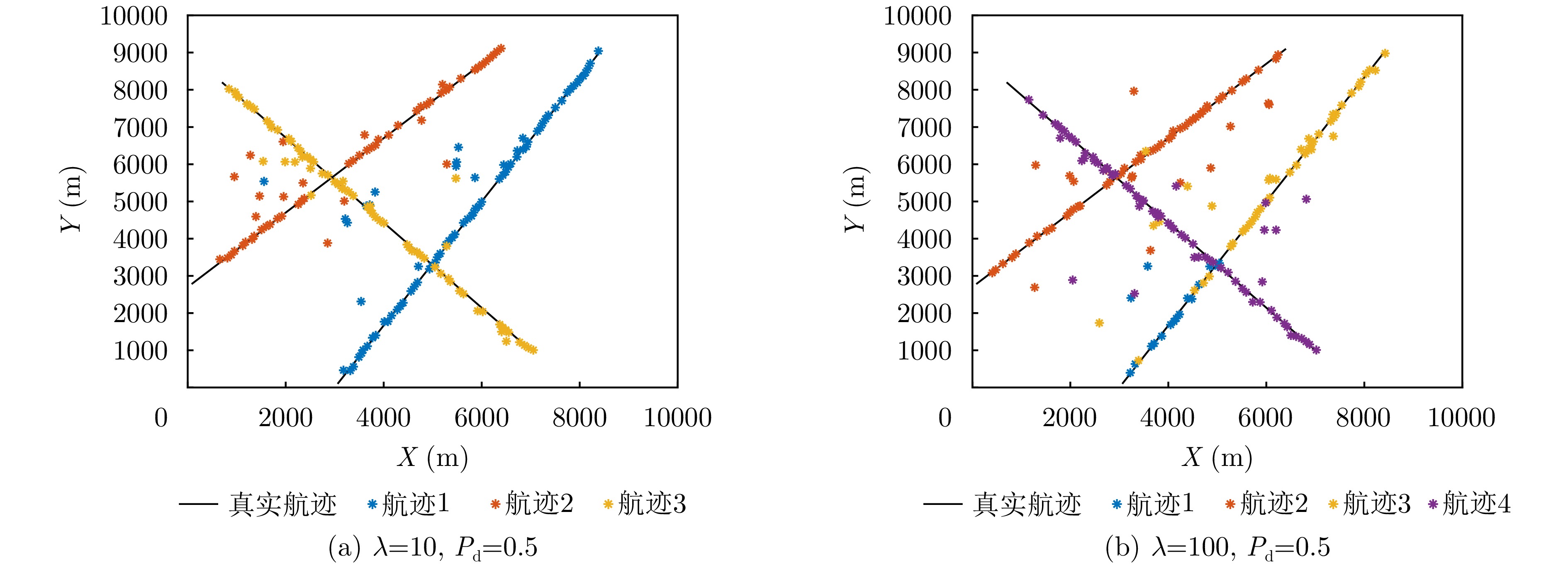
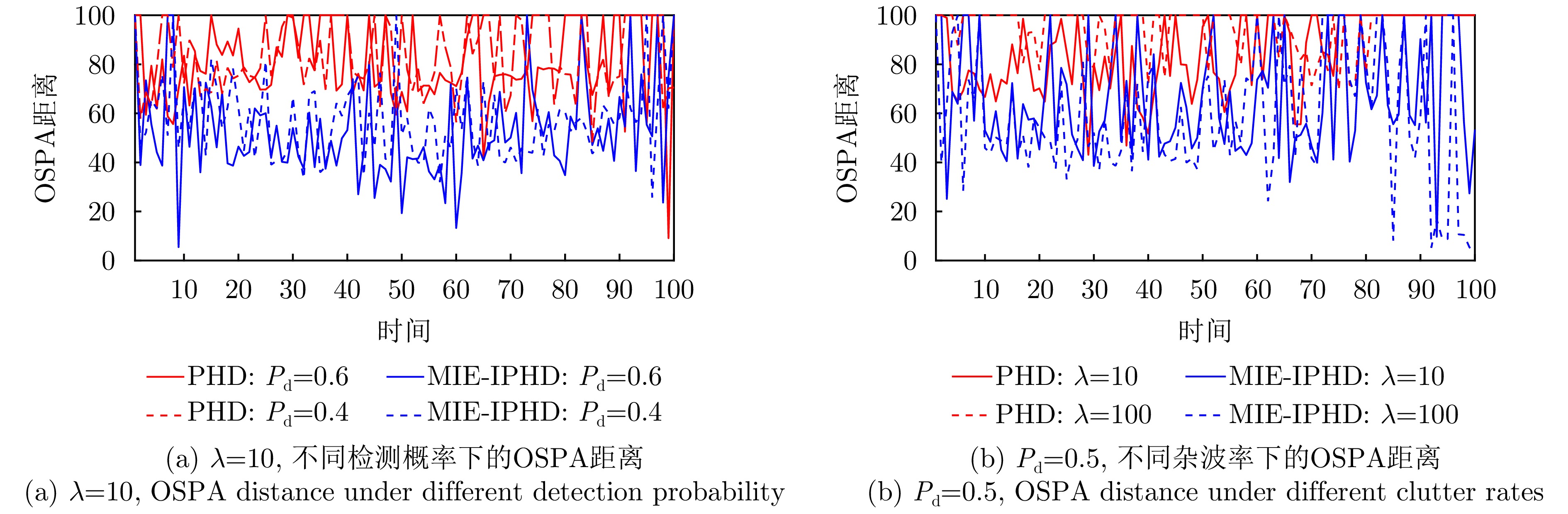
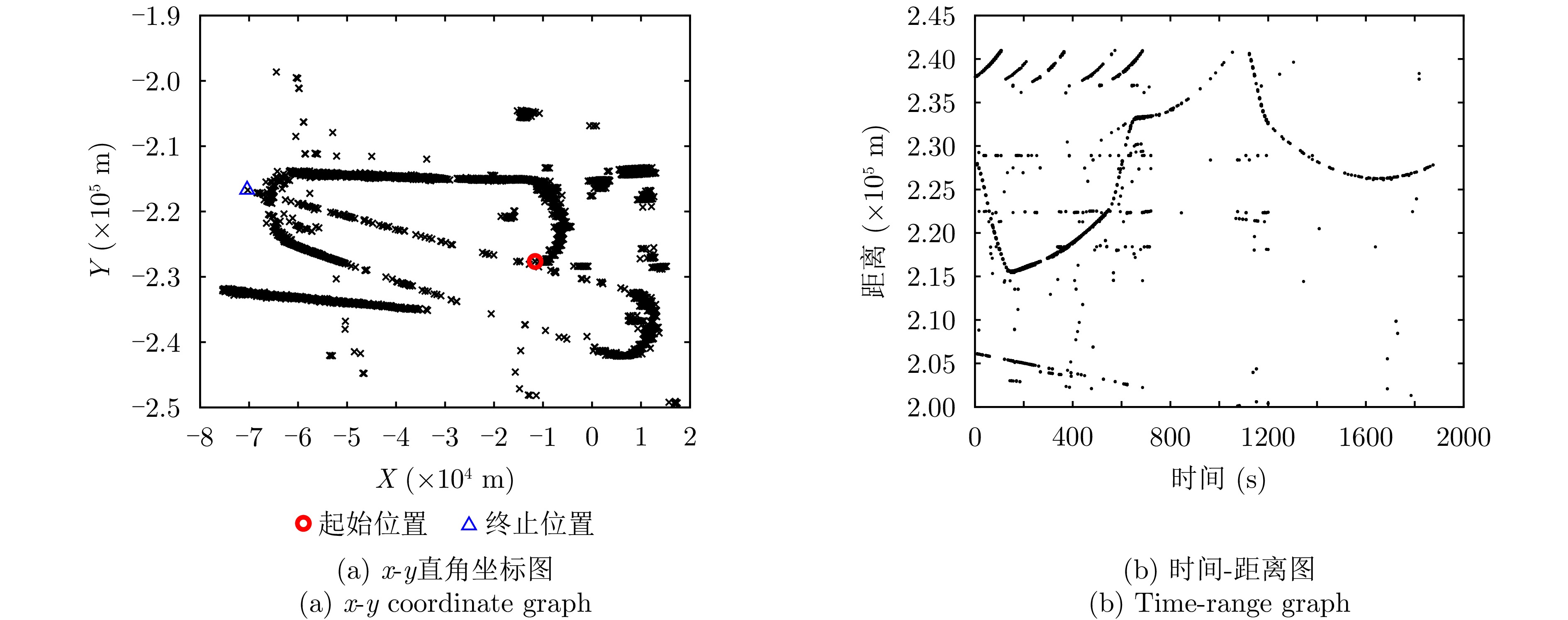
This study proposes a processing framework based on Mutual Information Entropy (MIE) and an improved probability hypothesis density filter to address the key challenges—high clutter density and low detection probability—in Passive Bistatic Radar (PBR) target tracking. First, statistical differences in the correlation between target and clutter points, as well as between reference models, are quantified as mutual information entropy values, which are then used to eliminate clutter points. Second, the classical probability hypothesis density filter is improved through dynamic weight compensation, mitigating particle weight degeneration and reducing the deletion of false targets. This approach effectively resolves issues such as track fragmentation and target loss caused by discontinuous measurements with random intervals under low detection probability. The effectiveness of the proposed framework was verified through simulation experiments, and field test data demonstrated that the proposed method achieves good target-tracking performance in practical applications.
This study proposes a processing framework based on Mutual Information Entropy (MIE) and an improved probability hypothesis density filter to address the key challenges—high clutter density and low detection probability—in Passive Bistatic Radar (PBR) target tracking. First, statistical differences in the correlation between target and clutter points, as well as between reference models, are quantified as mutual information entropy values, which are then used to eliminate clutter points. Second, the classical probability hypothesis density filter is improved through dynamic weight compensation, mitigating particle weight degeneration and reducing the deletion of false targets. This approach effectively resolves issues such as track fragmentation and target loss caused by discontinuous measurements with random intervals under low detection probability. The effectiveness of the proposed framework was verified through simulation experiments, and field test data demonstrated that the proposed method achieves good target-tracking performance in practical applications.
2026,
15(2):
650-661.
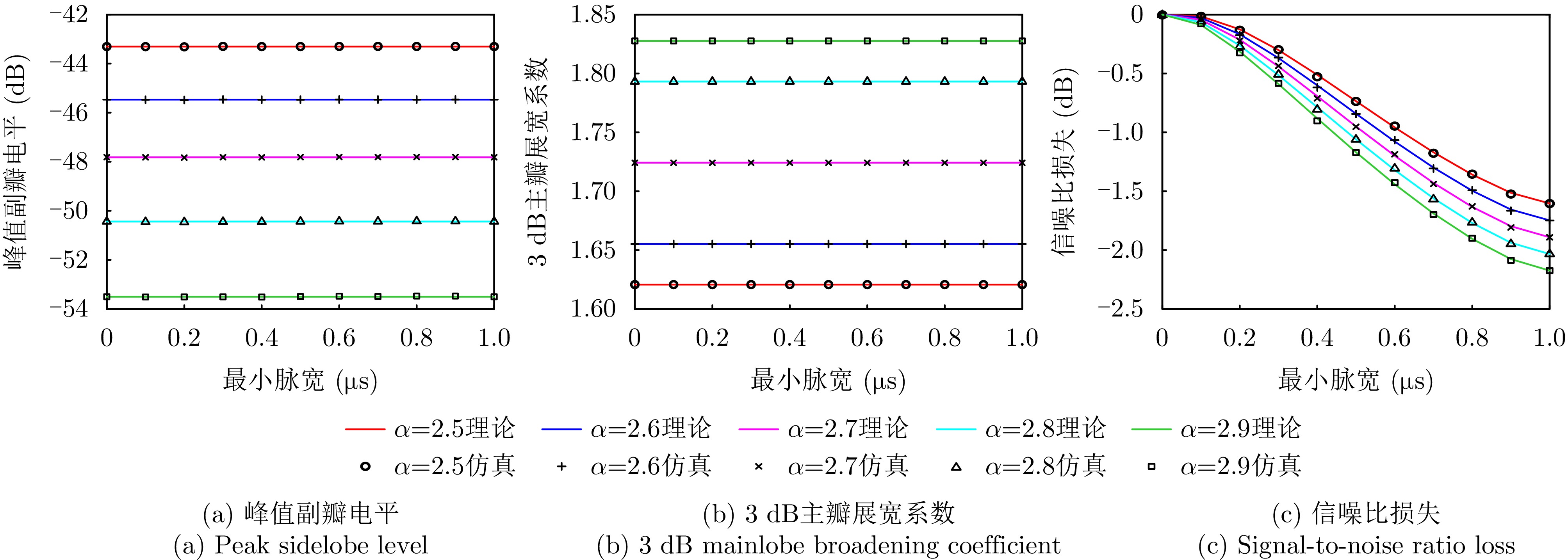
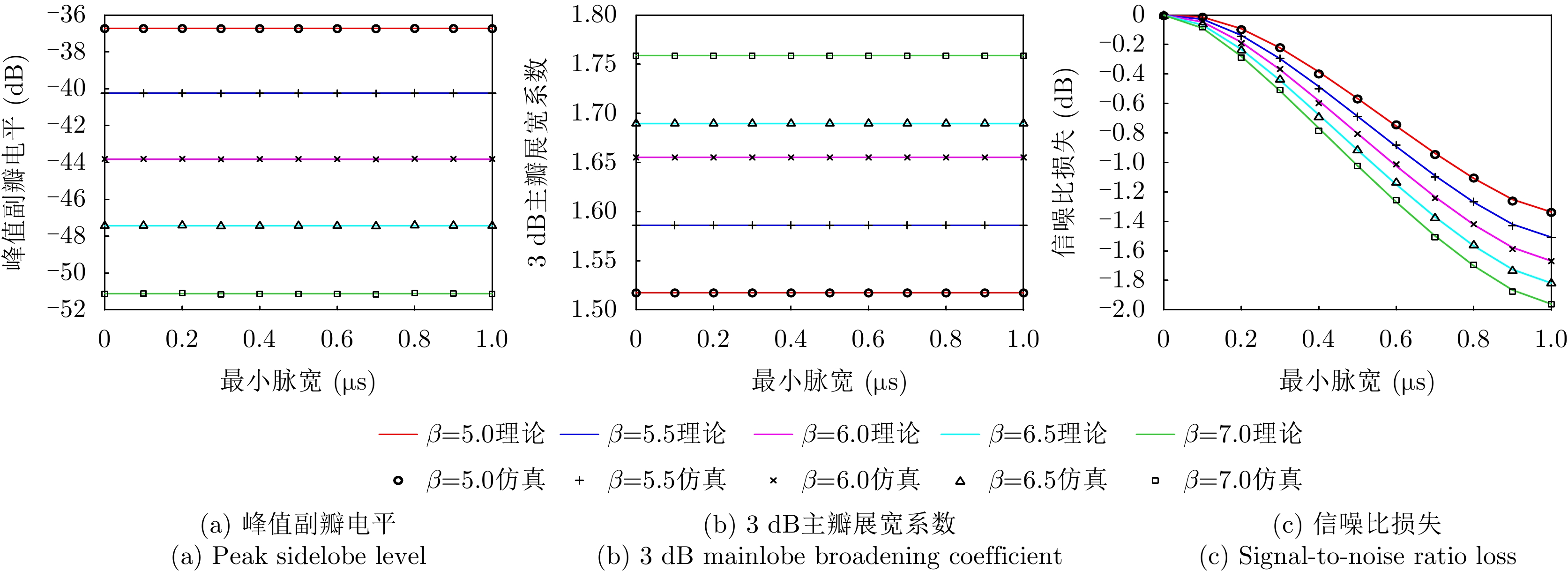
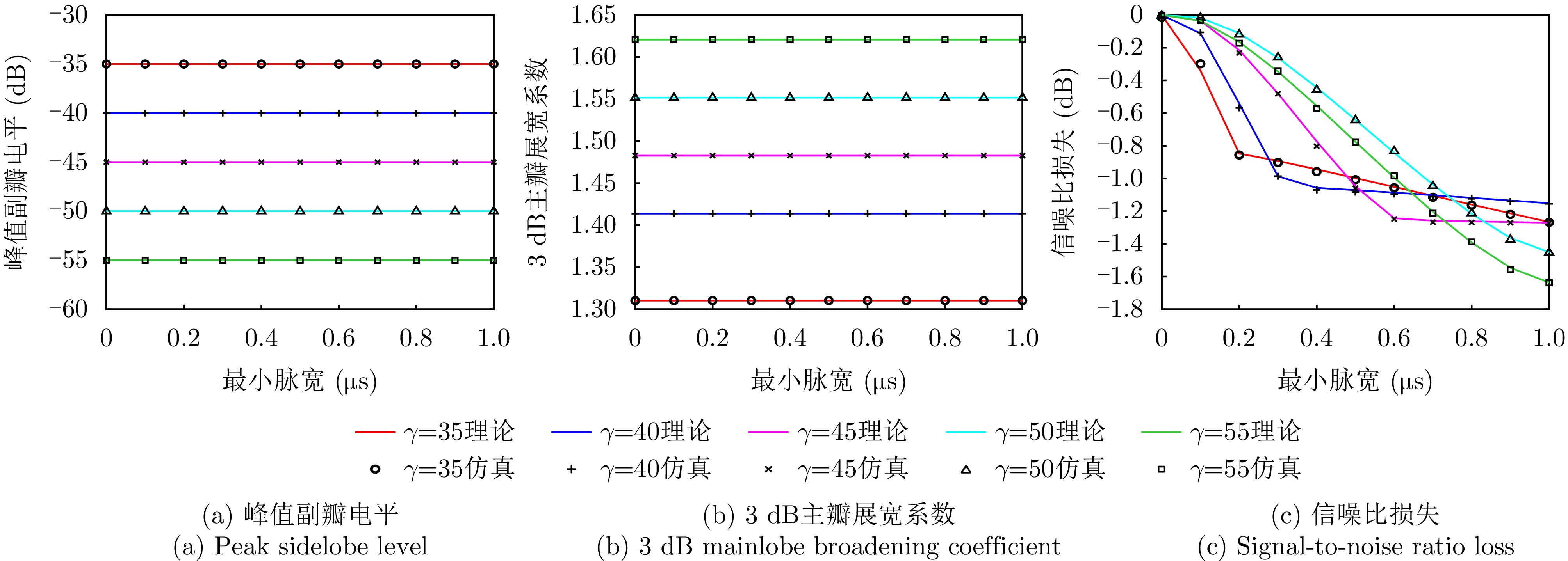
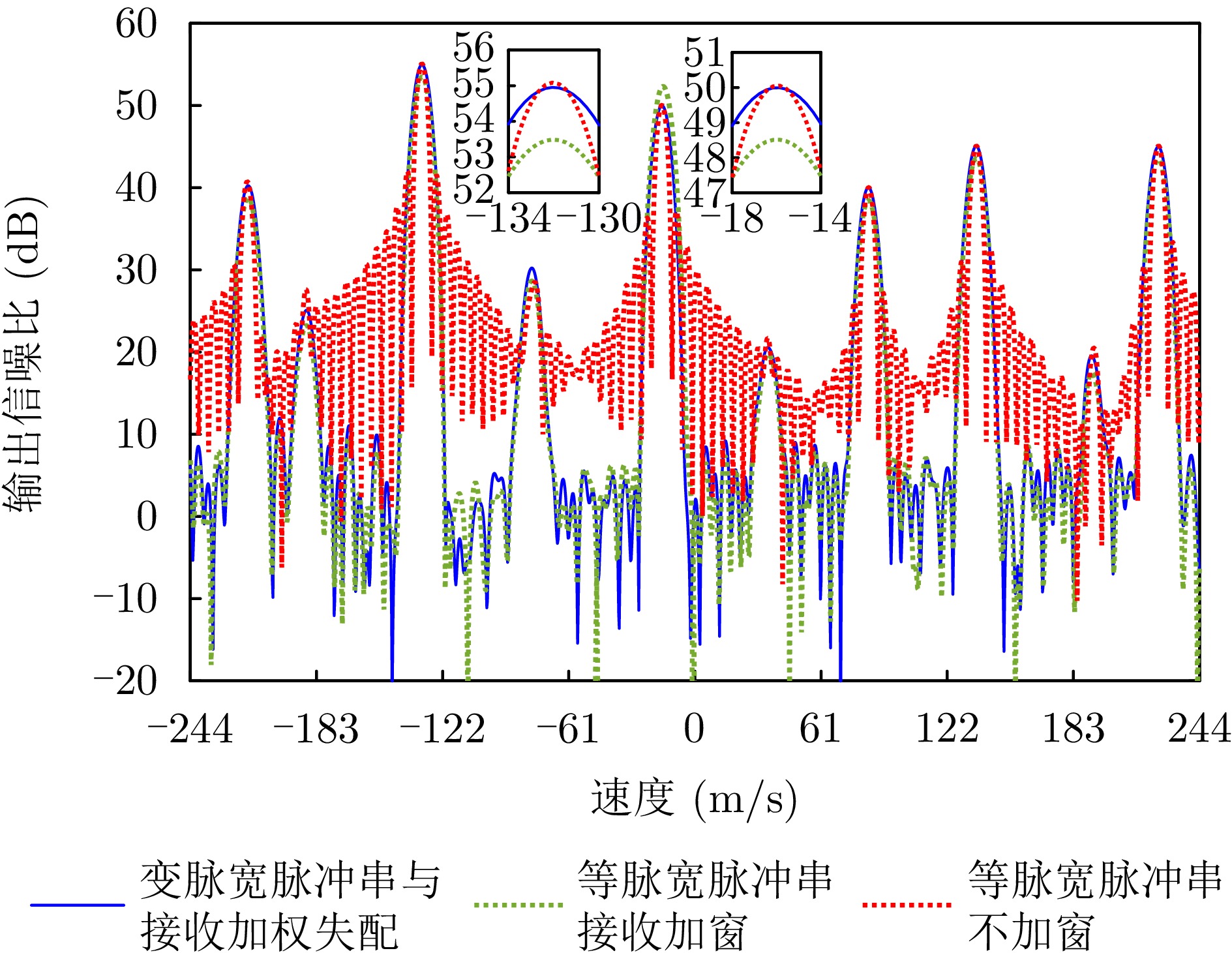
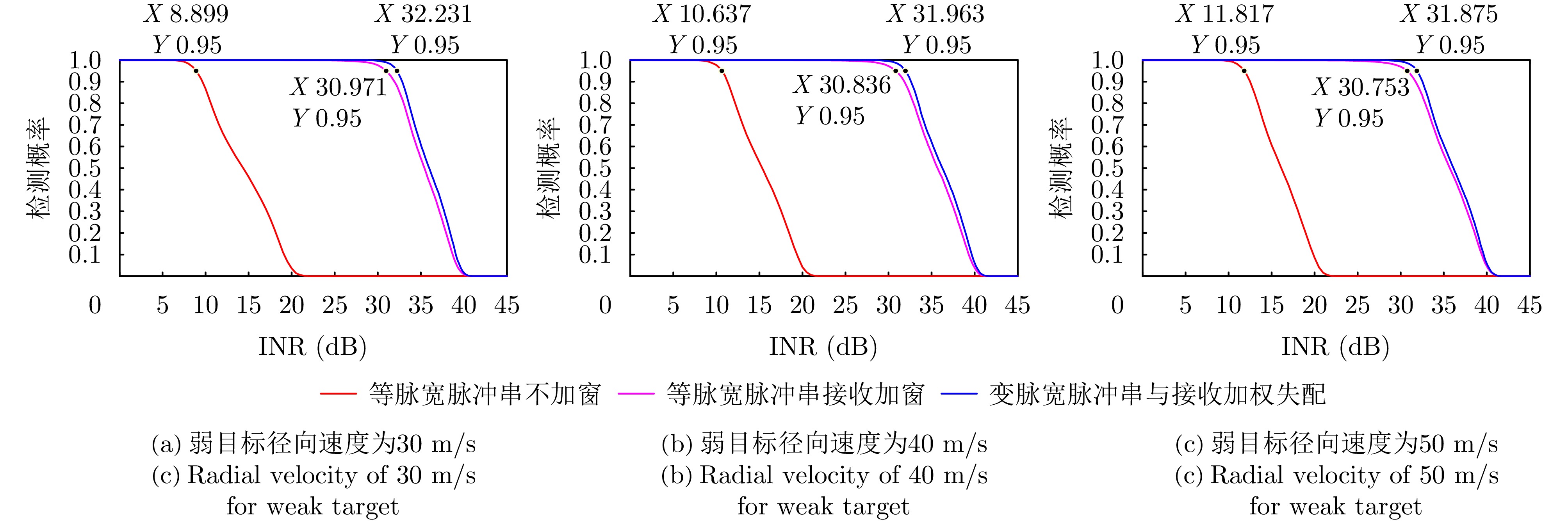
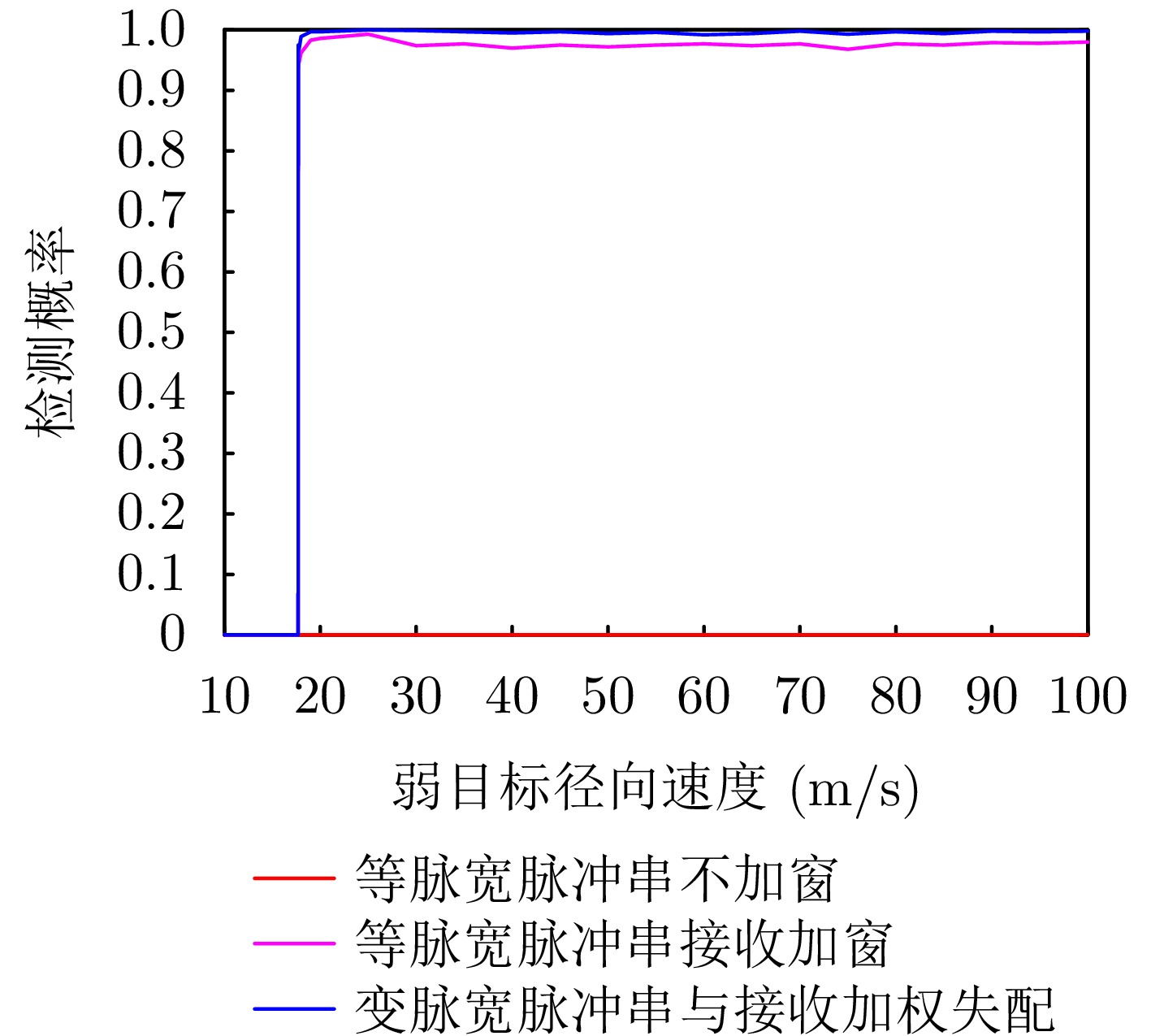
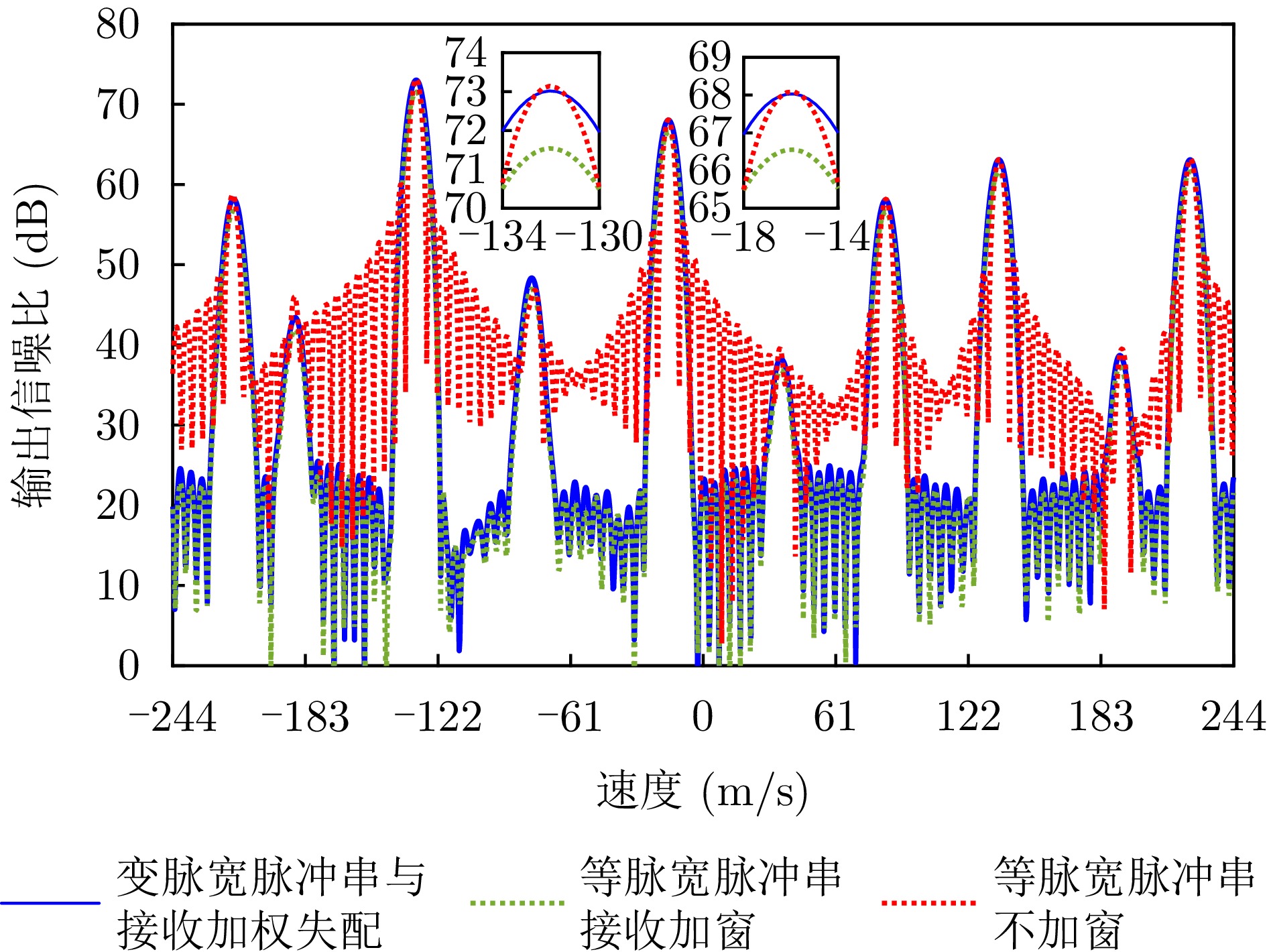
Low-sidelobe waveforms are fundamental for ensuring the basic detection performance of radars. Designing waveforms with low sidelobes in the range dimension, the velocity dimension, or both, remains a major challenge in radar research. To address the issue of sidelobe suppression in the velocity dimension for coherent pulse trains, this paper proposes a joint design method of variable-pulse-width pulse trains and receive mismatched filtering. The proposed method uses a symmetric positive window function to directly construct both the pulse width sequence and the receive weighting sequence. As a result, the characteristics of the window function’s amplitude spectrum, including low sidelobes and the broadening of the 3-dB mainlobe, are transferred into the mismatched filtering output of the coherent pulse train. Theoretical analysis shows that the proposed method incurs a smaller mismatched Signal-to-Noise Ratio (SNR) loss than when the window function is applied solely for receive mismatched filtering. The effects of window functions and the minimum pulse-width constraint on SNR loss and weak target detection performance under strong target interference are analyzed through simulations, illustrating the advantages of the proposed joint transceiver design method.
Low-sidelobe waveforms are fundamental for ensuring the basic detection performance of radars. Designing waveforms with low sidelobes in the range dimension, the velocity dimension, or both, remains a major challenge in radar research. To address the issue of sidelobe suppression in the velocity dimension for coherent pulse trains, this paper proposes a joint design method of variable-pulse-width pulse trains and receive mismatched filtering. The proposed method uses a symmetric positive window function to directly construct both the pulse width sequence and the receive weighting sequence. As a result, the characteristics of the window function’s amplitude spectrum, including low sidelobes and the broadening of the 3-dB mainlobe, are transferred into the mismatched filtering output of the coherent pulse train. Theoretical analysis shows that the proposed method incurs a smaller mismatched Signal-to-Noise Ratio (SNR) loss than when the window function is applied solely for receive mismatched filtering. The effects of window functions and the minimum pulse-width constraint on SNR loss and weak target detection performance under strong target interference are analyzed through simulations, illustrating the advantages of the proposed joint transceiver design method.
2026,
15(2):
662-686.
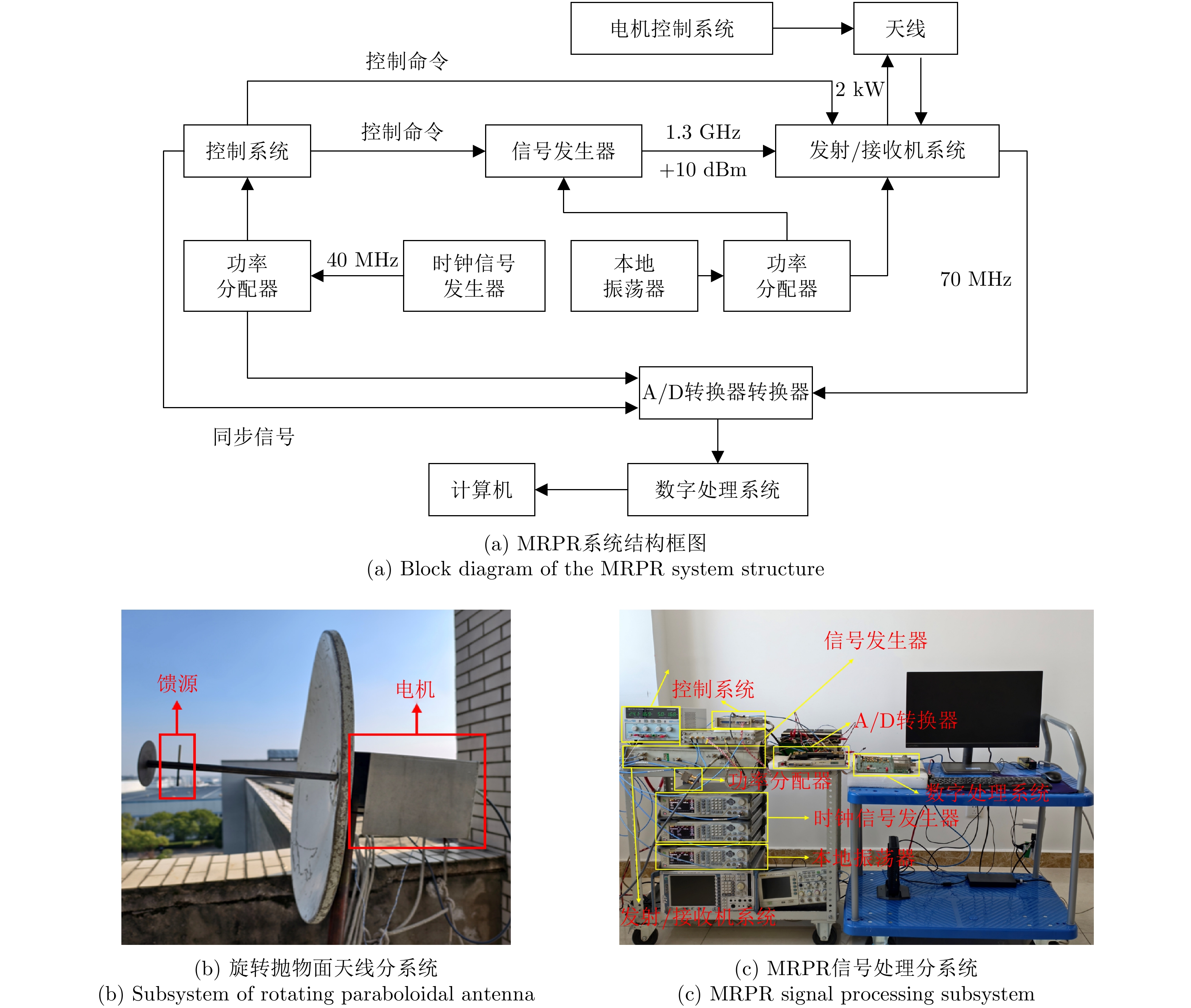
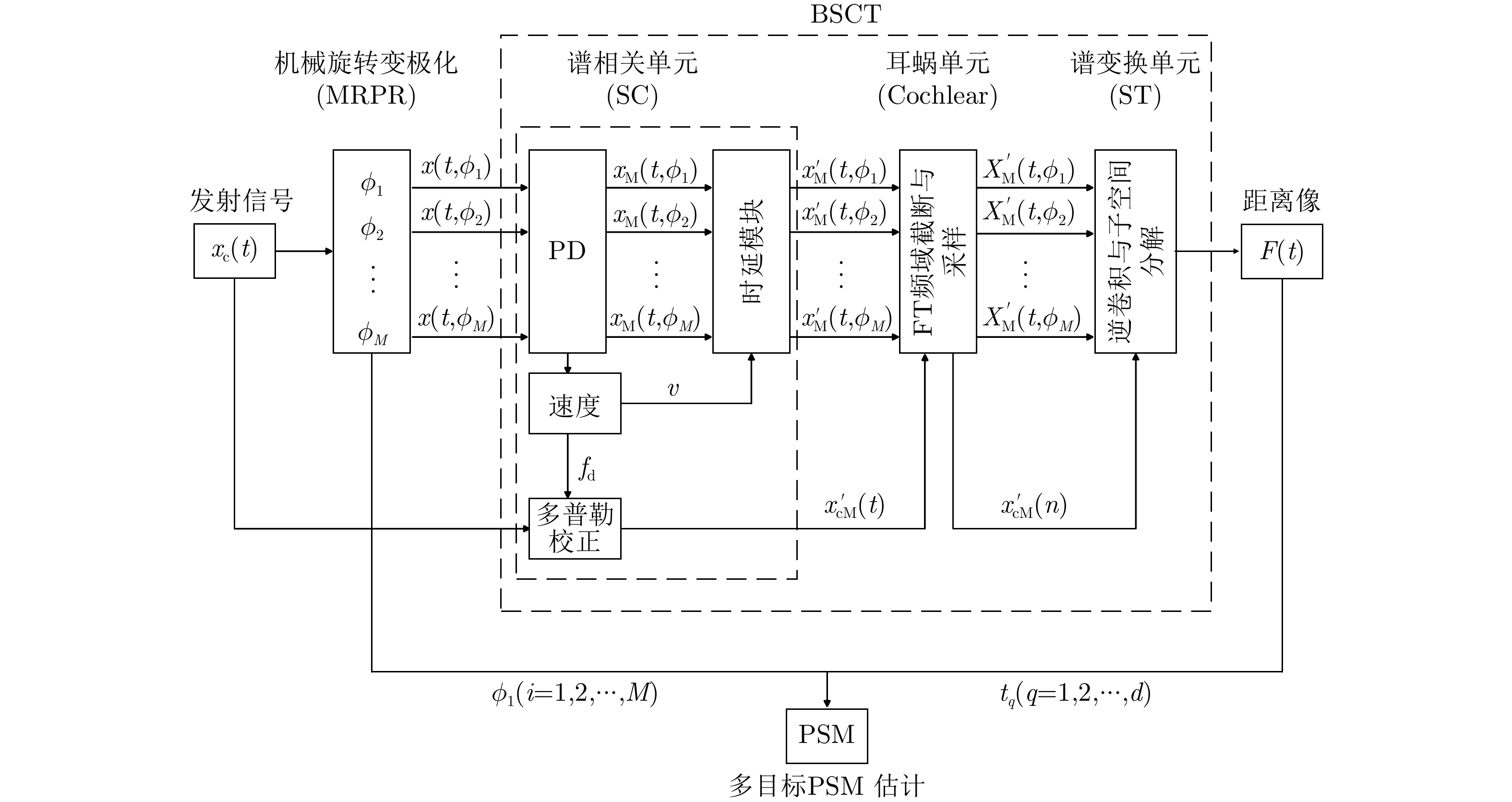
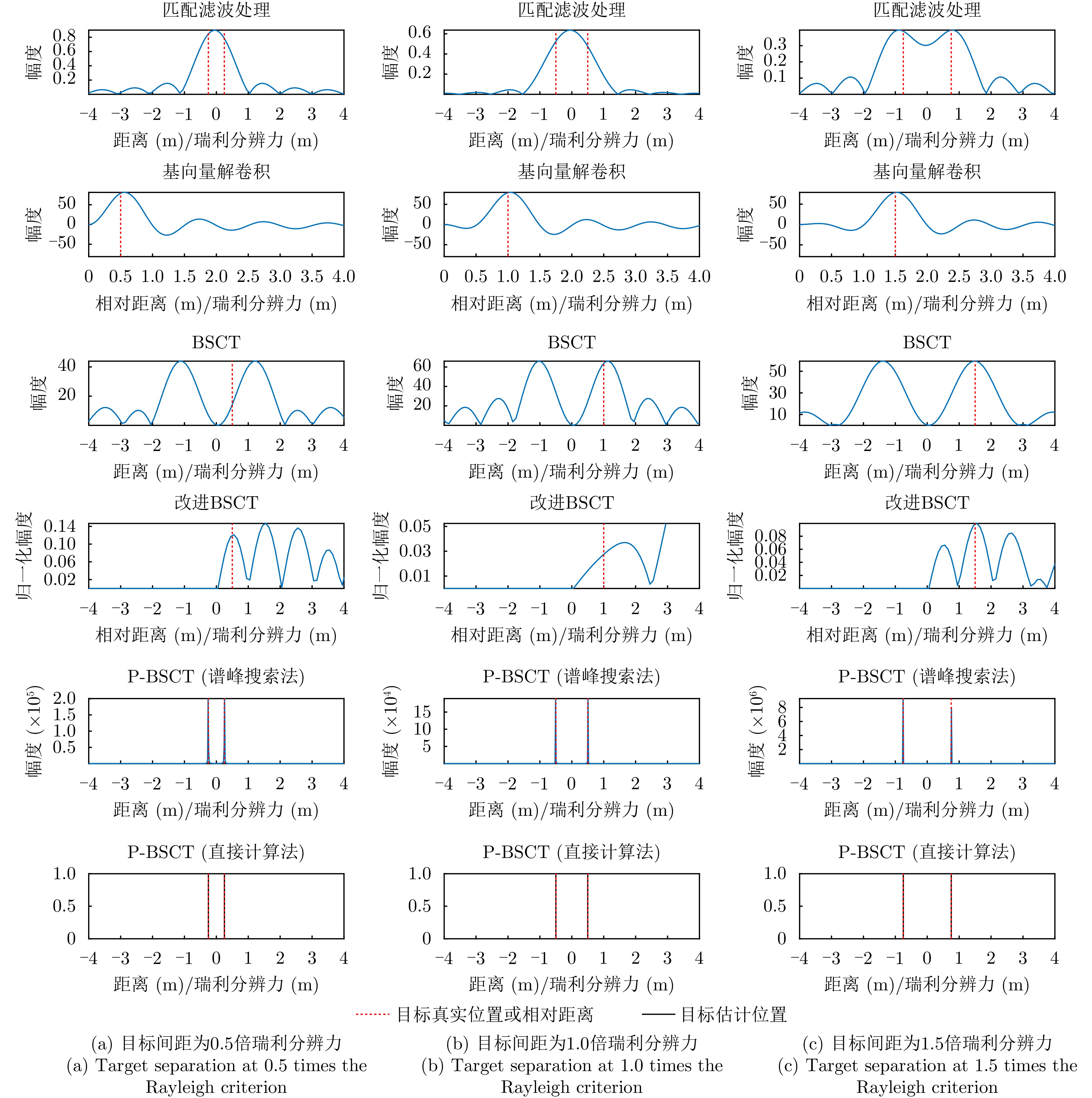
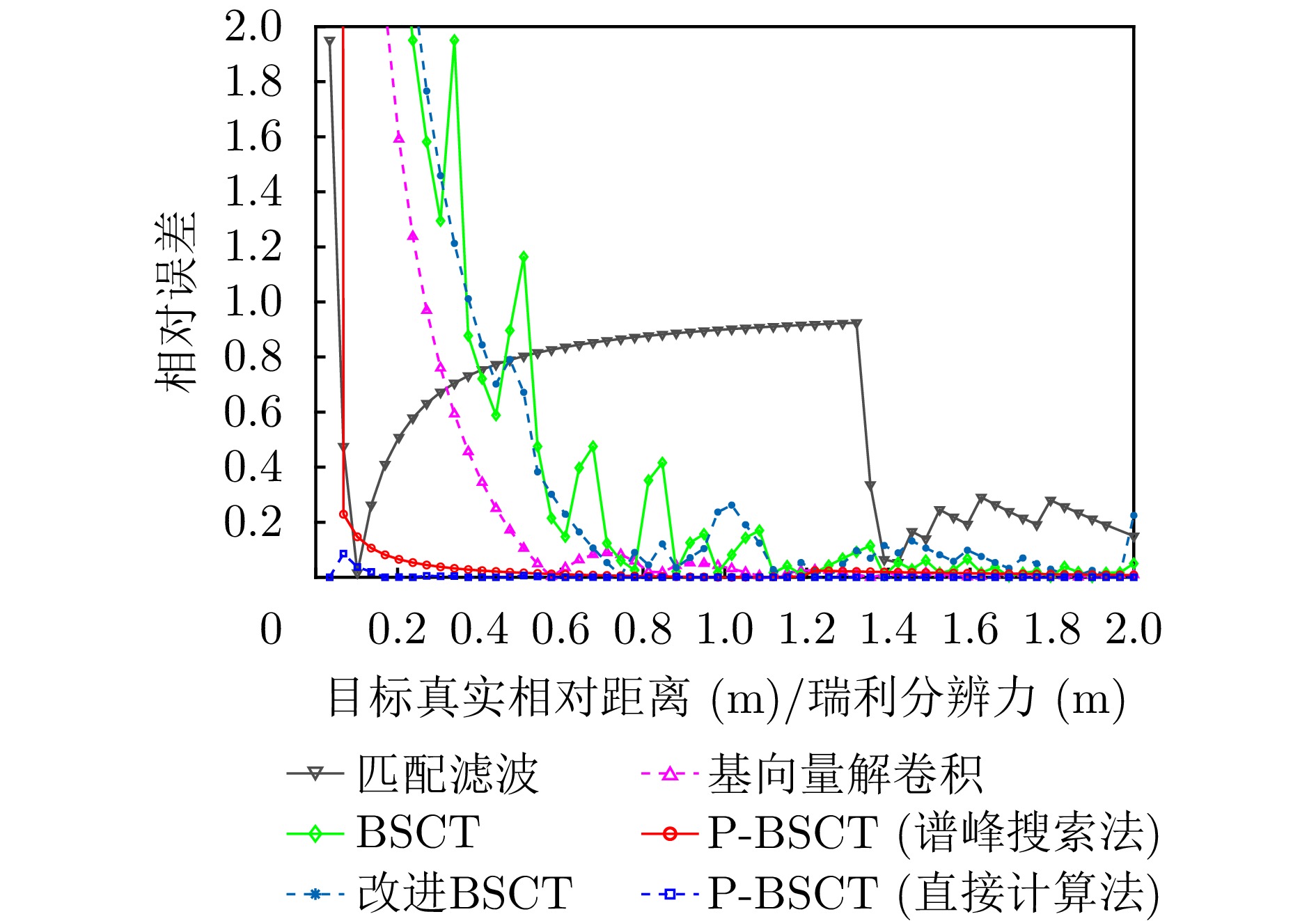
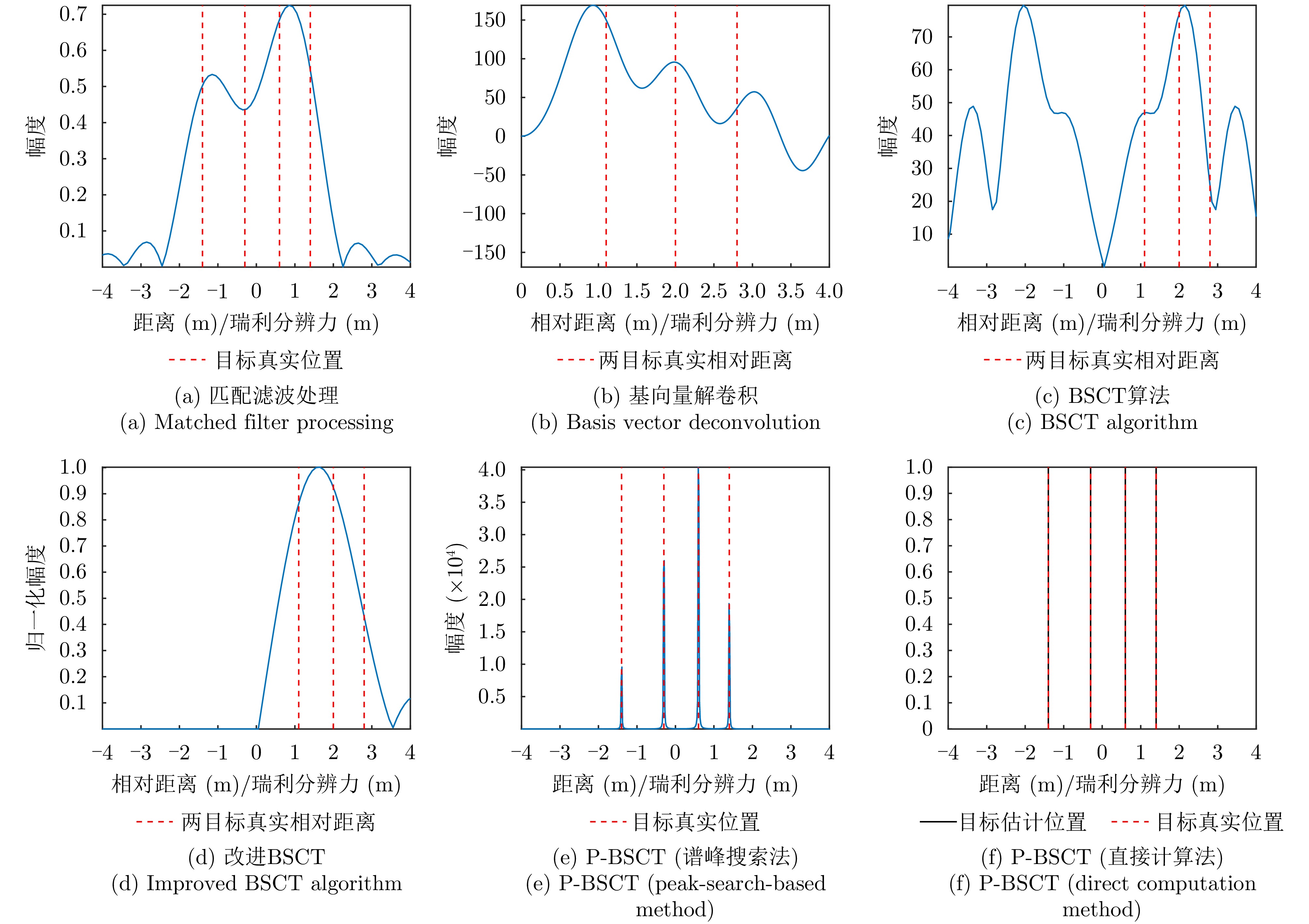
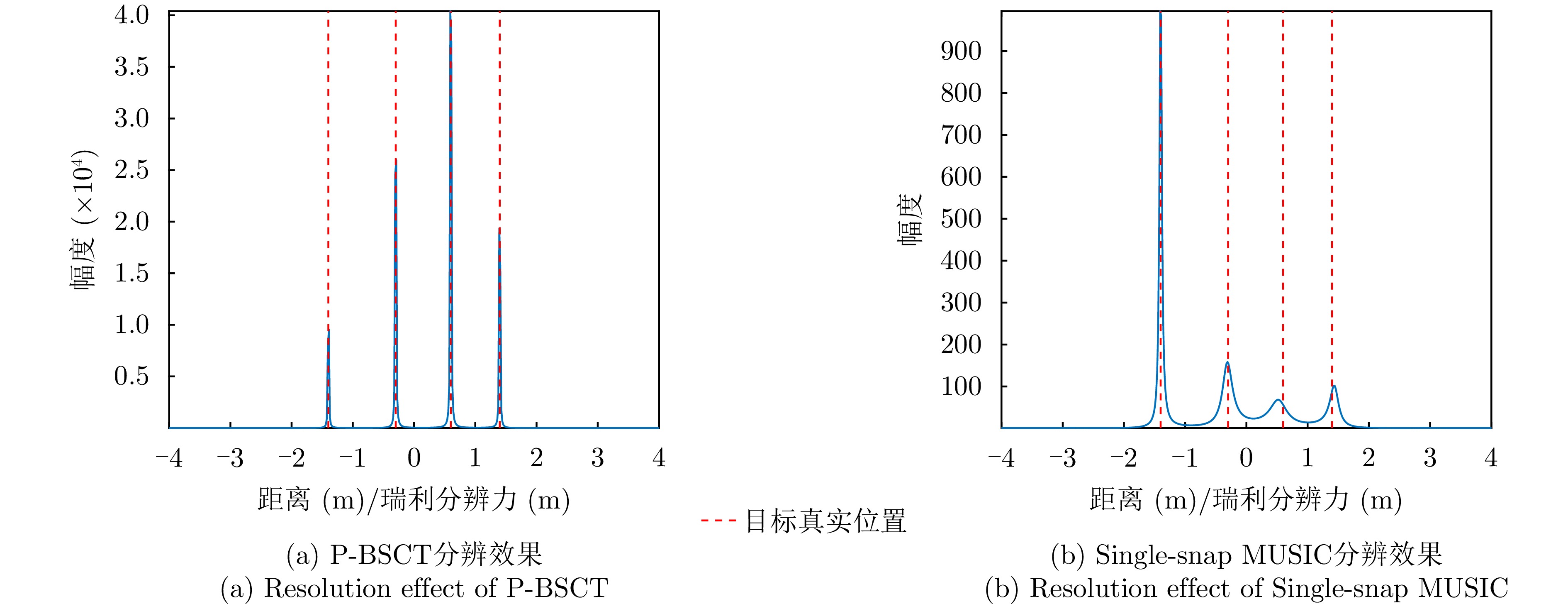
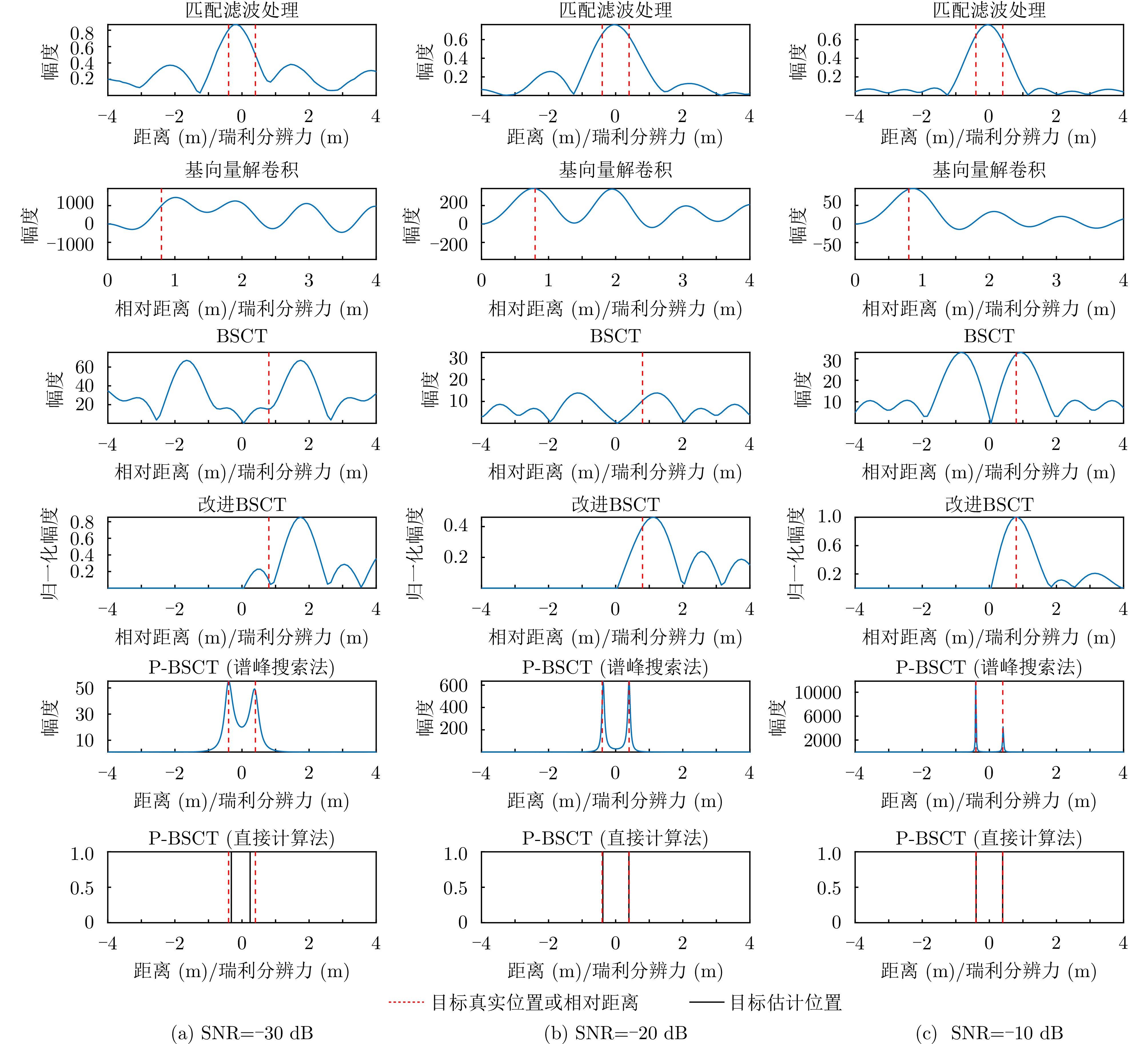
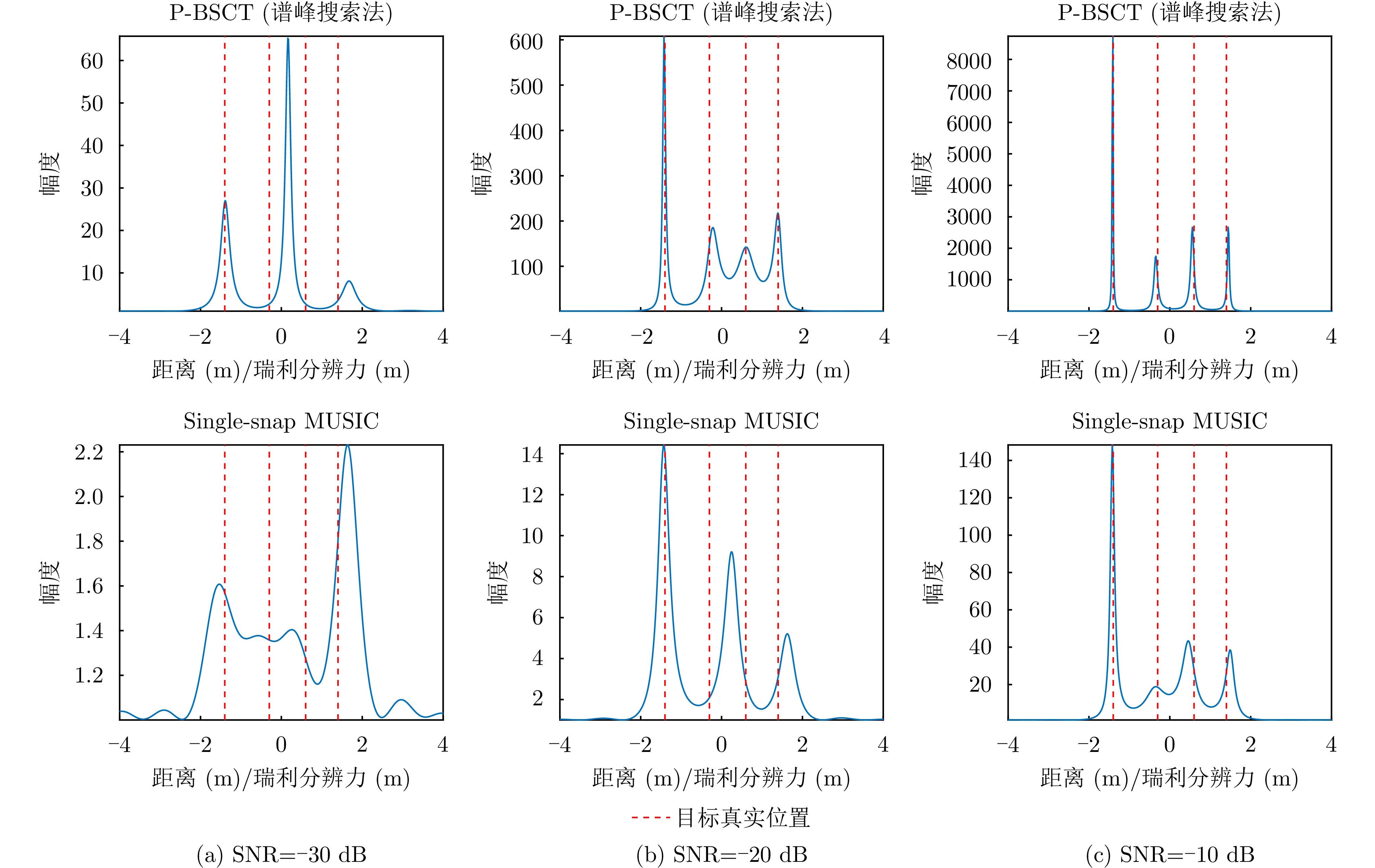
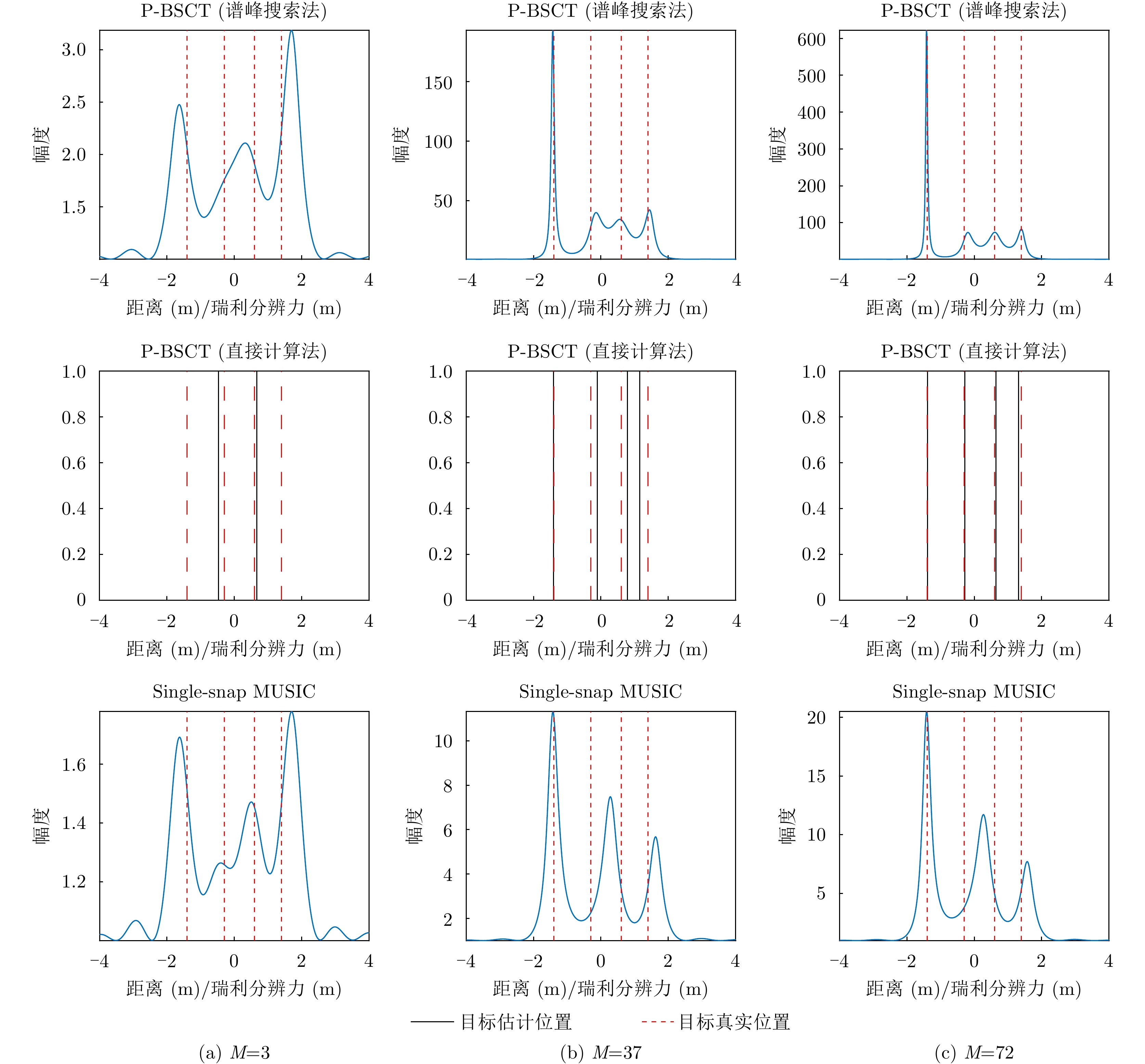
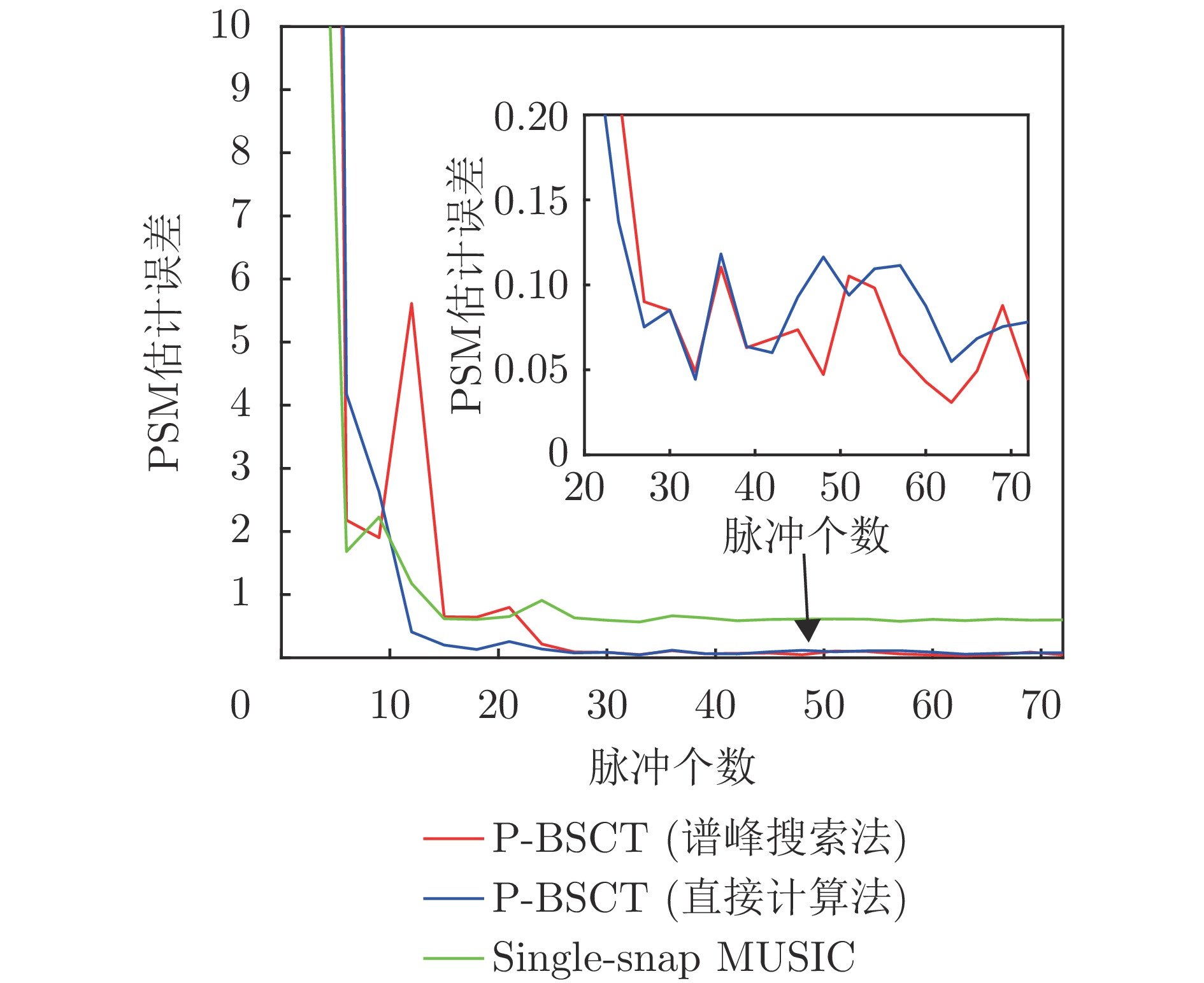
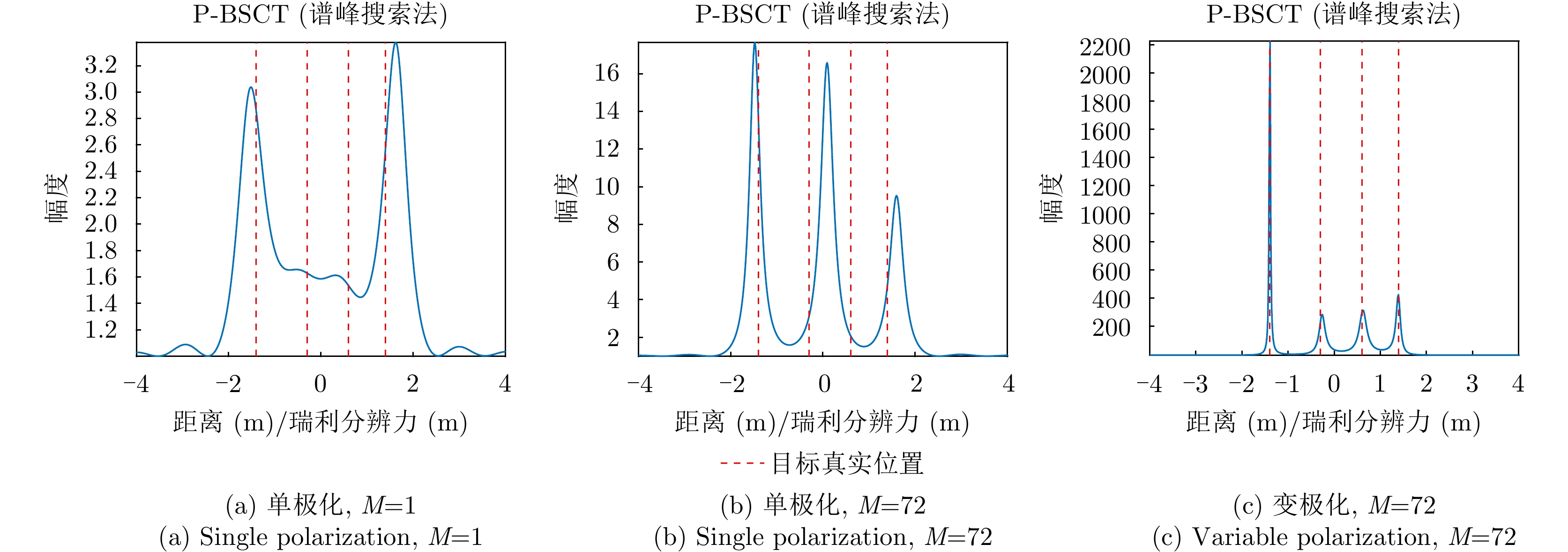
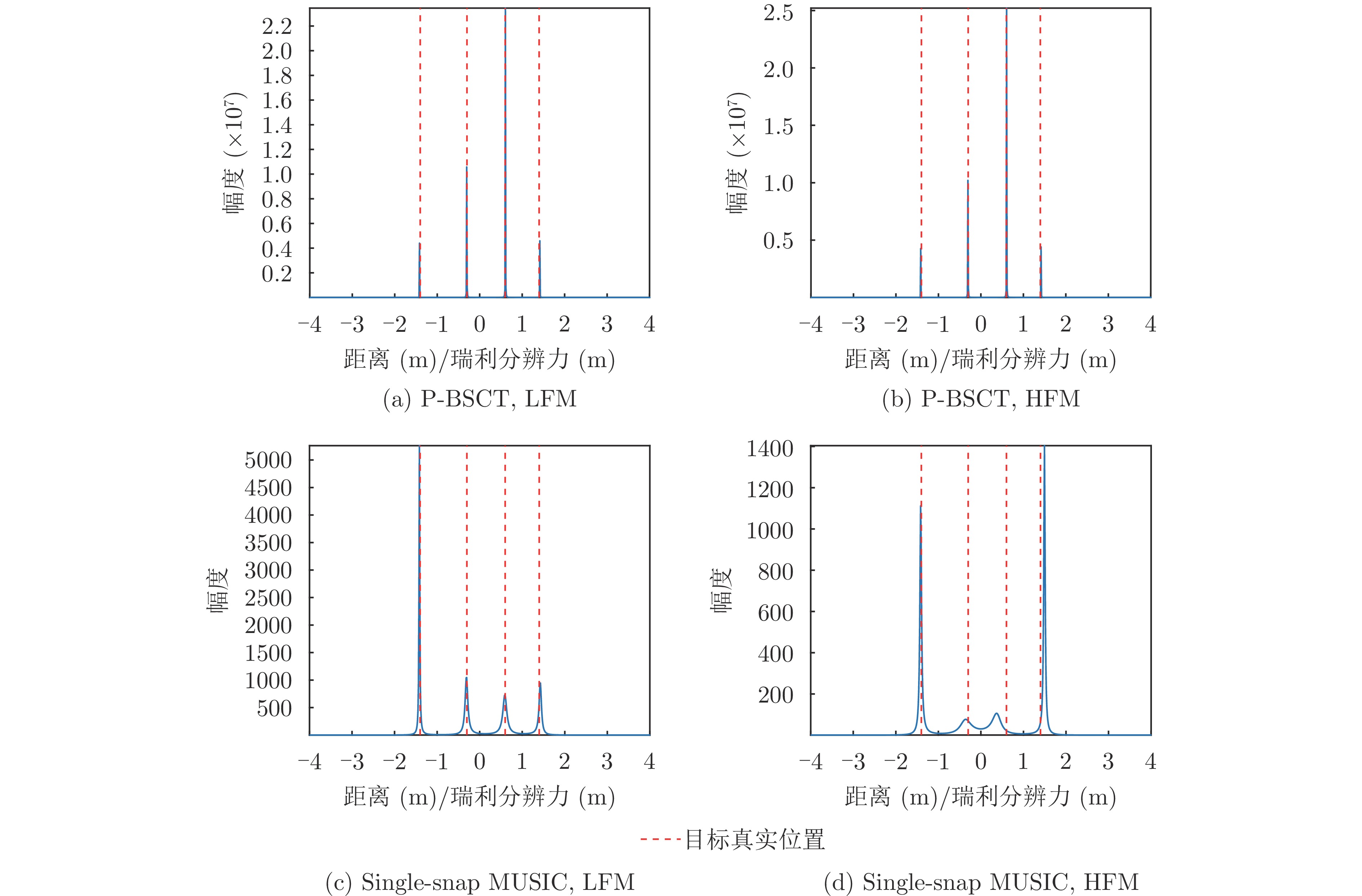
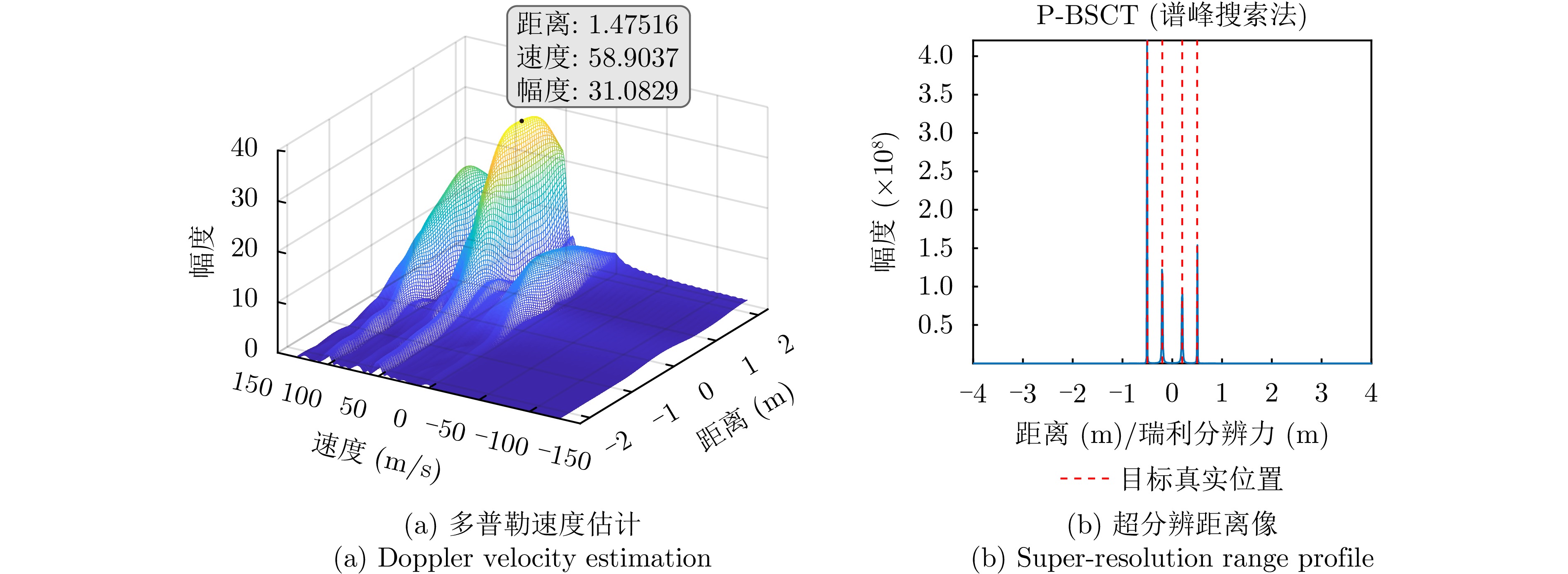
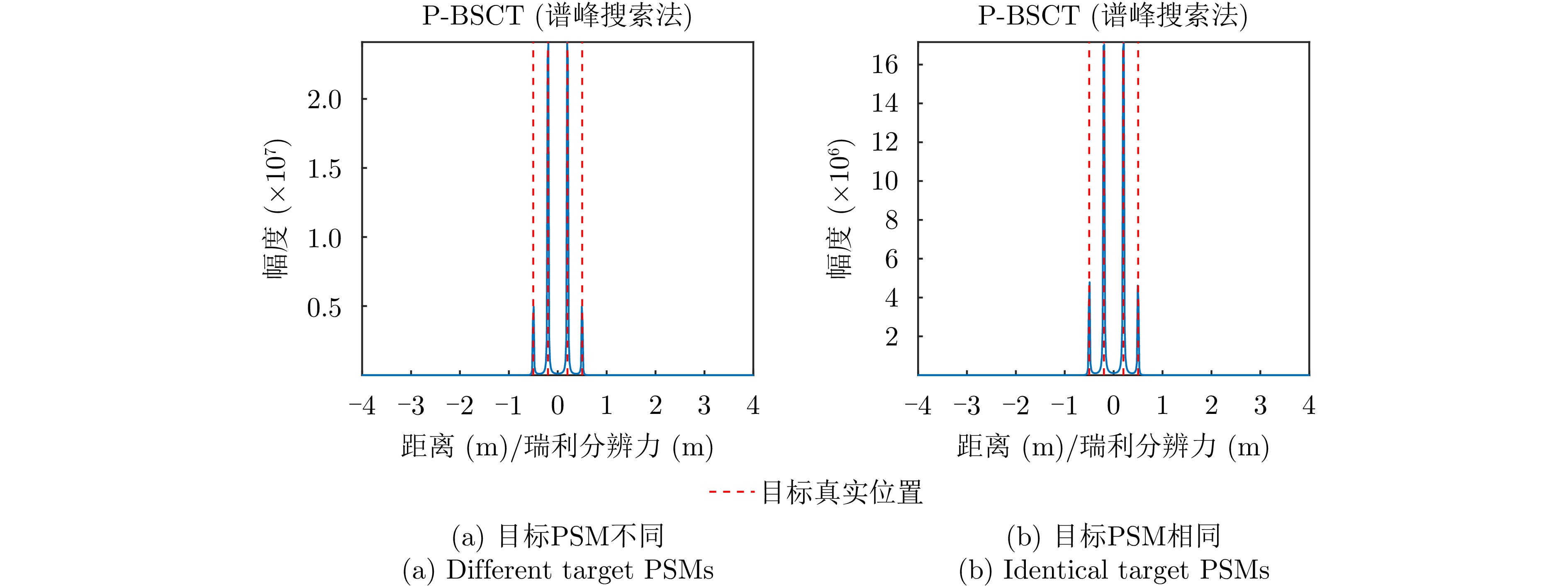
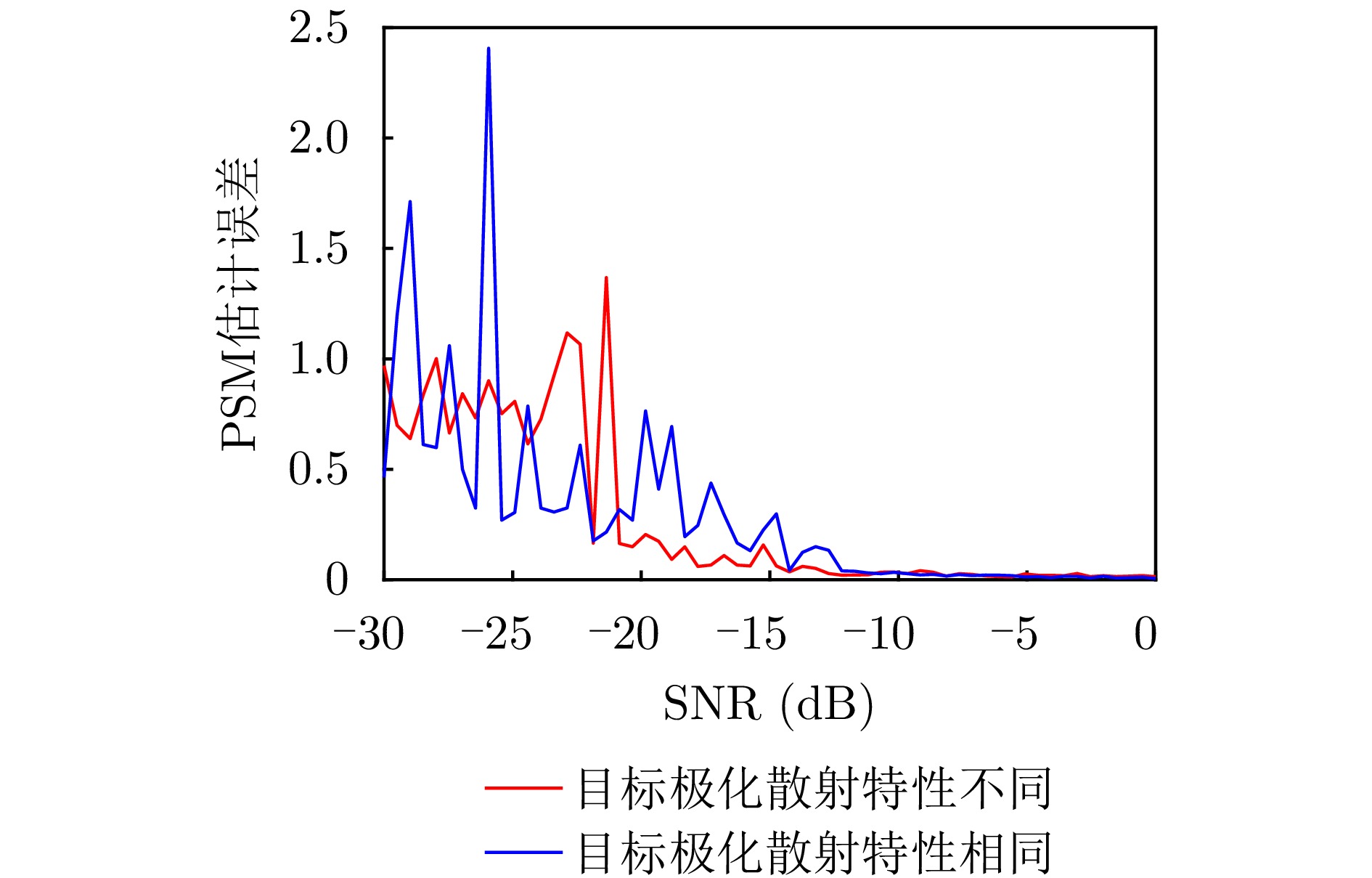
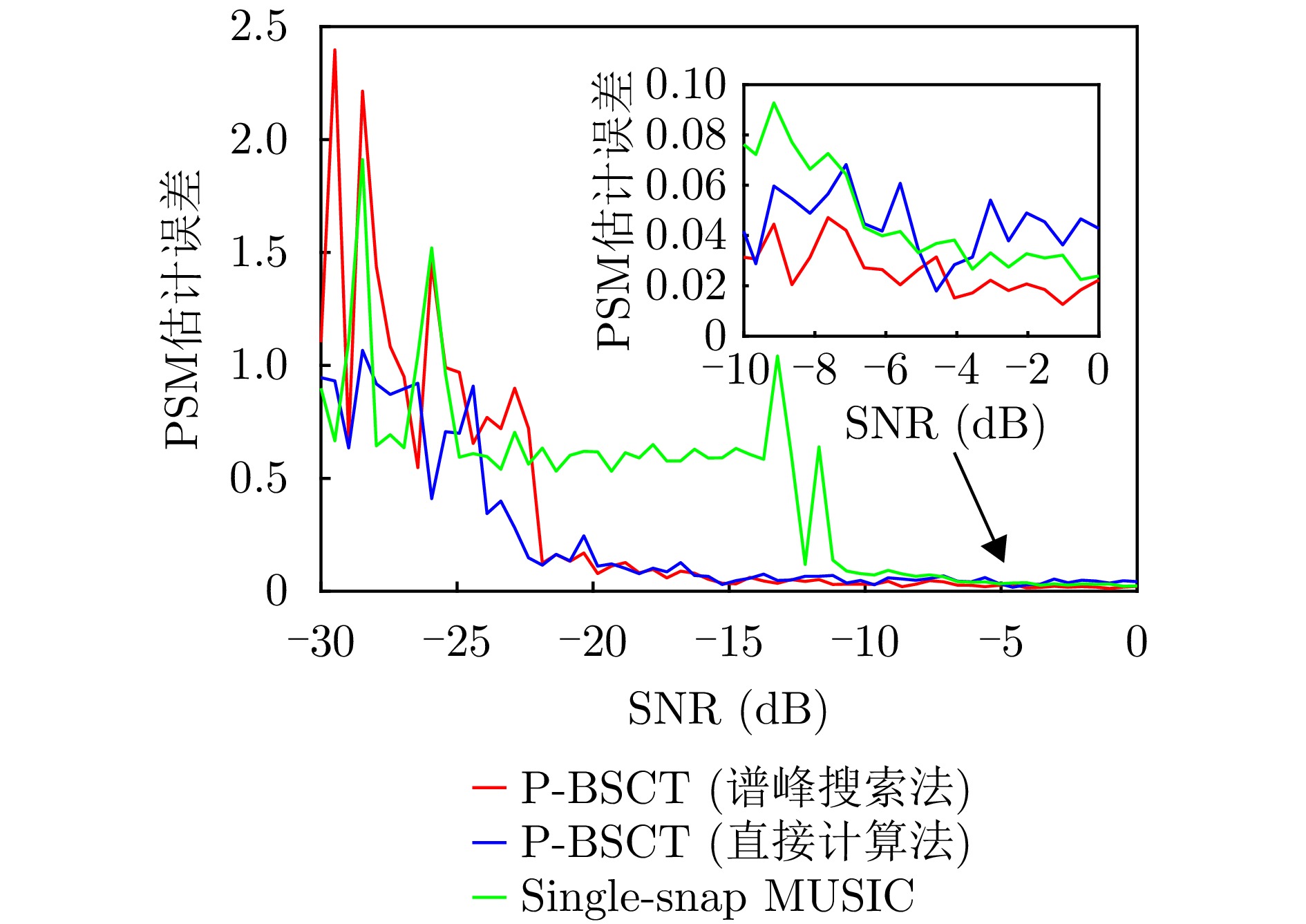
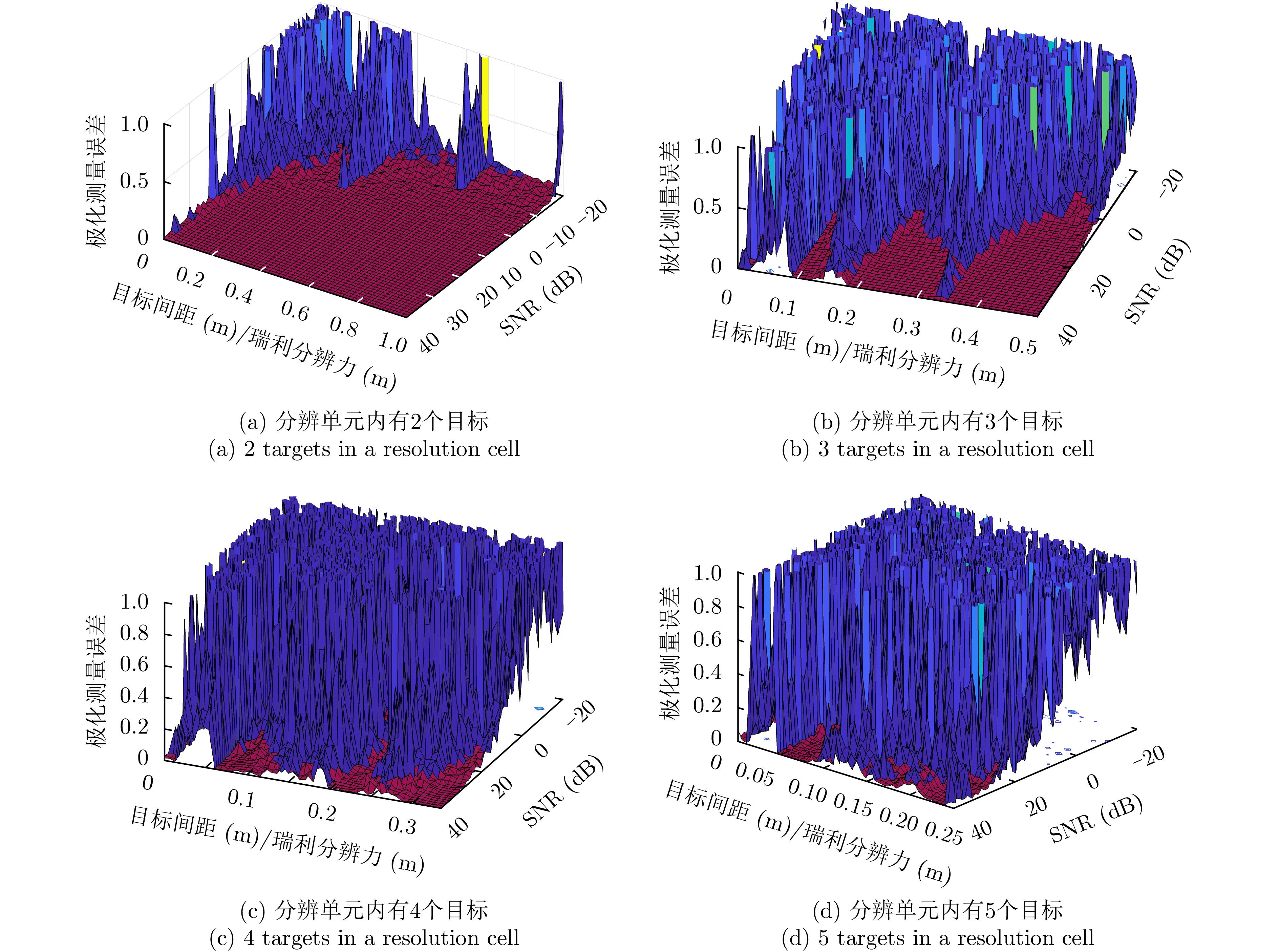
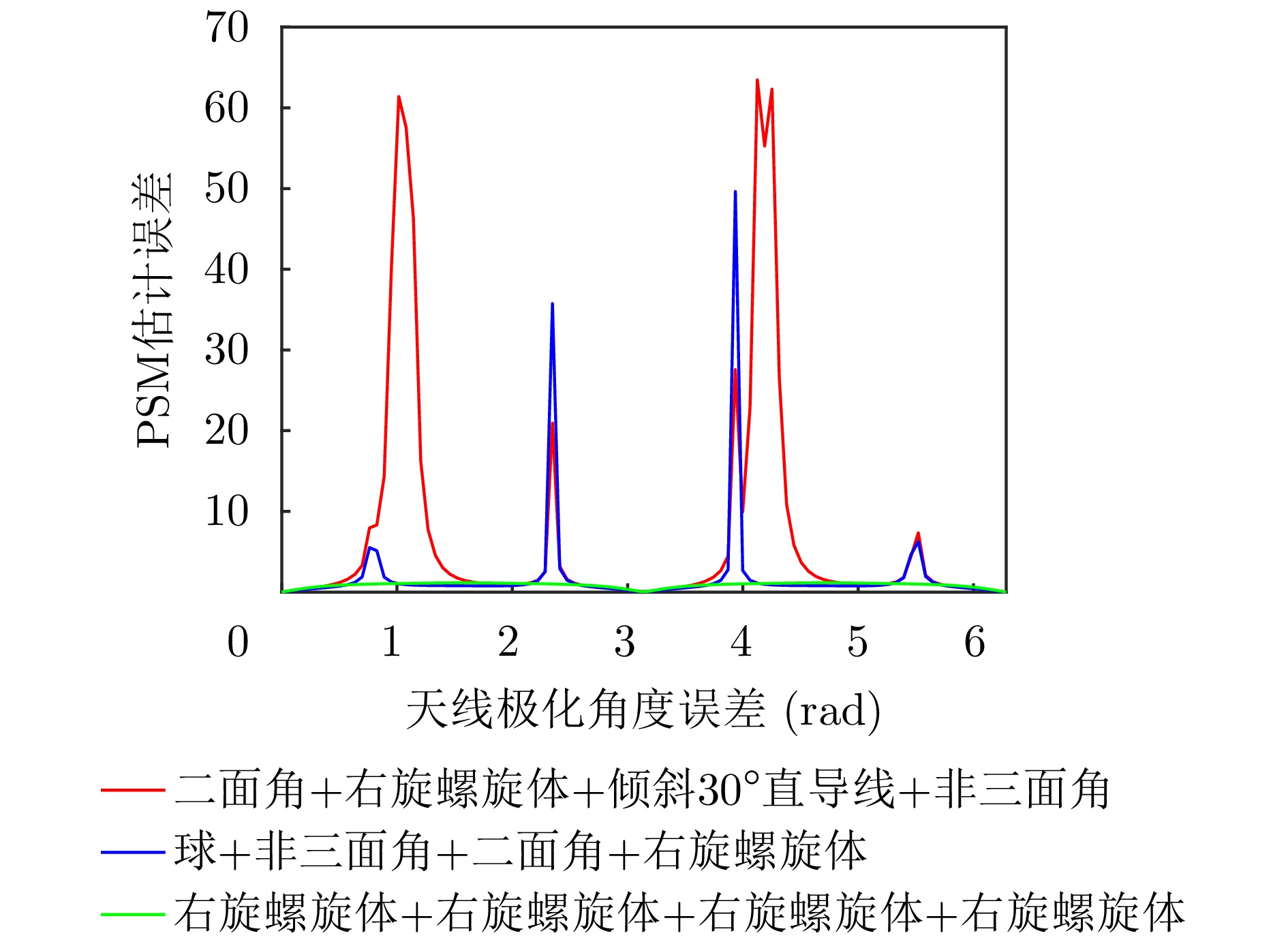
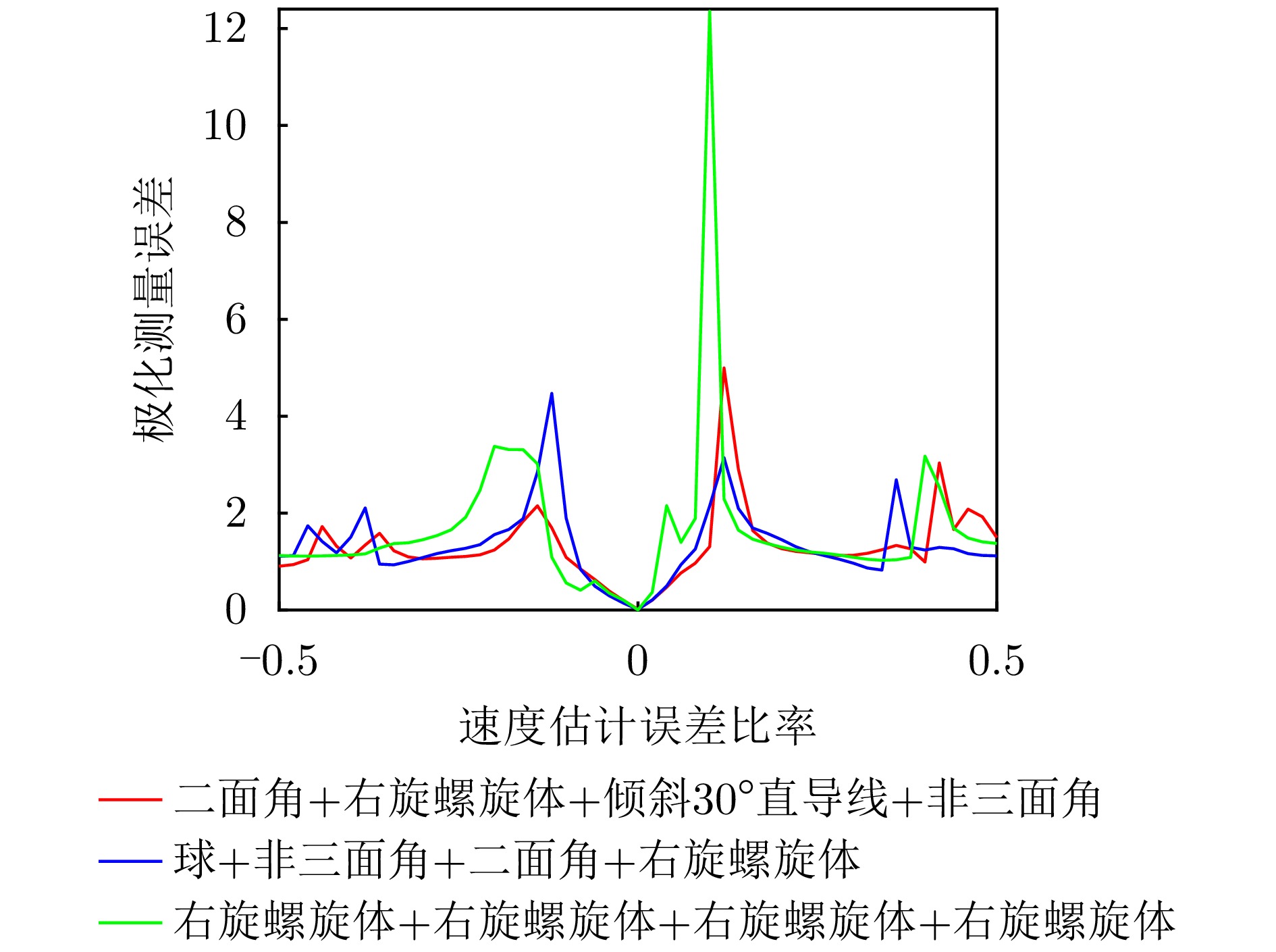
In recent years, bionic super-resolution technology, inspired by biological perception mechanisms, has emerged as a substantial research direction aimed at overcoming the limitations of radar resolution. The Baseband Spectrogram Correlation and Transformation (BSCT) model, which is based on bat hearing, offers a novel approach to enhancing traditional radar resolution. However, the model exhibits inherent limitations, including insufficient multi-target adaptability and the inability to utilize polarization information. To address these problems, this paper proposes a polarization-enhanced bionic super-resolution model: Polarimetric Baseband Spectrogram Correlation and Transformation (P-BSCT) for Mechanical Rotation Polarimetric Radar (MRPR). The primary contributions of this study are as follows: first, the integration of the bat BSCT model with MRPR, thereby enabling the utilization of polarization information and the execution of polarization measurements; second, the proposal of an advanced signal processing method, which overcomes the limitations of the original BSCT in two-target and static scenes, effectively applying to multi-target and moving-target scenarios, and exhibiting no impact on the resolution effect due to signal modulation. P-BSCT has been demonstrated to enhance resolving power by approximately 15 dB under optimal conditions when compared with the original BSCT model. In scenarios involving moving targets, targets exhibiting equivalent polarization scattering properties, and nonlinear FM signals, the resolving performance of P-BSCT remains essentially unchanged, demonstrating notable robustness.
In recent years, bionic super-resolution technology, inspired by biological perception mechanisms, has emerged as a substantial research direction aimed at overcoming the limitations of radar resolution. The Baseband Spectrogram Correlation and Transformation (BSCT) model, which is based on bat hearing, offers a novel approach to enhancing traditional radar resolution. However, the model exhibits inherent limitations, including insufficient multi-target adaptability and the inability to utilize polarization information. To address these problems, this paper proposes a polarization-enhanced bionic super-resolution model: Polarimetric Baseband Spectrogram Correlation and Transformation (P-BSCT) for Mechanical Rotation Polarimetric Radar (MRPR). The primary contributions of this study are as follows: first, the integration of the bat BSCT model with MRPR, thereby enabling the utilization of polarization information and the execution of polarization measurements; second, the proposal of an advanced signal processing method, which overcomes the limitations of the original BSCT in two-target and static scenes, effectively applying to multi-target and moving-target scenarios, and exhibiting no impact on the resolution effect due to signal modulation. P-BSCT has been demonstrated to enhance resolving power by approximately 15 dB under optimal conditions when compared with the original BSCT model. In scenarios involving moving targets, targets exhibiting equivalent polarization scattering properties, and nonlinear FM signals, the resolving performance of P-BSCT remains essentially unchanged, demonstrating notable robustness.
2026,
15(2):
687-709.
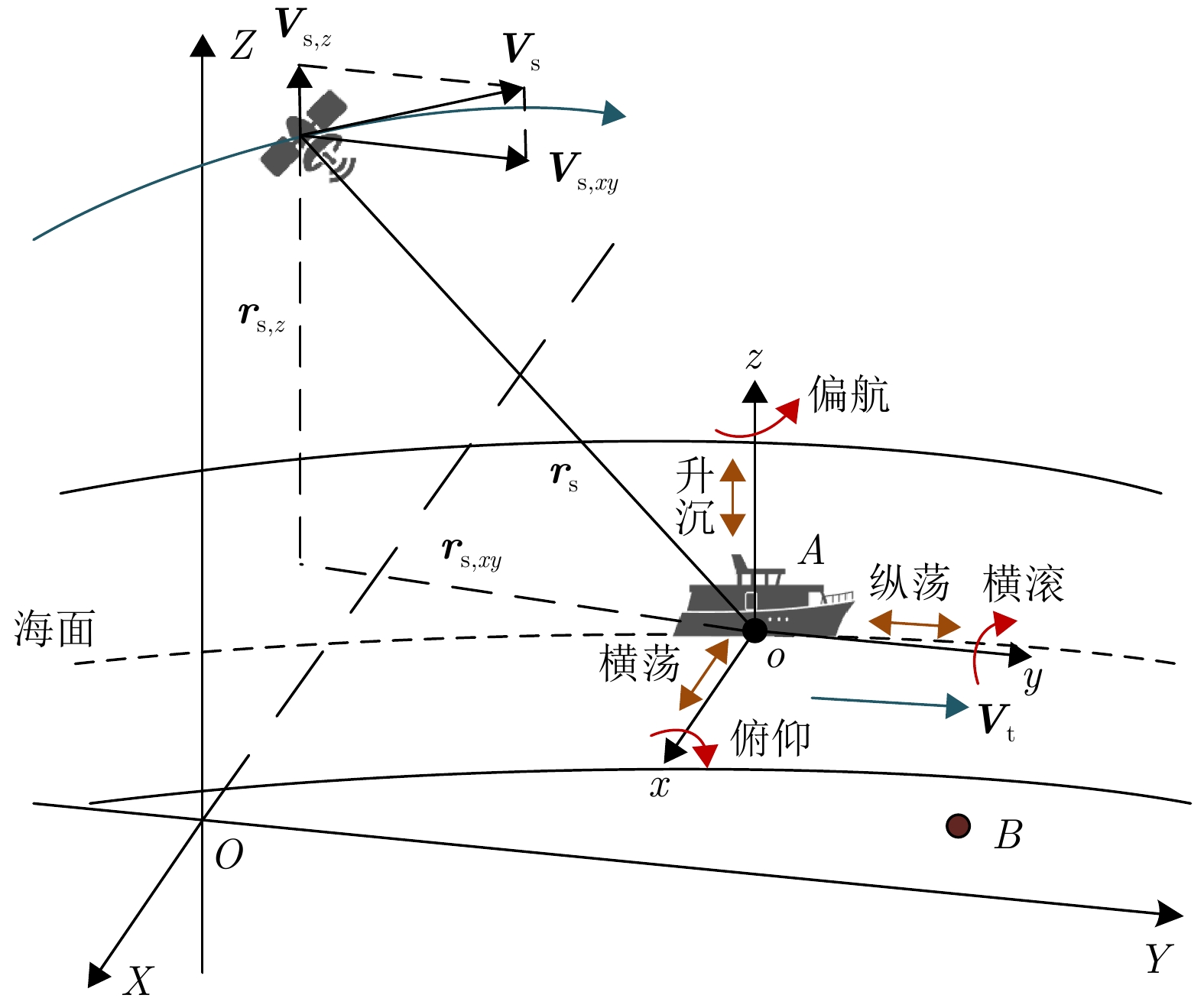
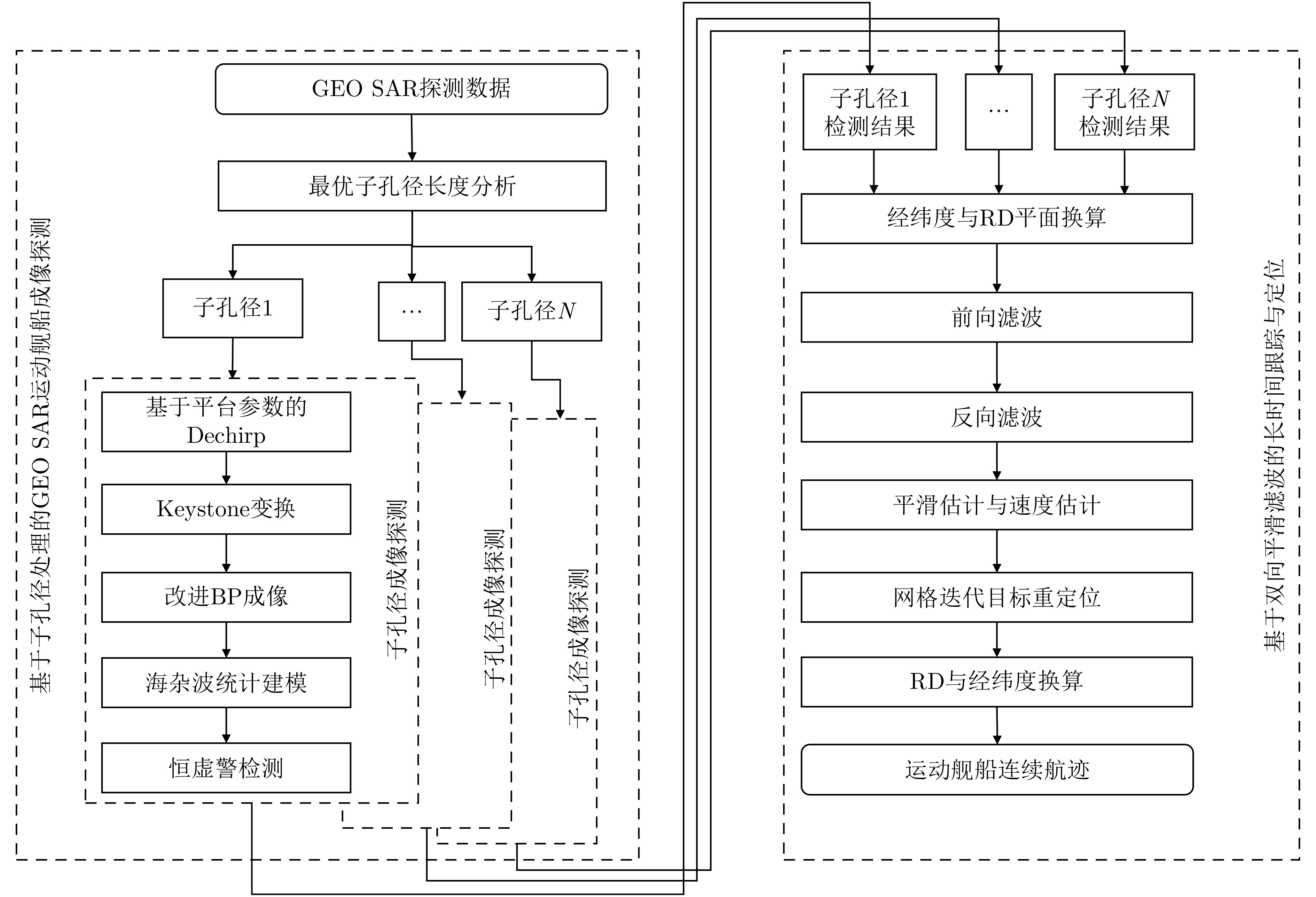
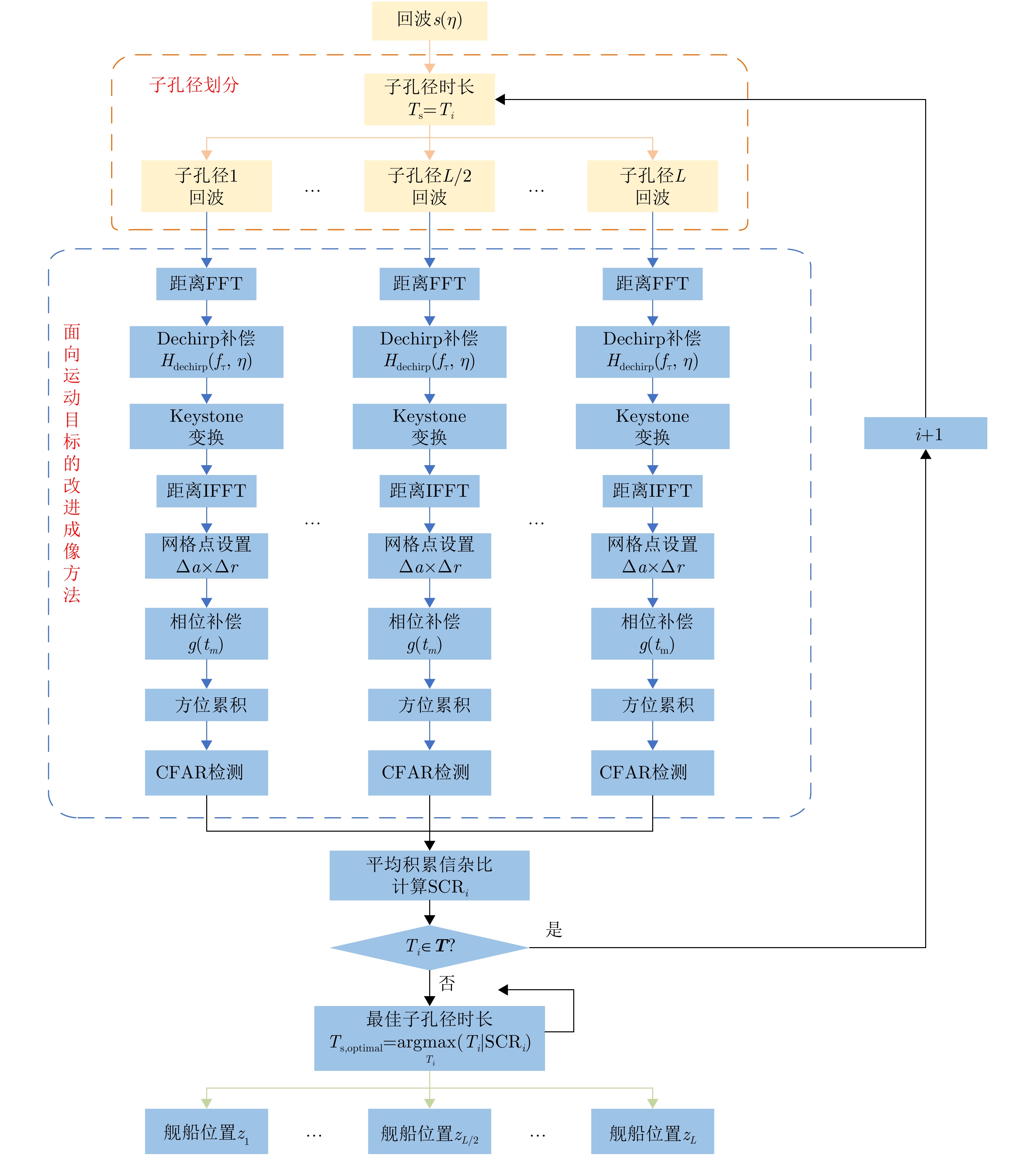
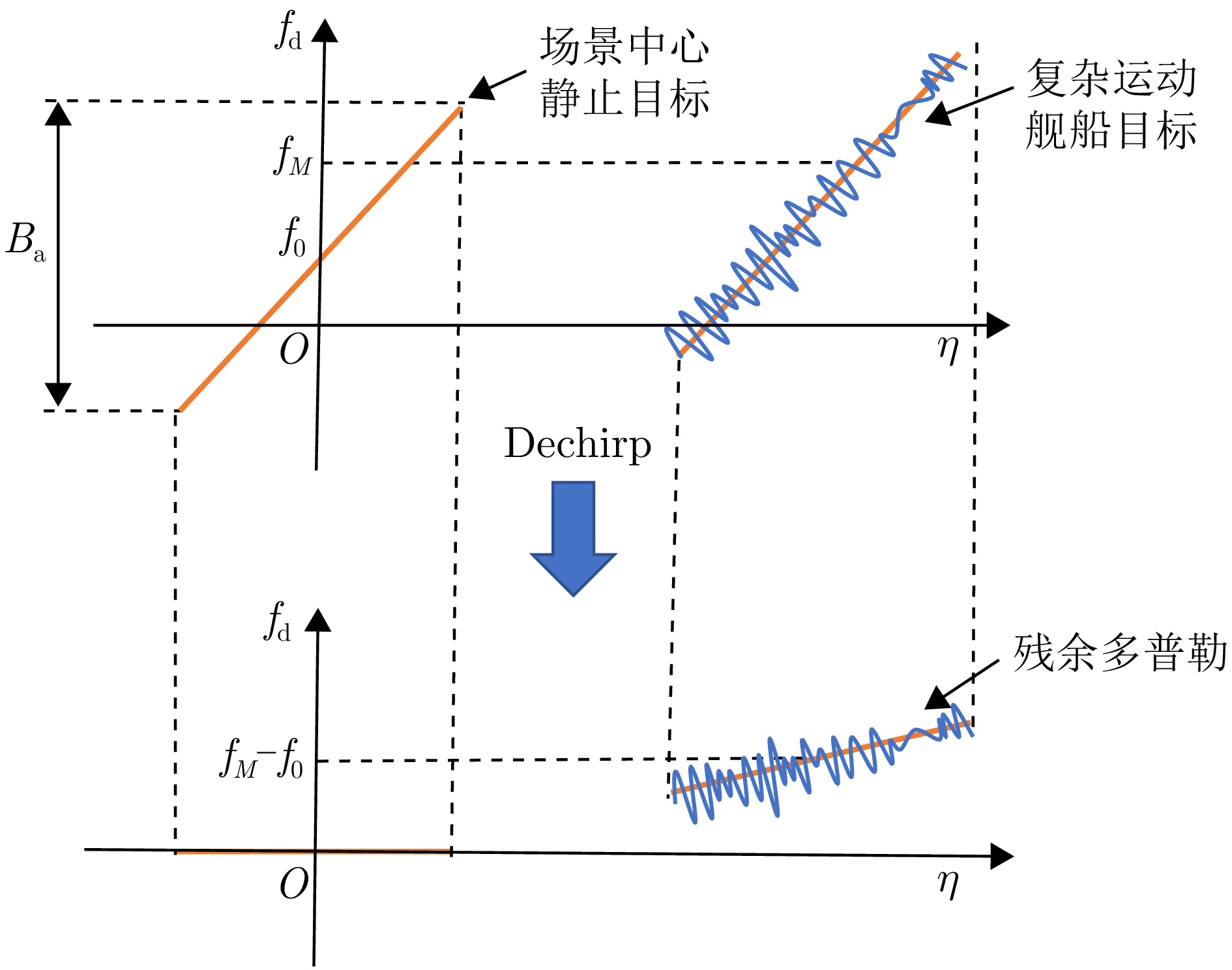
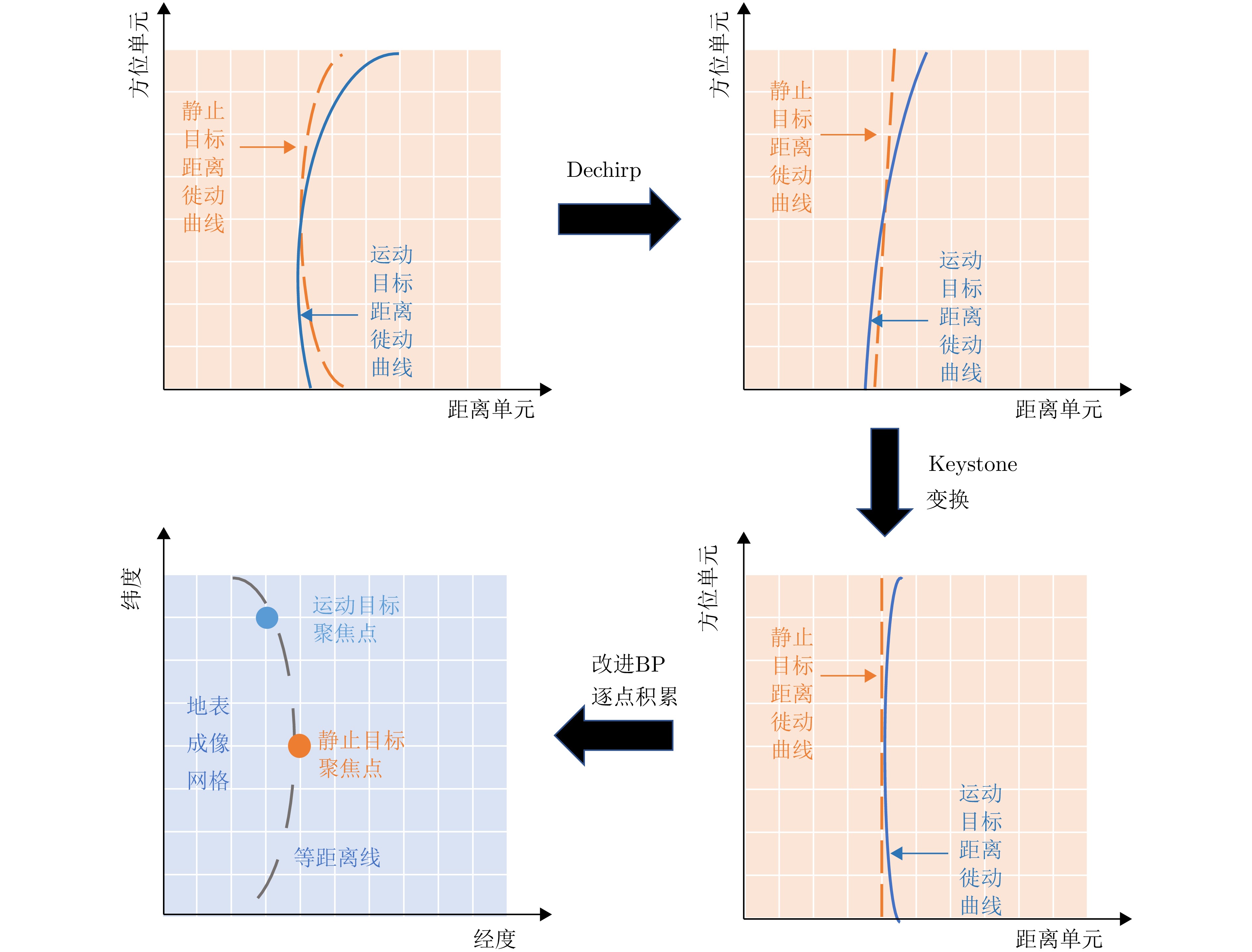
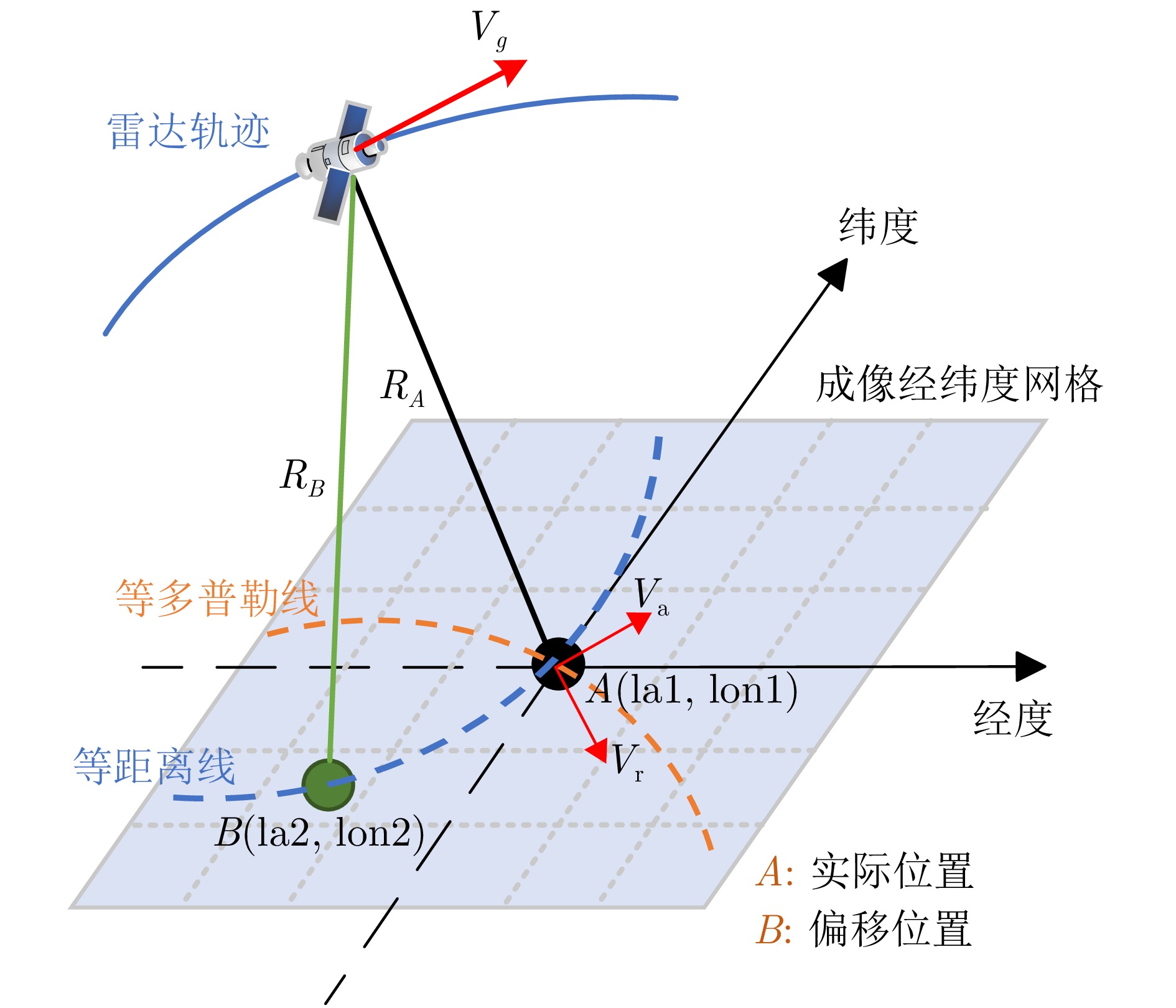
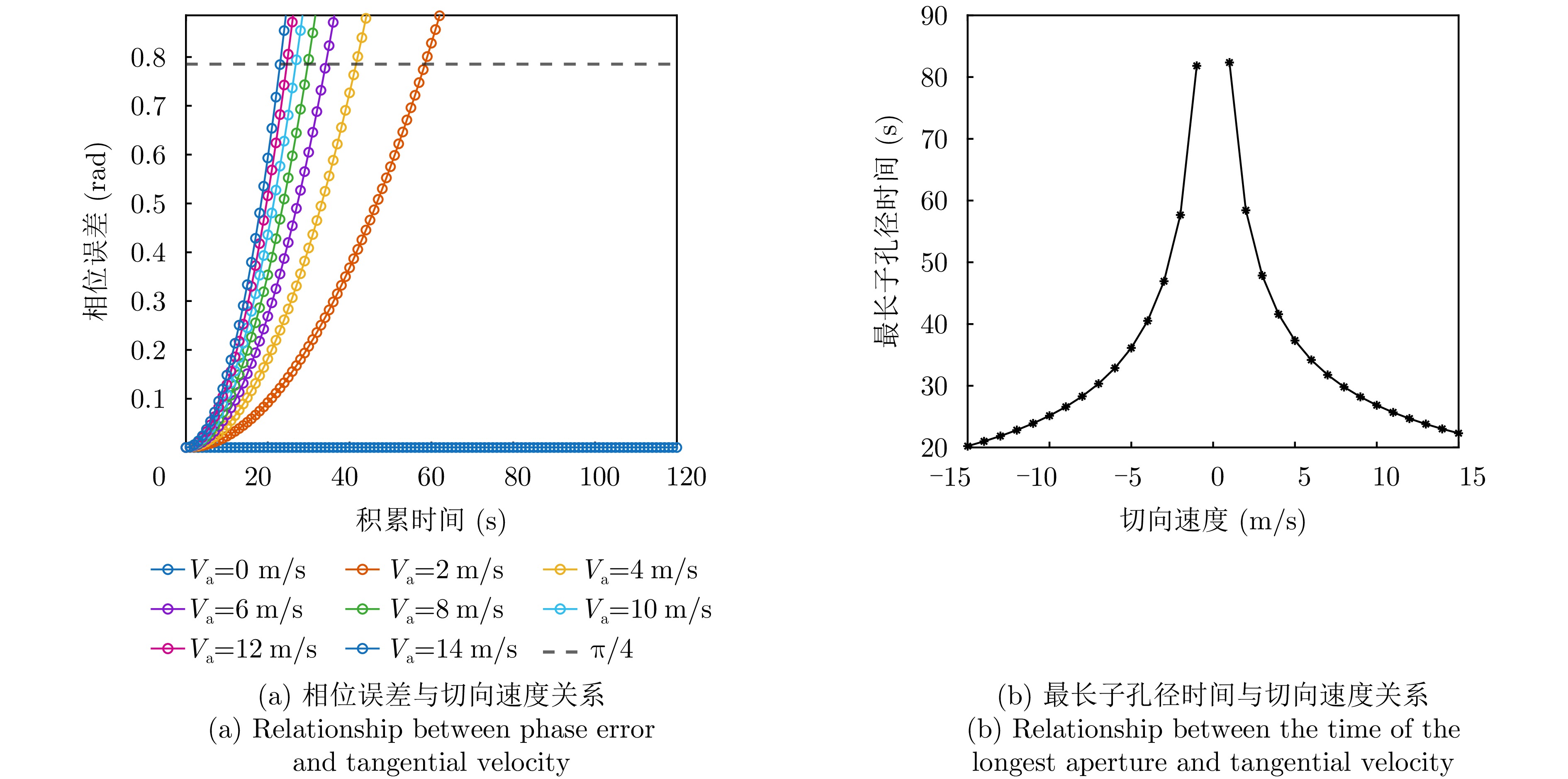
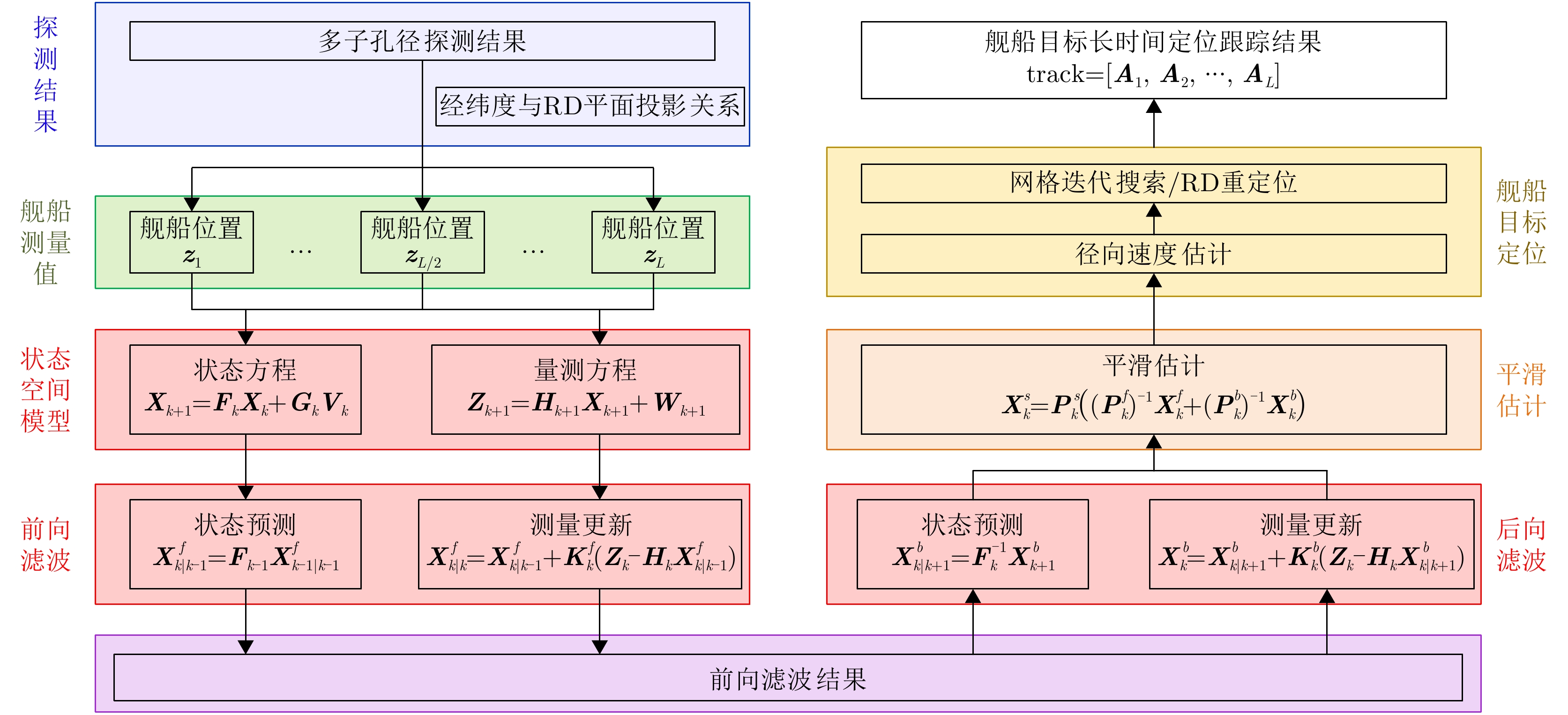
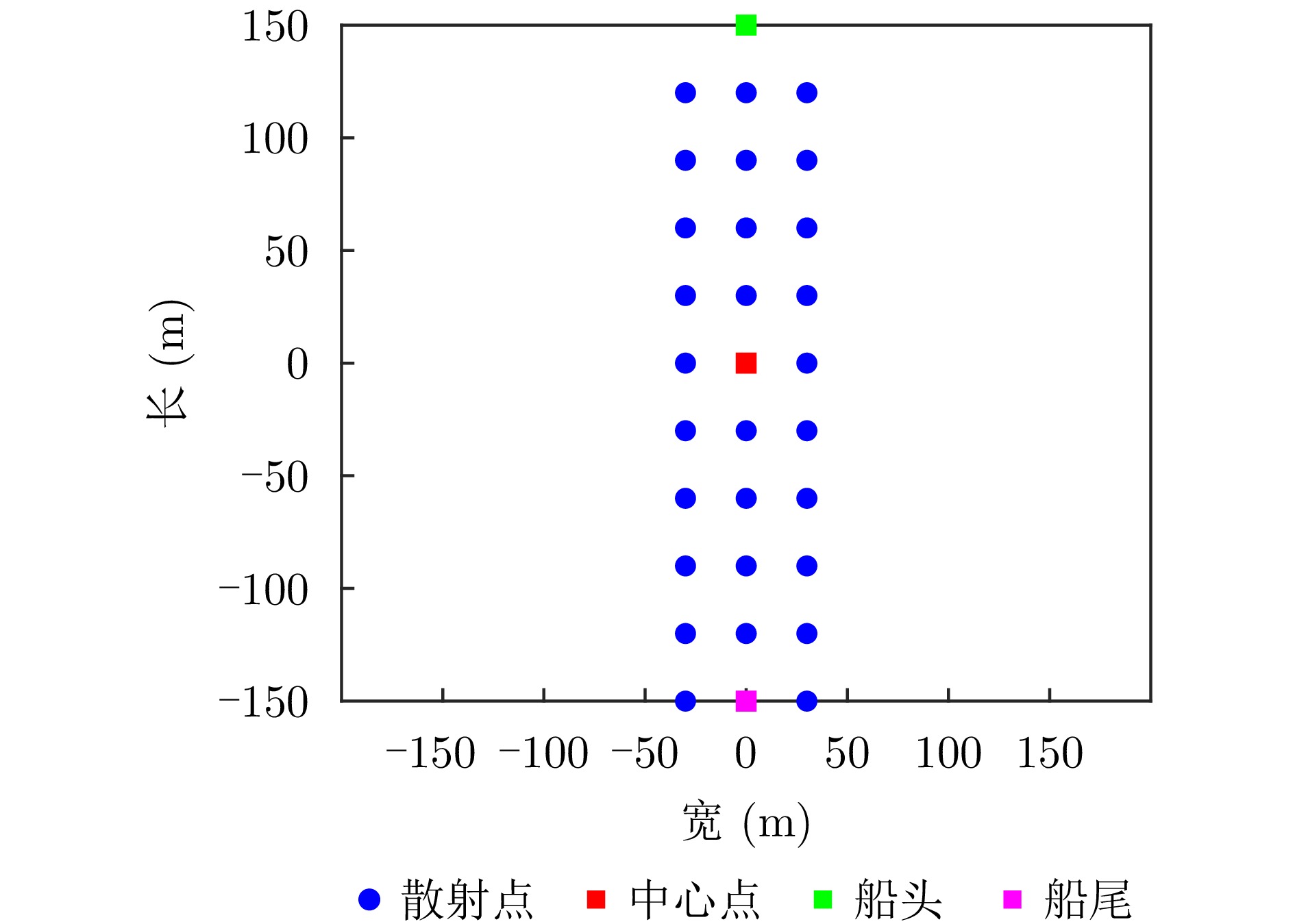
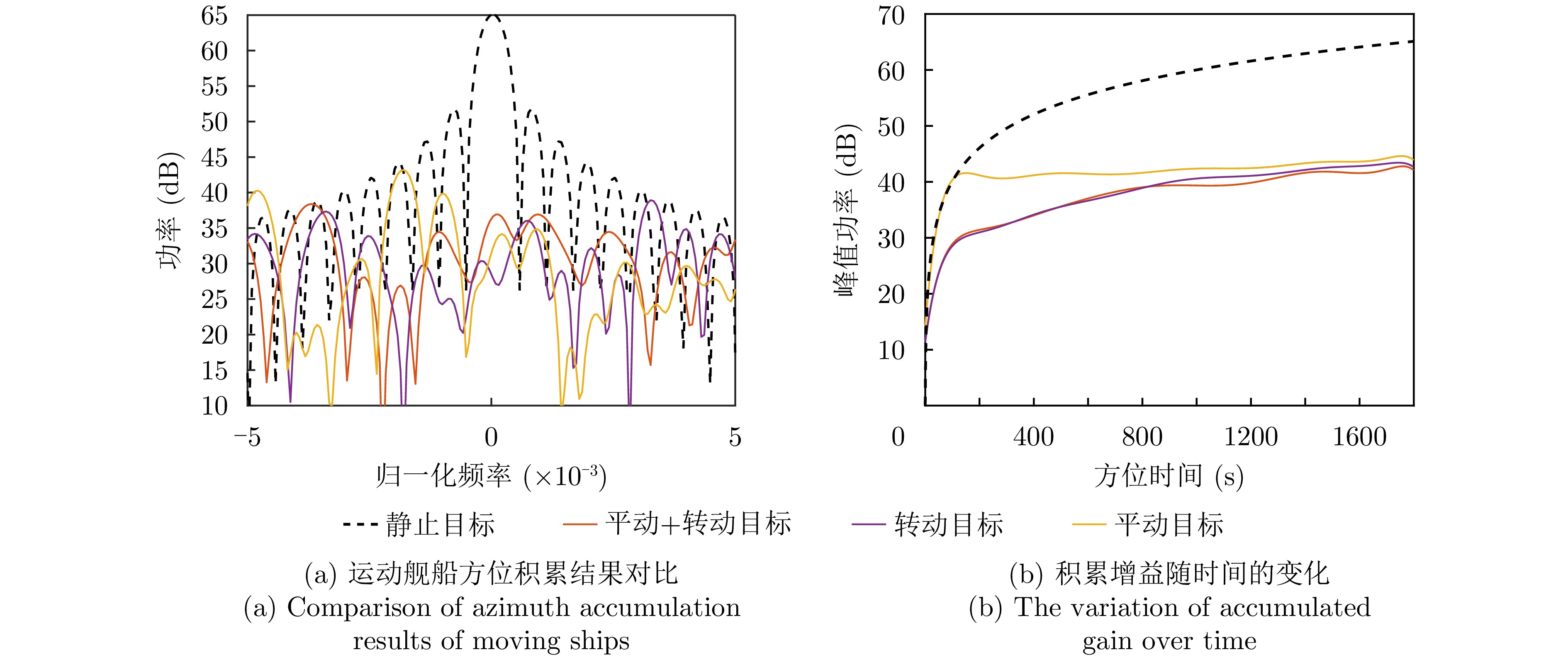
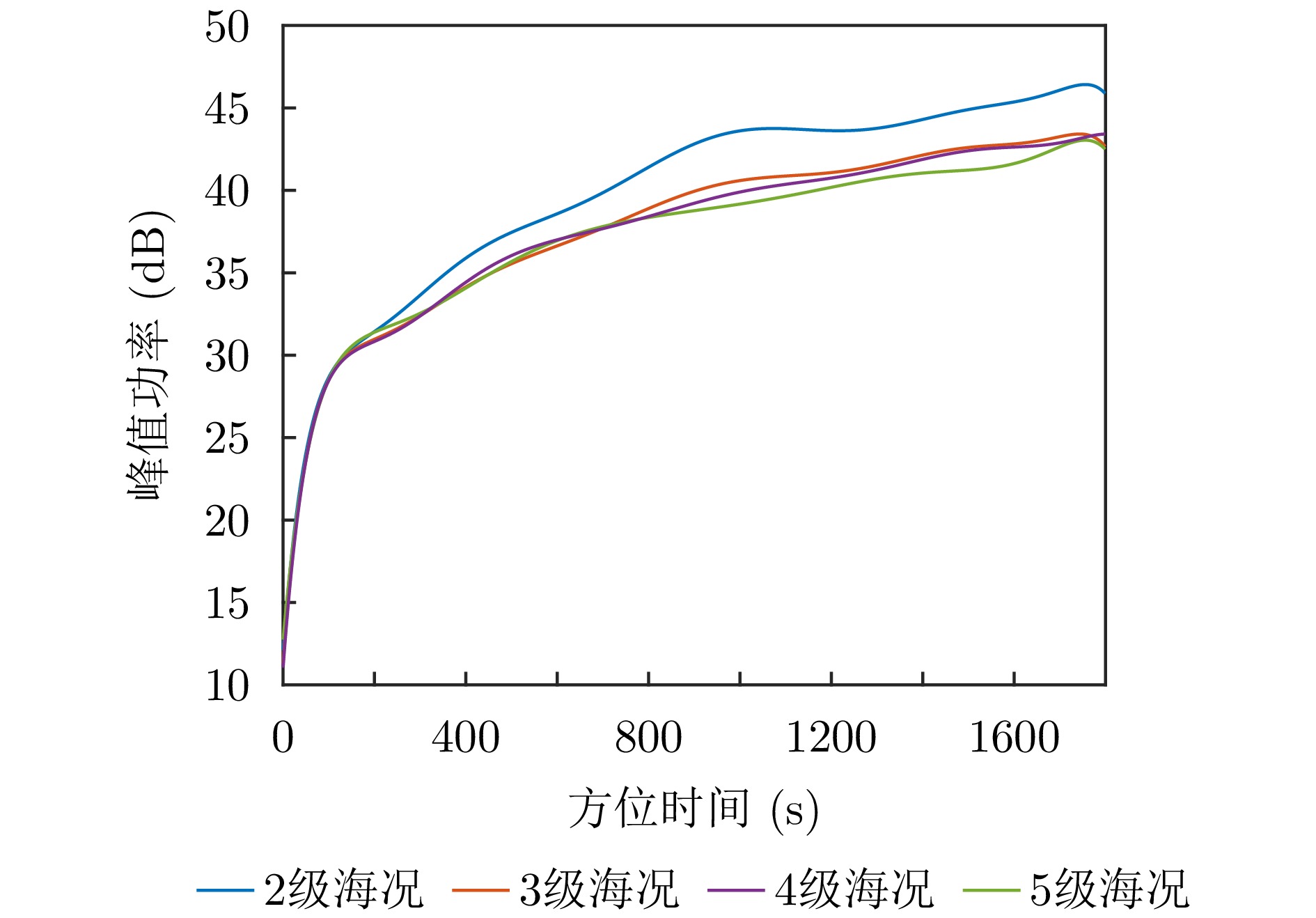
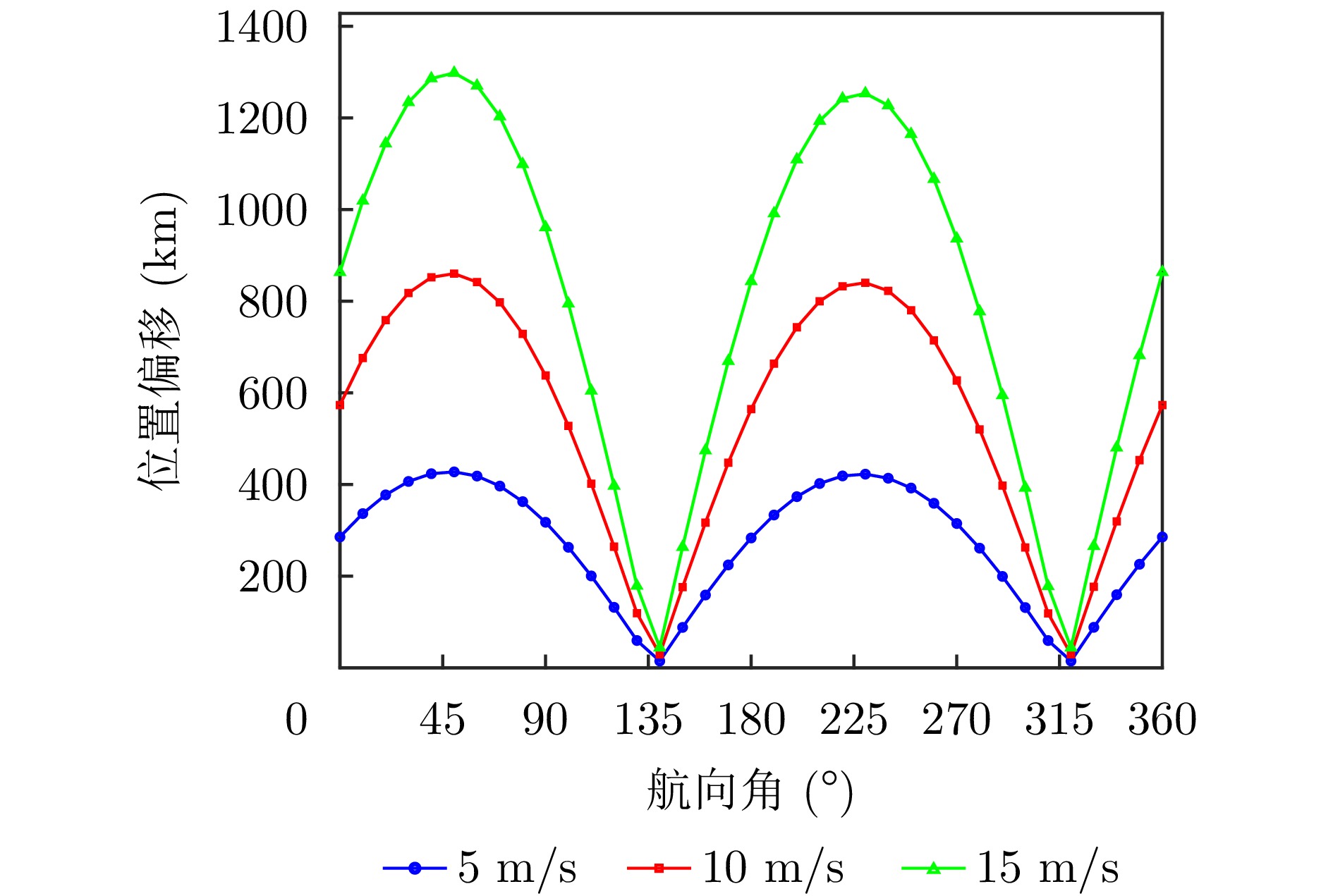
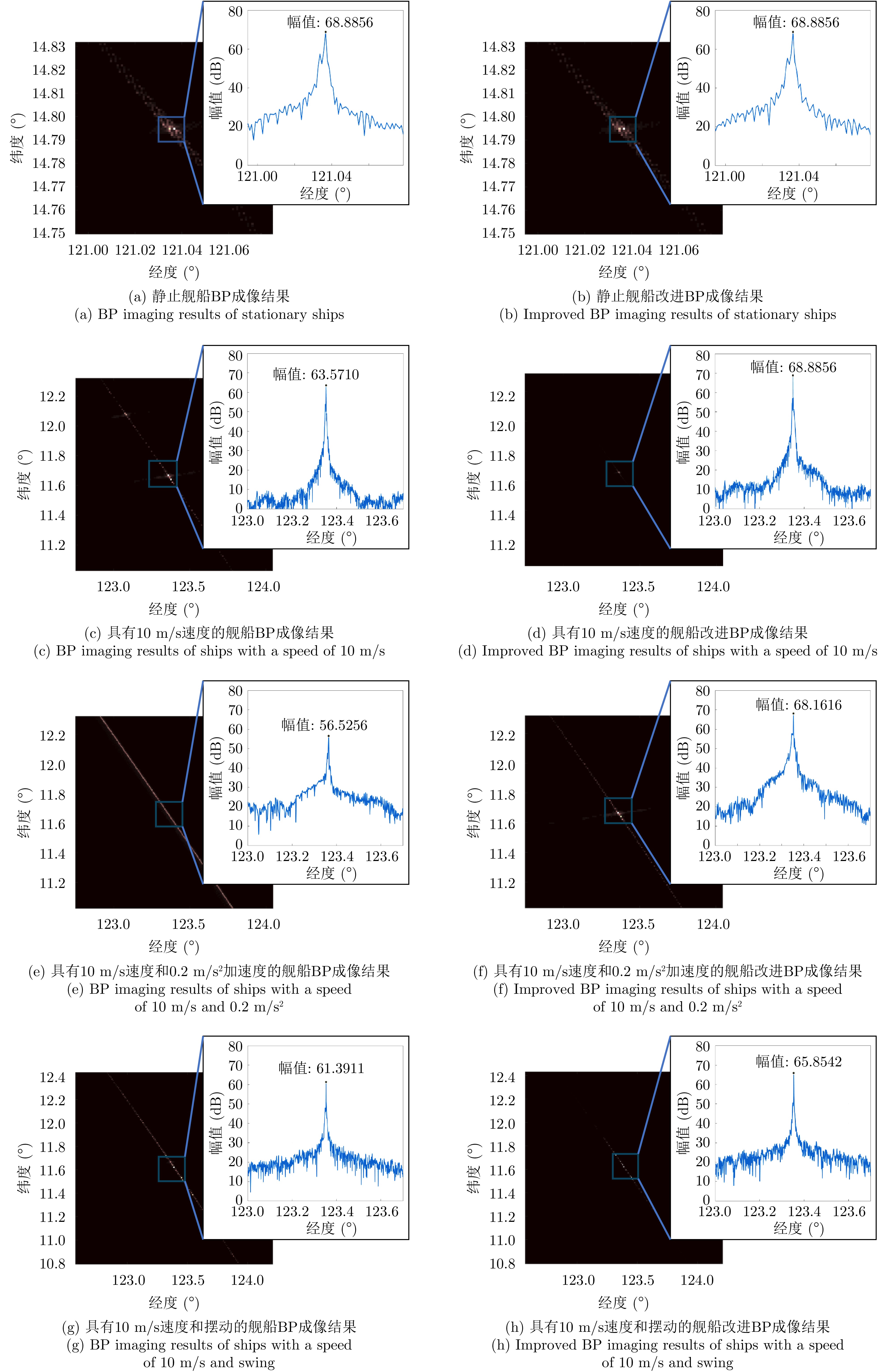
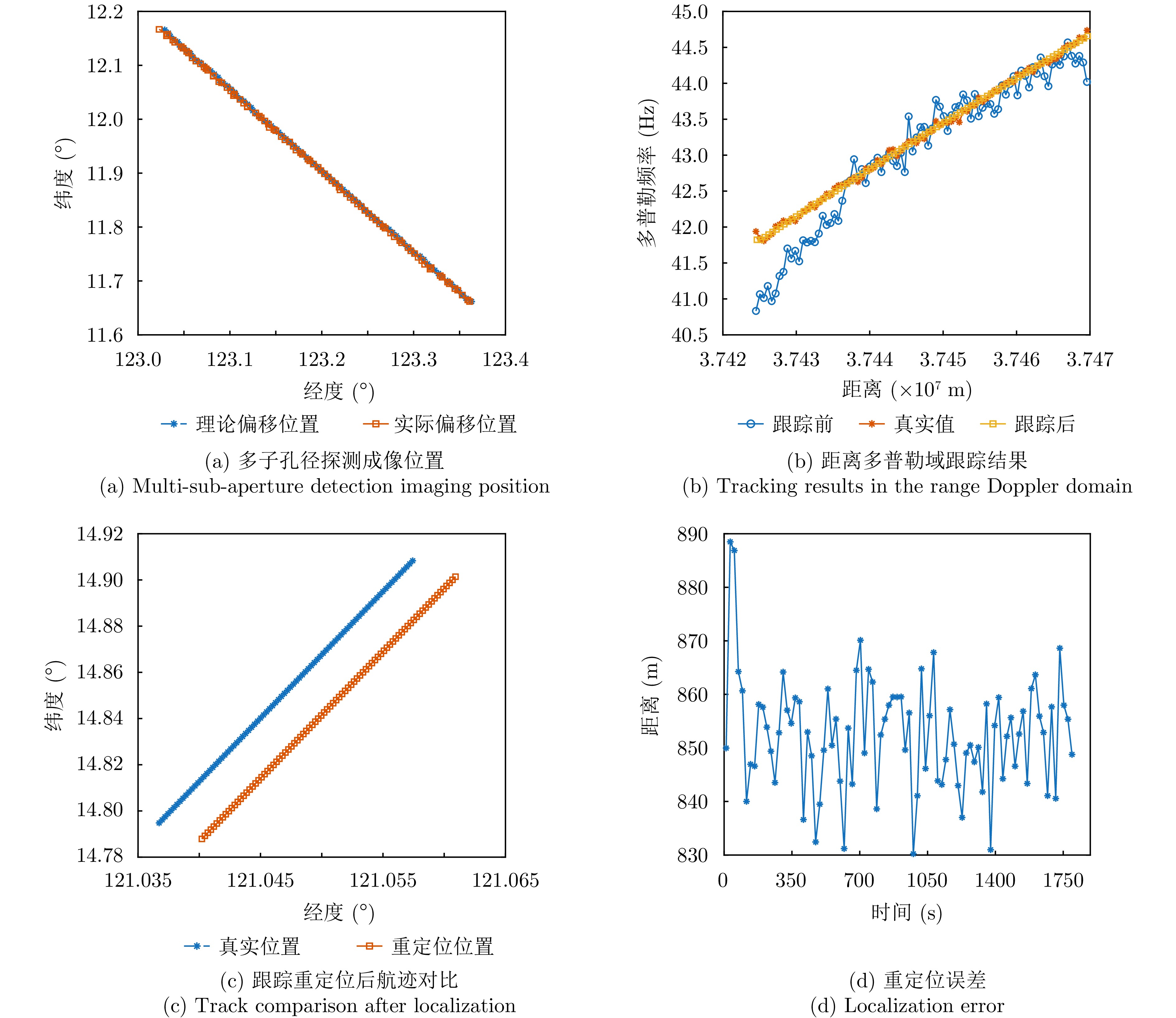
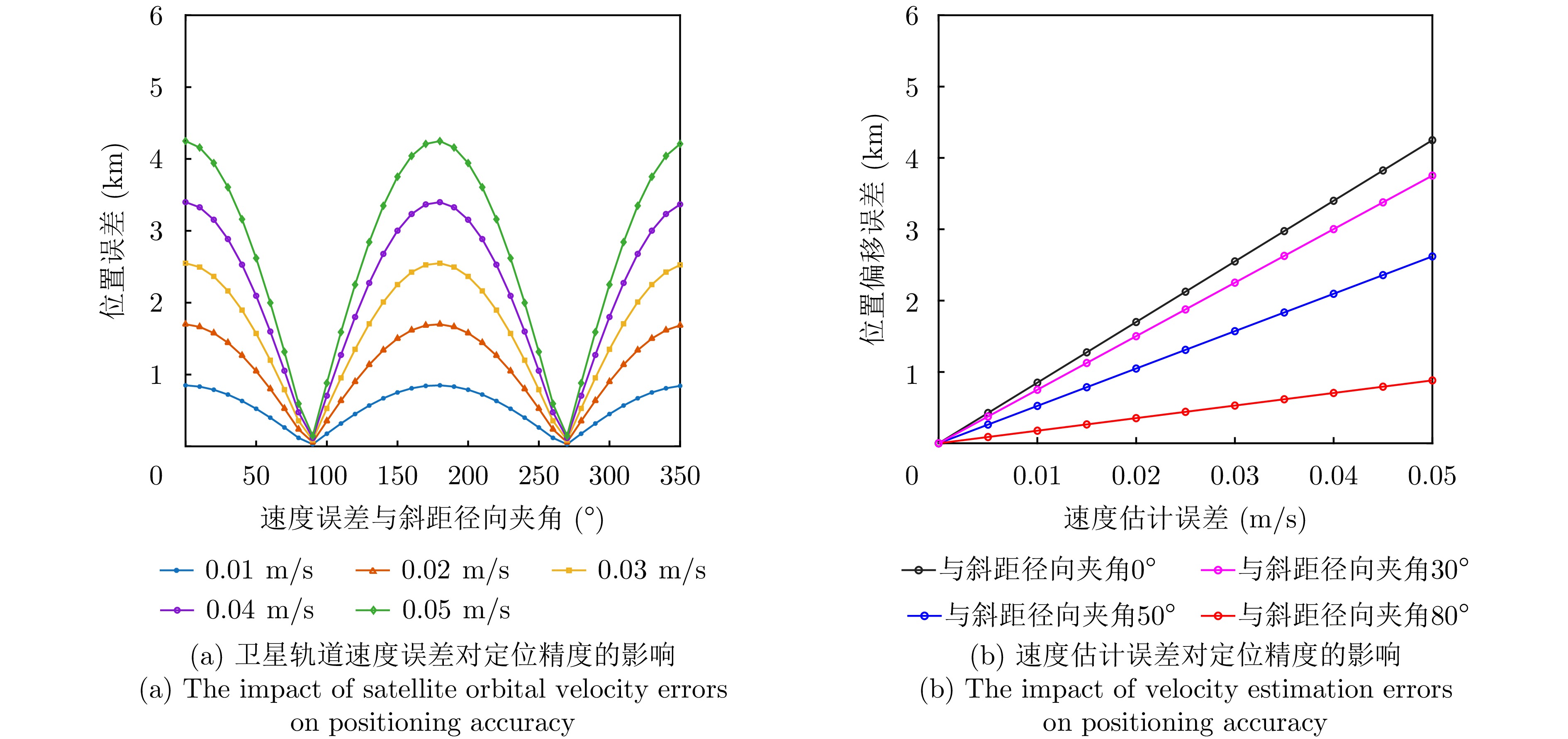
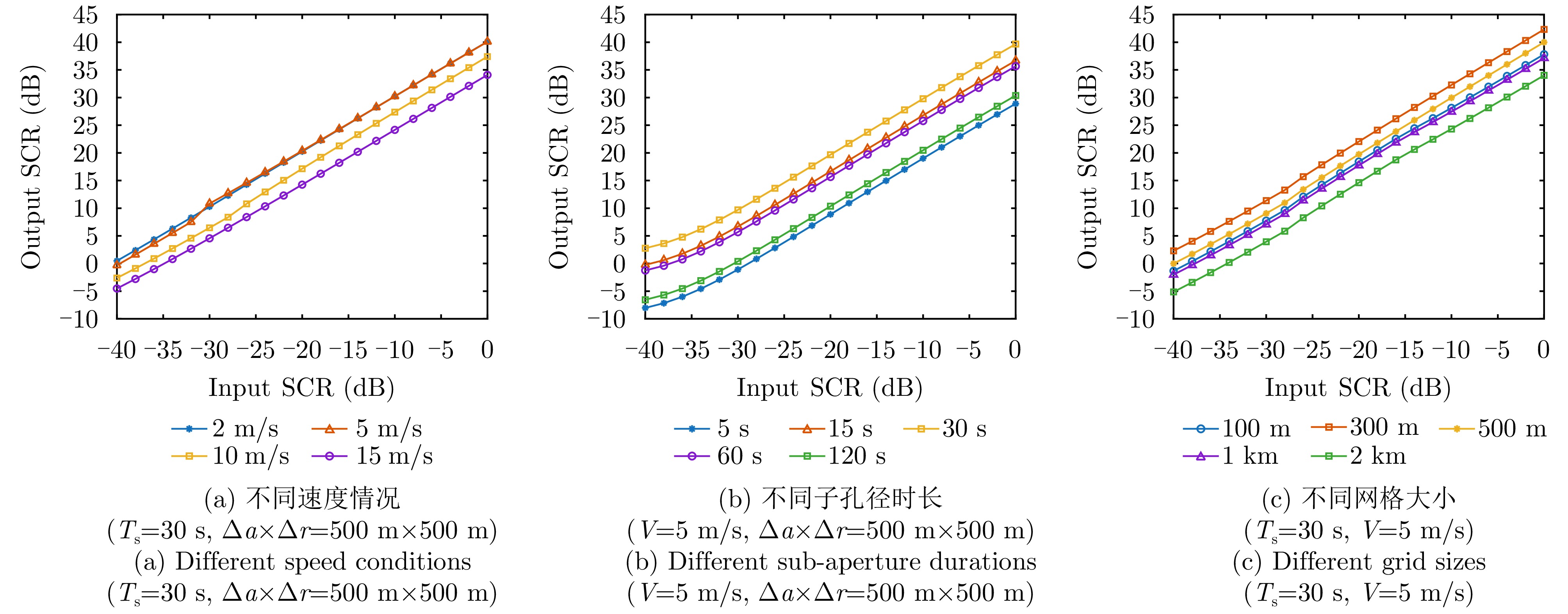
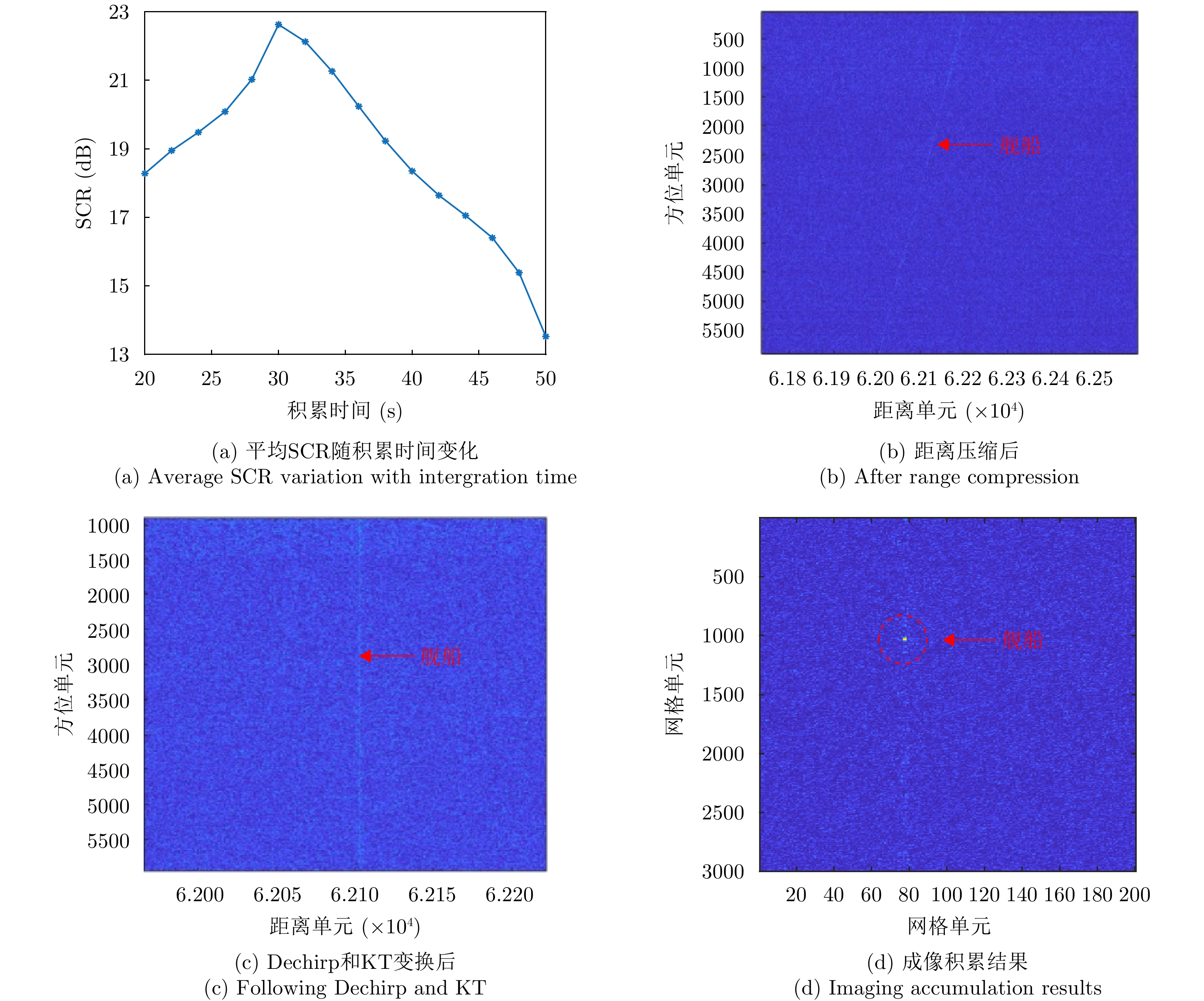
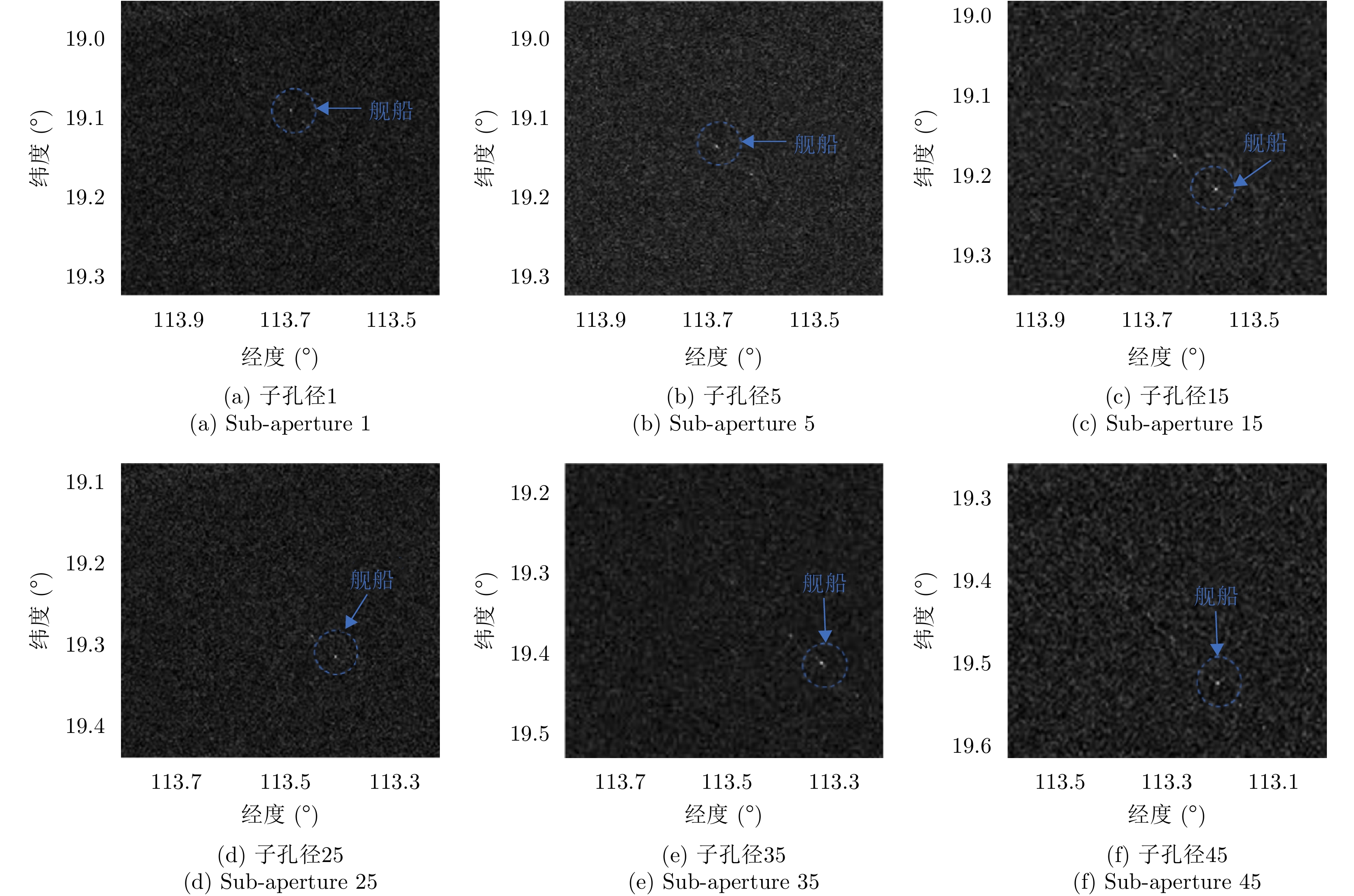
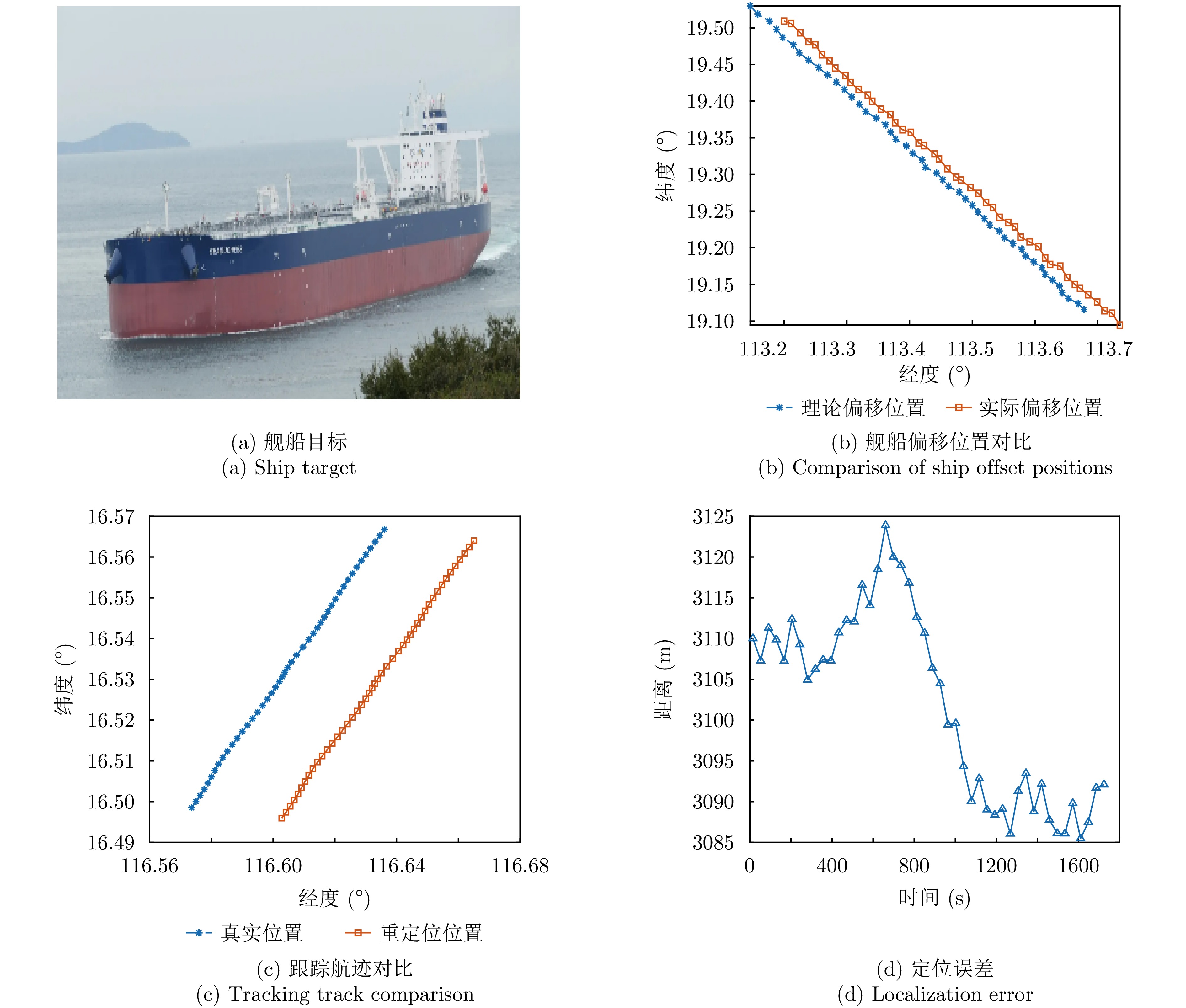
Geosynchronous Orbit (GEO) Synthetic Aperture Radar (SAR) detection ensures persistent, wide-area surveillance. However, this ship-detection method faces significant technical challenges, such as imaging defocusing, low Signal-to-Clutter Ratio (SCR), and large position offsets, due to the long detection distance, long synthetic aperture time, clutter accumulation within a large field of view, and nonplanar observation geometry. To address these challenges, this paper proposes a novel integrated detection-tracking-localization framework for moving-ship targets in GEO SAR. First, a GEO SAR observation signal model is established for moving ships, after which their echo characteristics within the ultra-long synthetic aperture time are analyzed in depth. On this basis, the model realizes target-image detection and long-term tracking localization via optimal subaperture processing. Using an improved back-projection imaging algorithm tailored for moving ships, effective energy accumulation and focusing of noncooperative ships under low SCR are achieved within the aperture. In addition, the relationship between the offset position of moving targets and the Range-Doppler (RD) parameters under GEO SAR nonplanar geometric observation is obtained. Second, under the assumption of short-term uniform ship motion, a bidirectional smoothing filter is applied to track the multisubaperture detection results. The velocity estimation of moving ships is obtained from the long-term tracking results, and the relocation of moving ships is realized using the RD relationship between the offset position and the actual position. Finally, the proposed framework is validated using simulation data and on-orbit GEO SAR satellite test data.
Geosynchronous Orbit (GEO) Synthetic Aperture Radar (SAR) detection ensures persistent, wide-area surveillance. However, this ship-detection method faces significant technical challenges, such as imaging defocusing, low Signal-to-Clutter Ratio (SCR), and large position offsets, due to the long detection distance, long synthetic aperture time, clutter accumulation within a large field of view, and nonplanar observation geometry. To address these challenges, this paper proposes a novel integrated detection-tracking-localization framework for moving-ship targets in GEO SAR. First, a GEO SAR observation signal model is established for moving ships, after which their echo characteristics within the ultra-long synthetic aperture time are analyzed in depth. On this basis, the model realizes target-image detection and long-term tracking localization via optimal subaperture processing. Using an improved back-projection imaging algorithm tailored for moving ships, effective energy accumulation and focusing of noncooperative ships under low SCR are achieved within the aperture. In addition, the relationship between the offset position of moving targets and the Range-Doppler (RD) parameters under GEO SAR nonplanar geometric observation is obtained. Second, under the assumption of short-term uniform ship motion, a bidirectional smoothing filter is applied to track the multisubaperture detection results. The velocity estimation of moving ships is obtained from the long-term tracking results, and the relocation of moving ships is realized using the RD relationship between the offset position and the actual position. Finally, the proposed framework is validated using simulation data and on-orbit GEO SAR satellite test data.
2026,
15(2):
710-726.
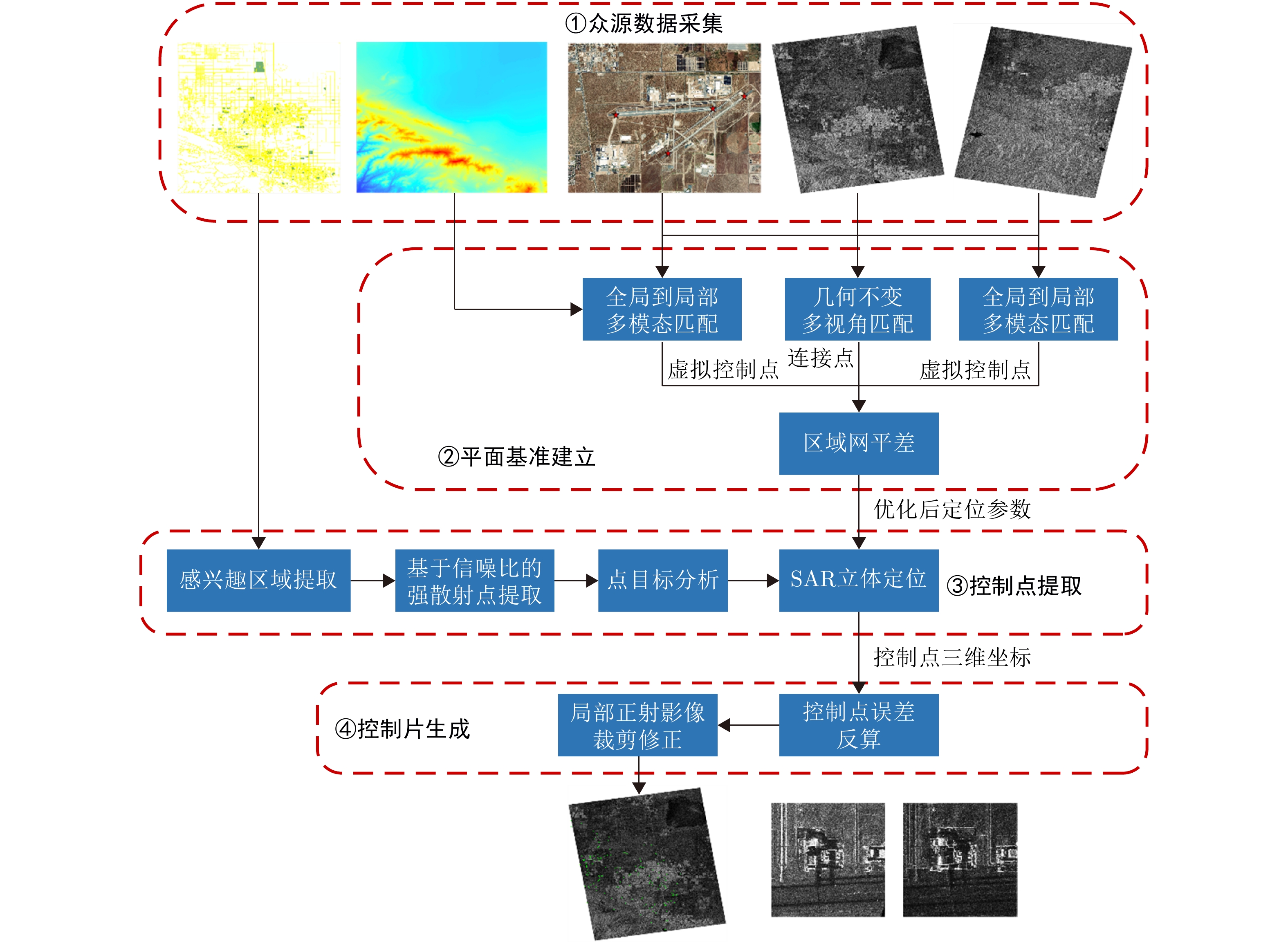
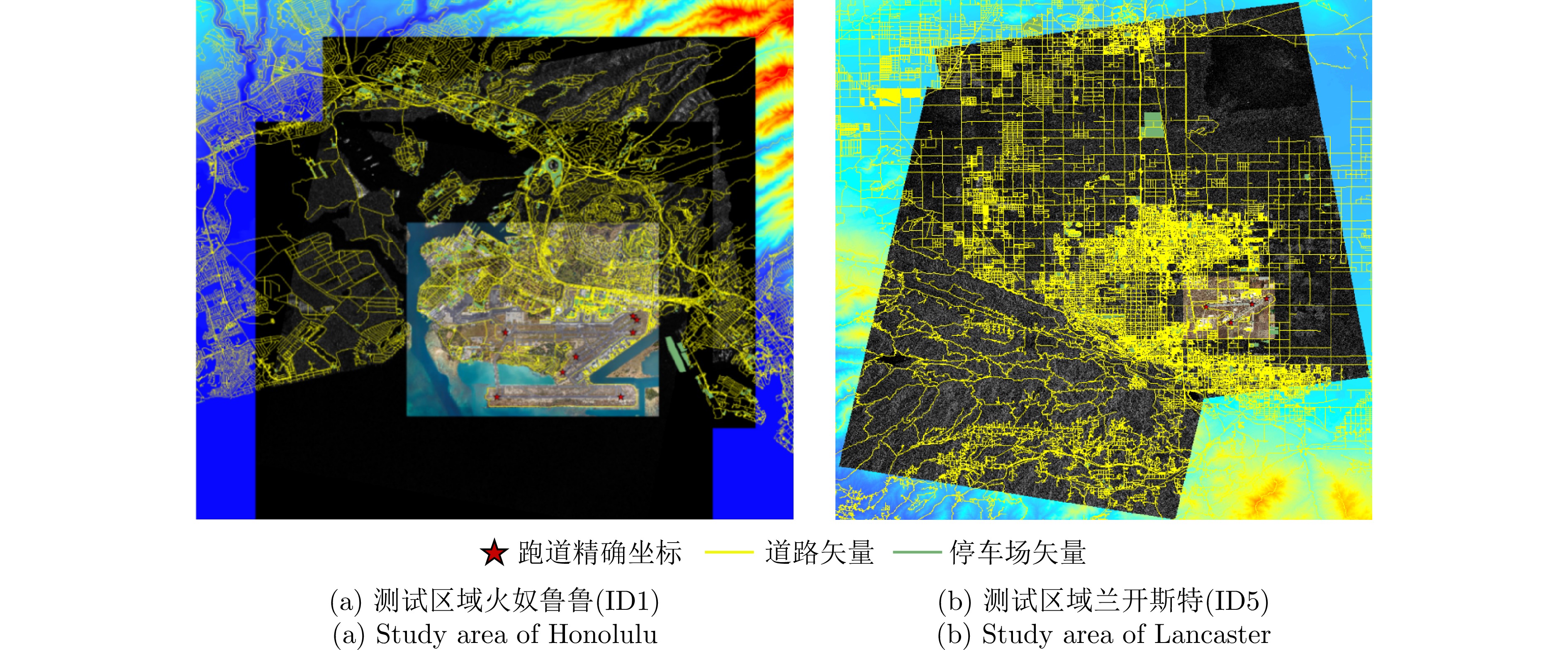
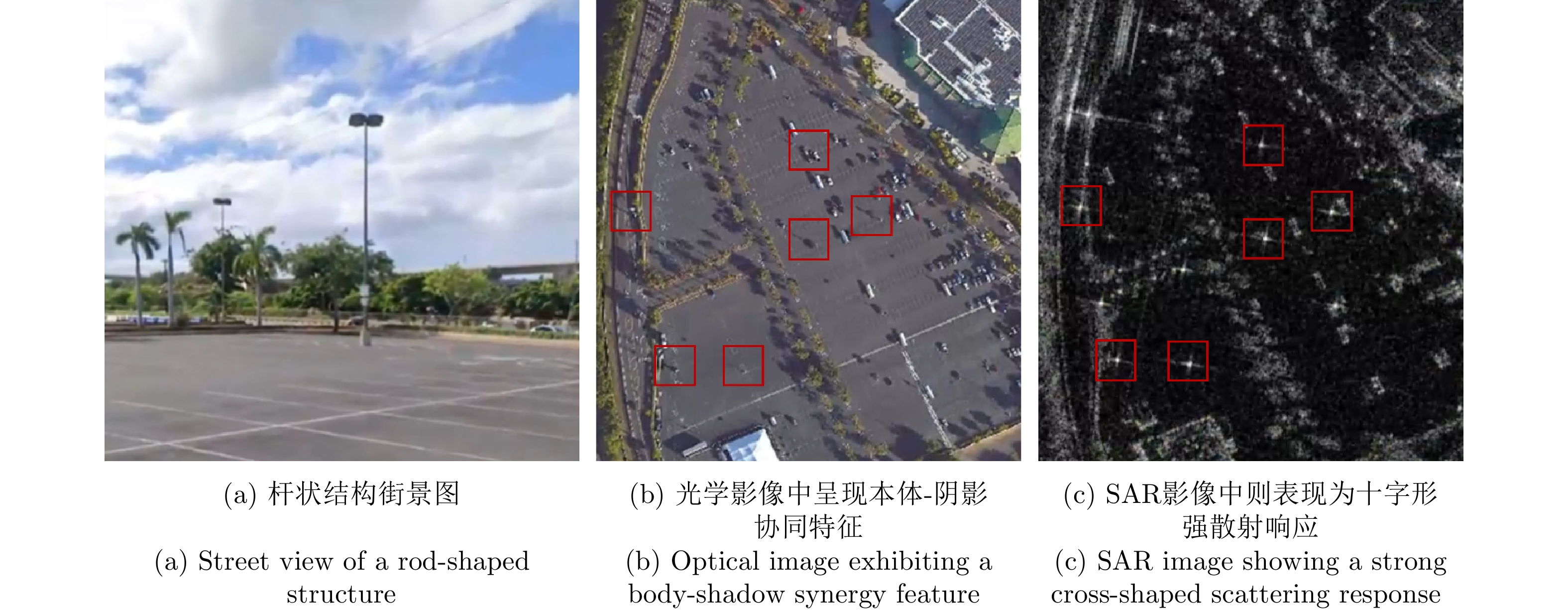
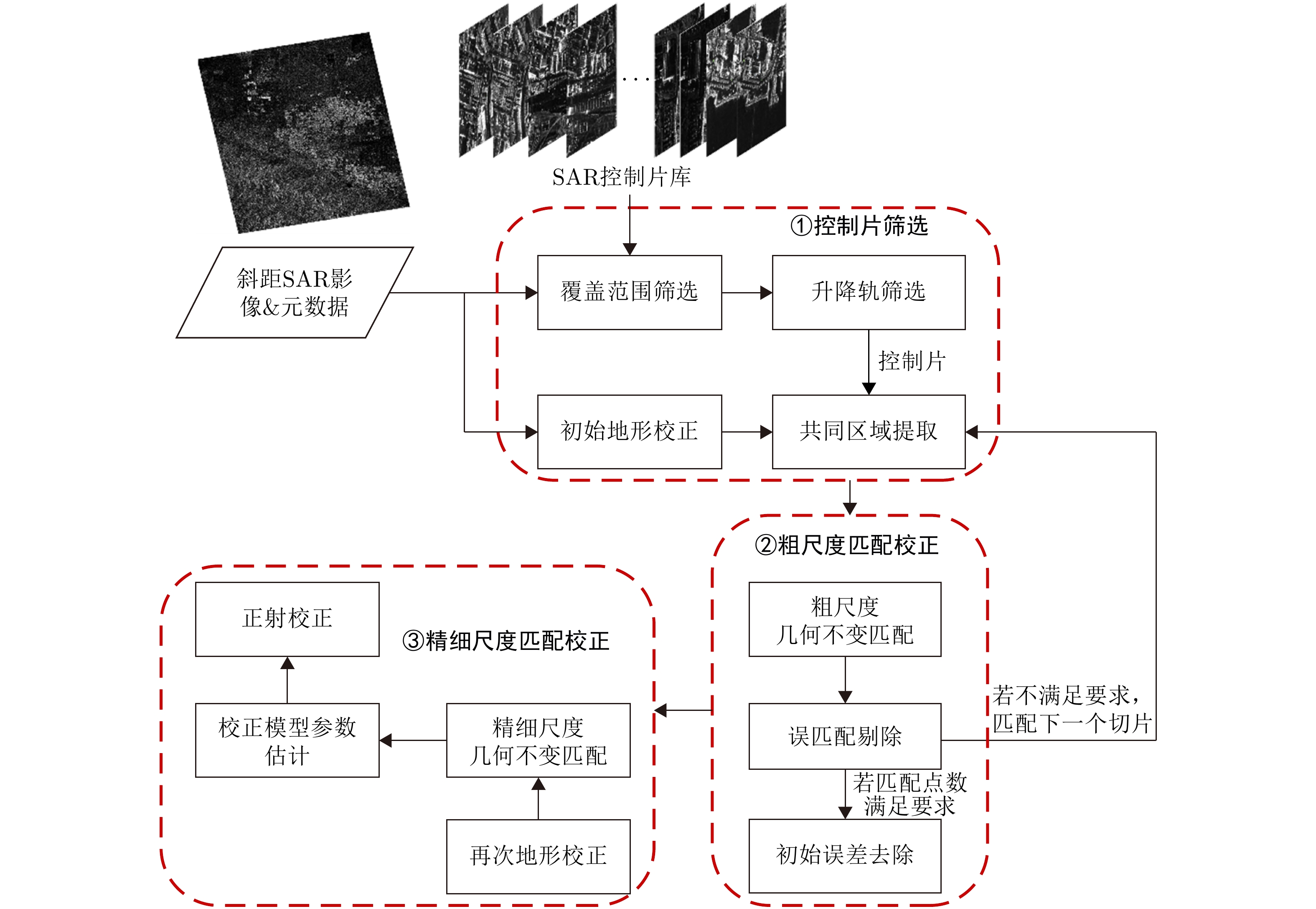
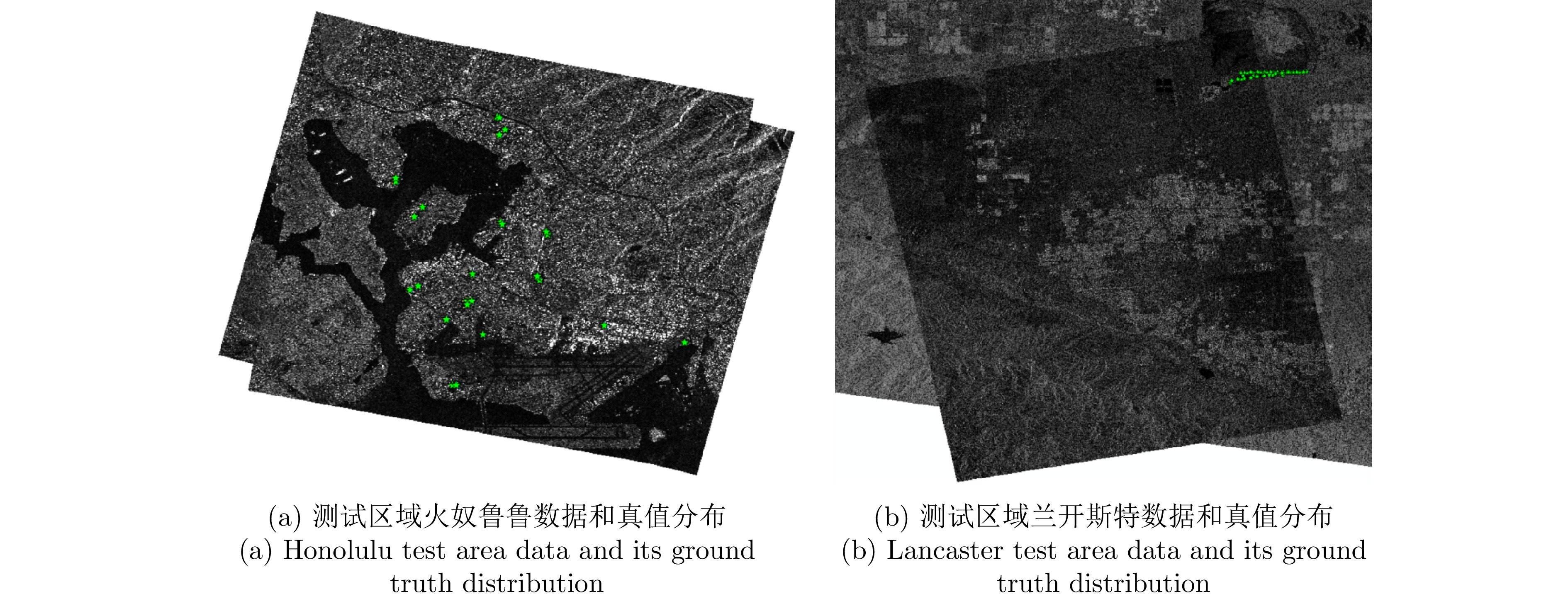
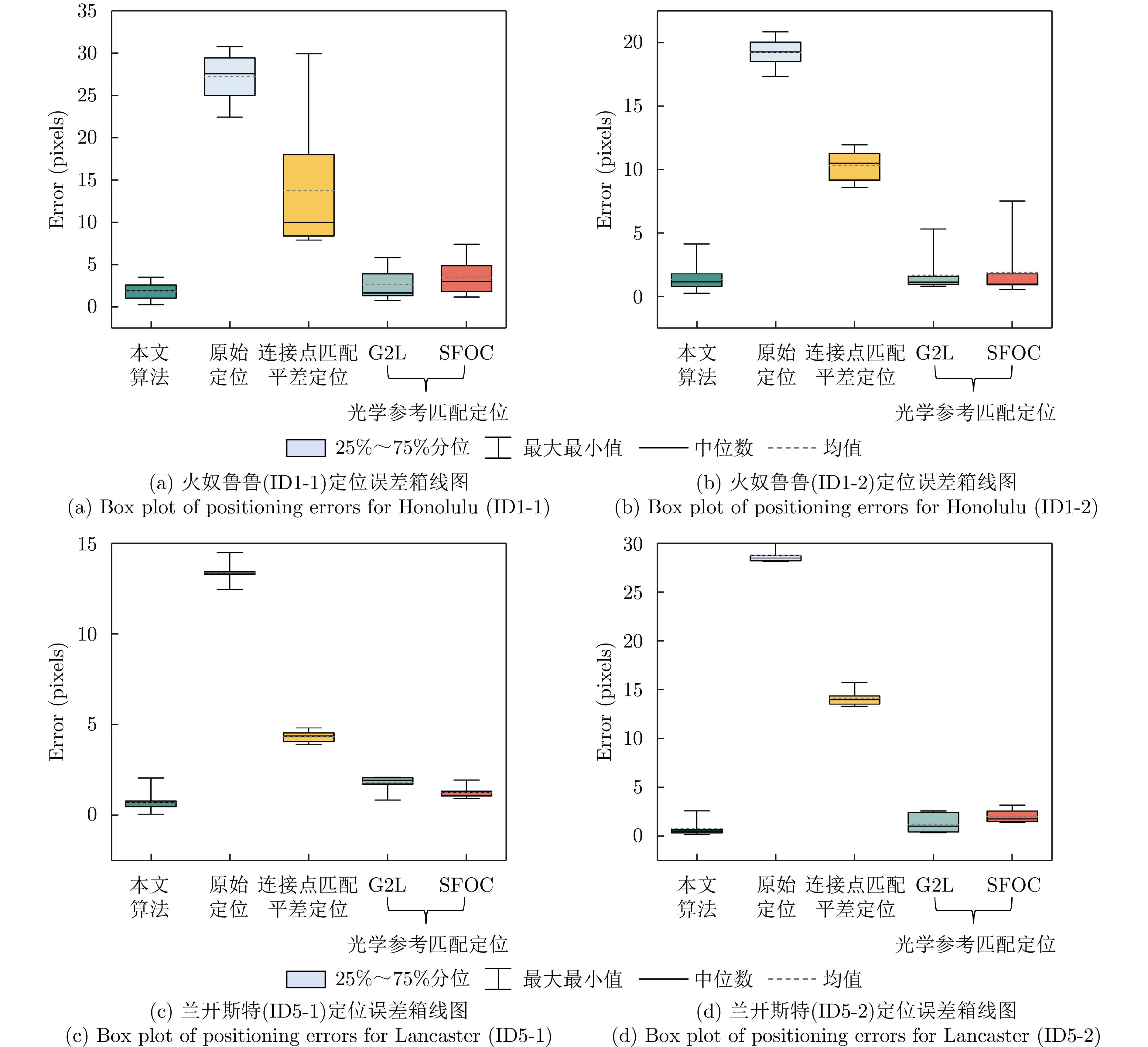
Ground Control Points (GCPs) are essential for improving the positioning accuracy of remote sensing imagery. Their spatial distribution and geometric quality directly affect the reliability of orthorectification. GCPs serve as a critical foundation for ensuring the accuracy of multi-source image fusion, change detection, and quantitative inversion. However, traditional corner reflector deployment presents high costs and implementation difficulties, struggling to meet global application demands. Additionally, existing heterogeneous control points (such as optical imagery and laser altimetry data) exhibit significant modal differences relative to Synthetic Aperture Radar (SAR) imagery, which affects their ability to balance accuracy and robustness. To address these challenges, this study proposes an automatic control point extraction method for high-resolution SAR imagery based on multi-source data. Furthermore, a high-precision orthorectification framework is established using control chips. The method leverages the characteristics of widely distributed pole-like artificial features in urban environments: these features exhibit a body-shadow collaborative structure in optical imagery and a cross-shaped strong scattering response in SAR imagery. First, open-source airport runway data are used to correct Google optical imagery, establishing a planar reference framework. Next, initial positioning optimization for stereo SAR images from ascending and descending orbits is achieved by jointly adjusting optical-SAR and stereo SAR image matching points. Finally, road and parking lot vector data are utilized to extract regions of interest, where strong scattering points are identified using a signal-to-clutter ratio detection algorithm. Three-dimensional spatial coordinates of control points are obtained via point target analysis and stereo positioning techniques. After correcting residual planar errors in stereo SAR images using control point coordinates, control chip data for ascending and descending orbit SAR images are generated. Validation experiments using GaoFen-3 SAR images from multiple regions show that the 3D positioning accuracy of control points extracted from spotlight mode stereo SAR imagery reaches the submeter level. Orthorectification of test images using extracted control points and control chips significantly improves positioning accuracy, as verified by corner reflectors and airborne LiDAR point cloud-based ground truth. Positioning errors are 1.78 pixels (spotlight mode), 1.09 pixels (ultrafine stripmap mode), and 0.82 pixels (fine stripmap mode), corresponding to improvements of 47.2%, 49.3%, and 37.4%, respectively, compared to traditional optical reference image matching correction methods. This study introduces crowdsourced information to assist SAR control point extraction and ascending/descending orbit SAR control chip construction, overcoming the accuracy limitations of optical reference image matching correction. The proposed method provides a scalable approach for high-precision positioning and joint processing of high-resolution SAR imagery.
Ground Control Points (GCPs) are essential for improving the positioning accuracy of remote sensing imagery. Their spatial distribution and geometric quality directly affect the reliability of orthorectification. GCPs serve as a critical foundation for ensuring the accuracy of multi-source image fusion, change detection, and quantitative inversion. However, traditional corner reflector deployment presents high costs and implementation difficulties, struggling to meet global application demands. Additionally, existing heterogeneous control points (such as optical imagery and laser altimetry data) exhibit significant modal differences relative to Synthetic Aperture Radar (SAR) imagery, which affects their ability to balance accuracy and robustness. To address these challenges, this study proposes an automatic control point extraction method for high-resolution SAR imagery based on multi-source data. Furthermore, a high-precision orthorectification framework is established using control chips. The method leverages the characteristics of widely distributed pole-like artificial features in urban environments: these features exhibit a body-shadow collaborative structure in optical imagery and a cross-shaped strong scattering response in SAR imagery. First, open-source airport runway data are used to correct Google optical imagery, establishing a planar reference framework. Next, initial positioning optimization for stereo SAR images from ascending and descending orbits is achieved by jointly adjusting optical-SAR and stereo SAR image matching points. Finally, road and parking lot vector data are utilized to extract regions of interest, where strong scattering points are identified using a signal-to-clutter ratio detection algorithm. Three-dimensional spatial coordinates of control points are obtained via point target analysis and stereo positioning techniques. After correcting residual planar errors in stereo SAR images using control point coordinates, control chip data for ascending and descending orbit SAR images are generated. Validation experiments using GaoFen-3 SAR images from multiple regions show that the 3D positioning accuracy of control points extracted from spotlight mode stereo SAR imagery reaches the submeter level. Orthorectification of test images using extracted control points and control chips significantly improves positioning accuracy, as verified by corner reflectors and airborne LiDAR point cloud-based ground truth. Positioning errors are 1.78 pixels (spotlight mode), 1.09 pixels (ultrafine stripmap mode), and 0.82 pixels (fine stripmap mode), corresponding to improvements of 47.2%, 49.3%, and 37.4%, respectively, compared to traditional optical reference image matching correction methods. This study introduces crowdsourced information to assist SAR control point extraction and ascending/descending orbit SAR control chip construction, overcoming the accuracy limitations of optical reference image matching correction. The proposed method provides a scalable approach for high-precision positioning and joint processing of high-resolution SAR imagery.

2026,
15(2):
727-745.
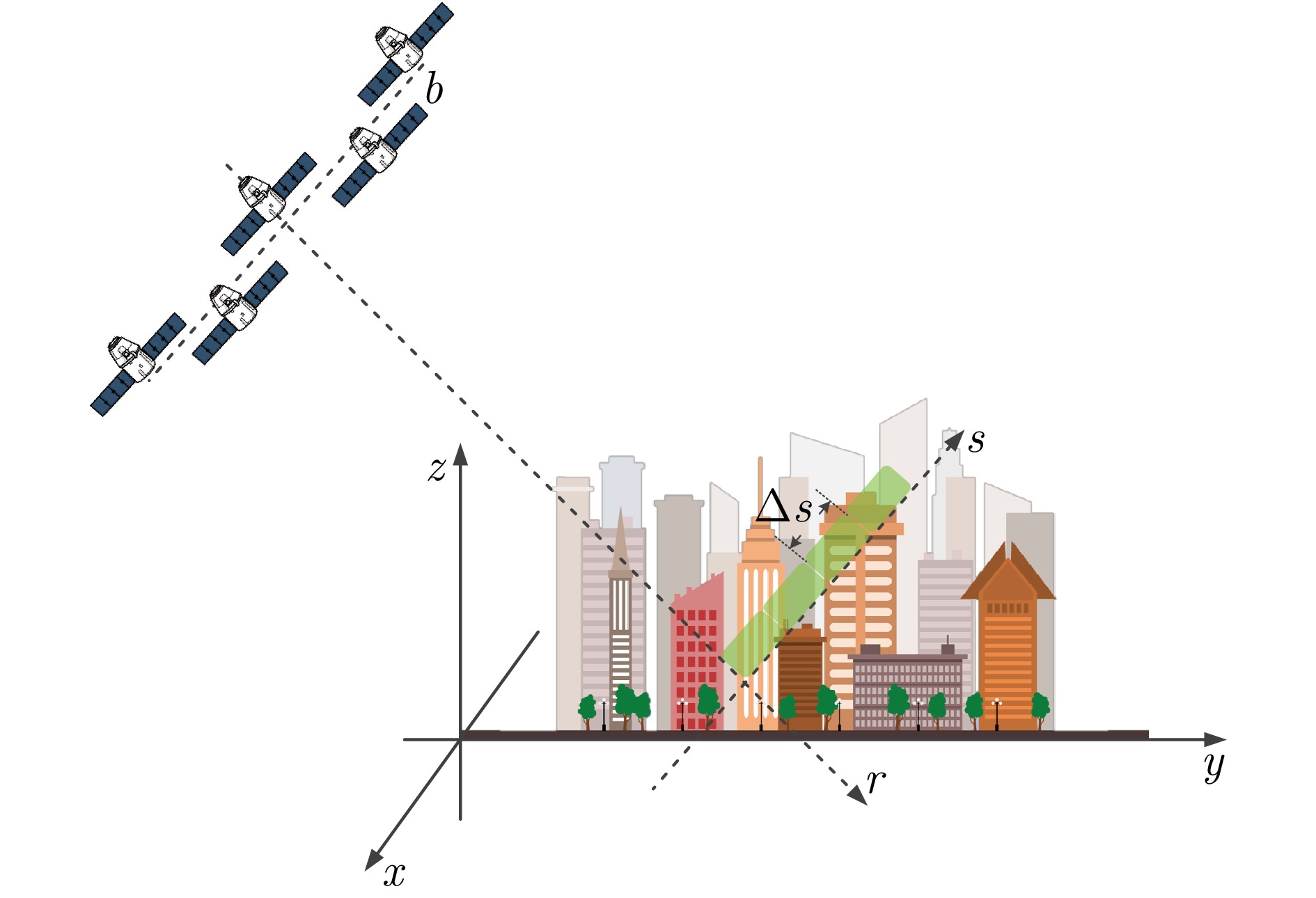
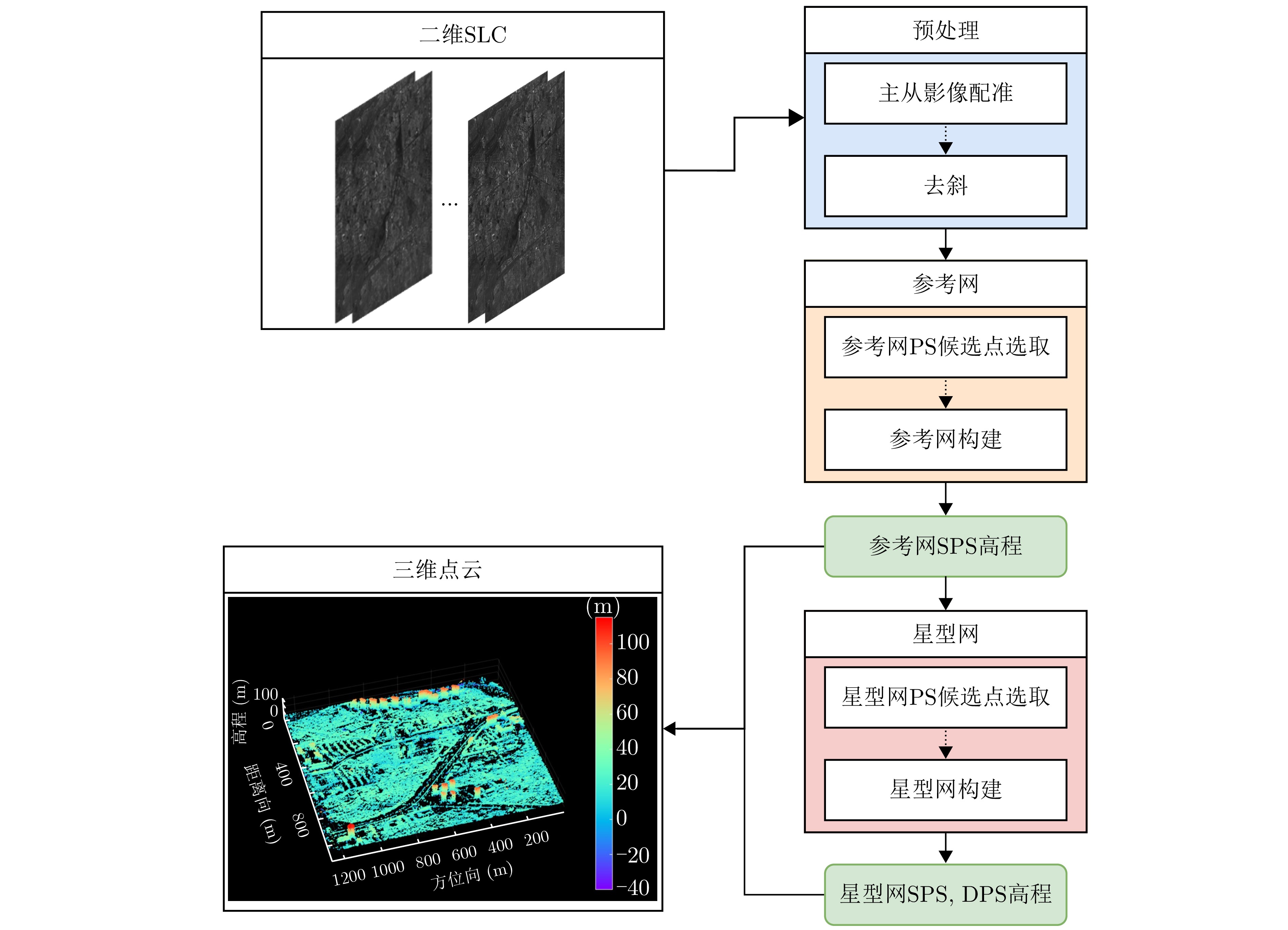
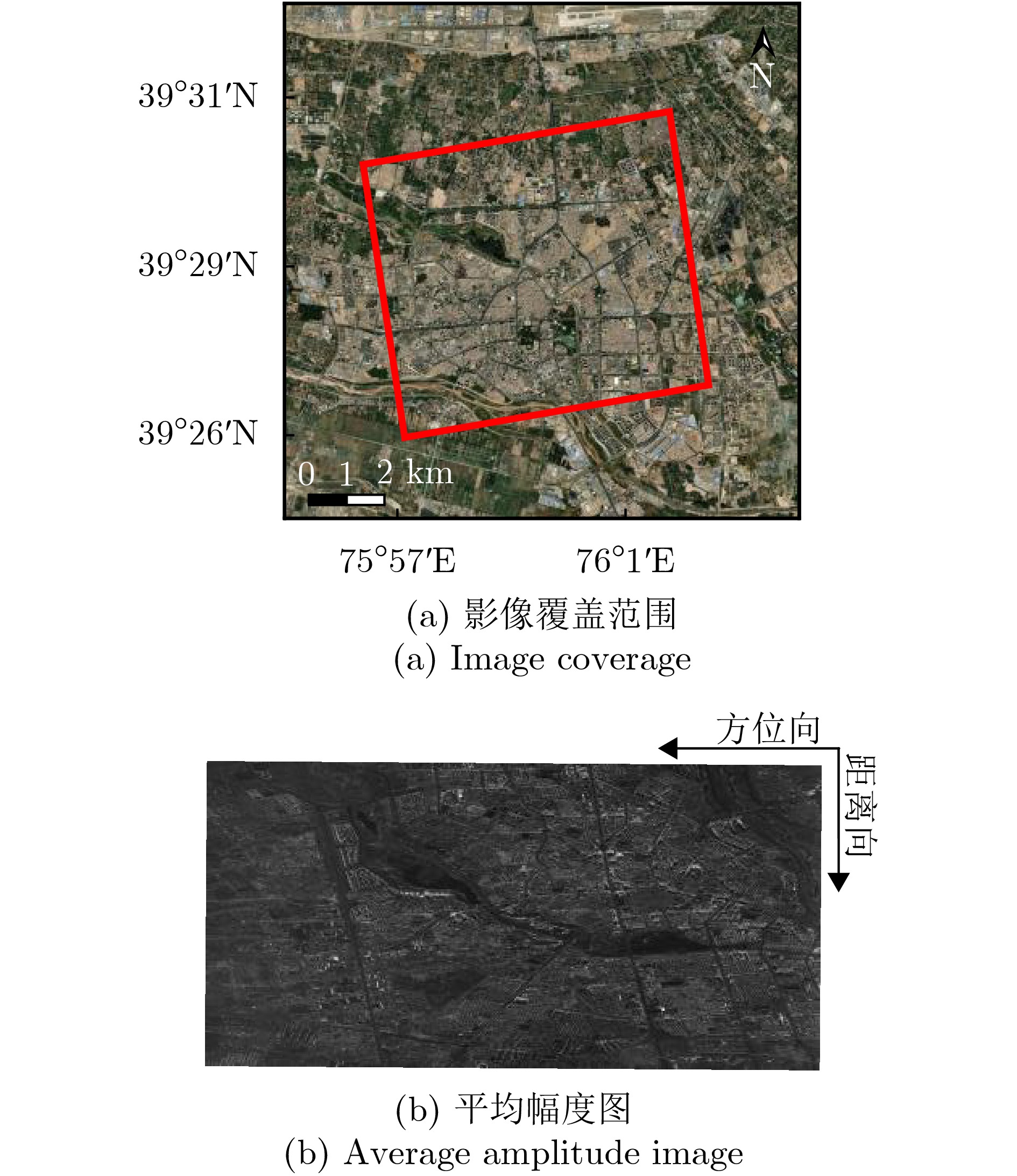
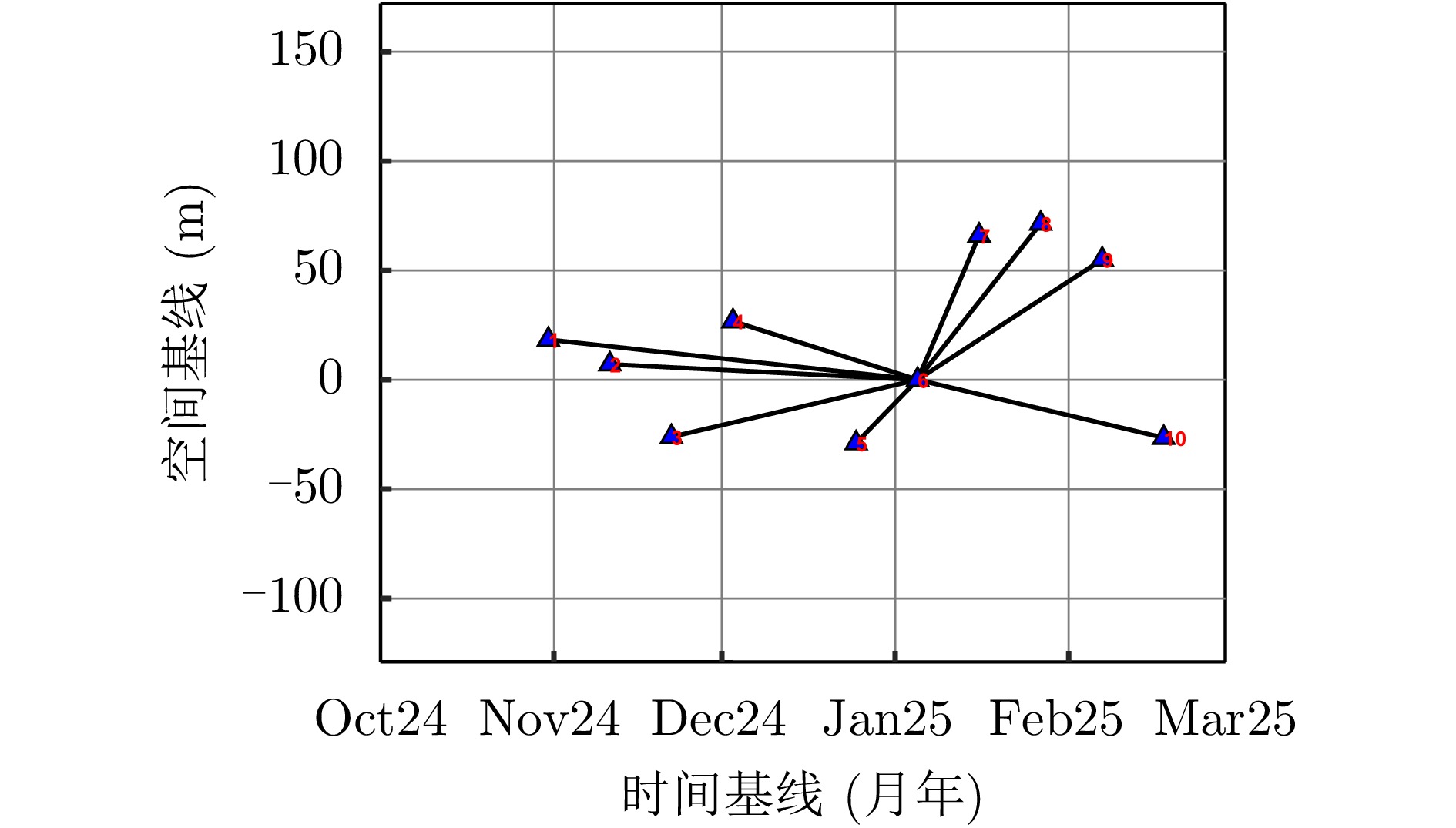
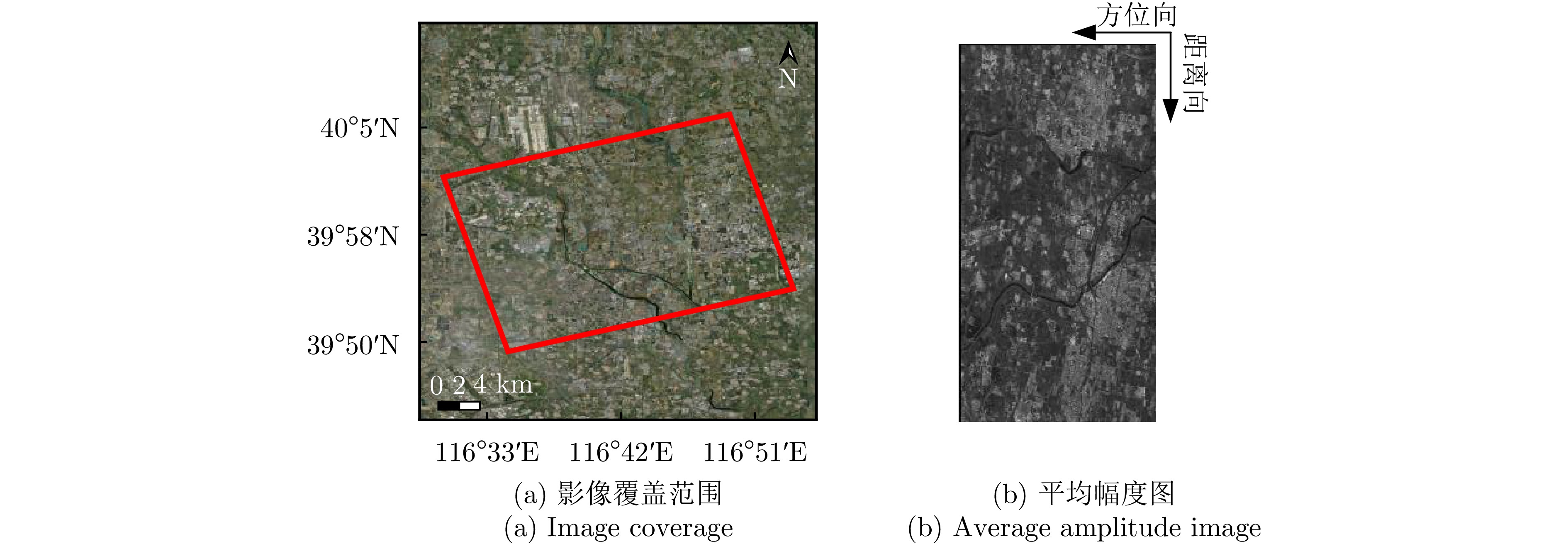
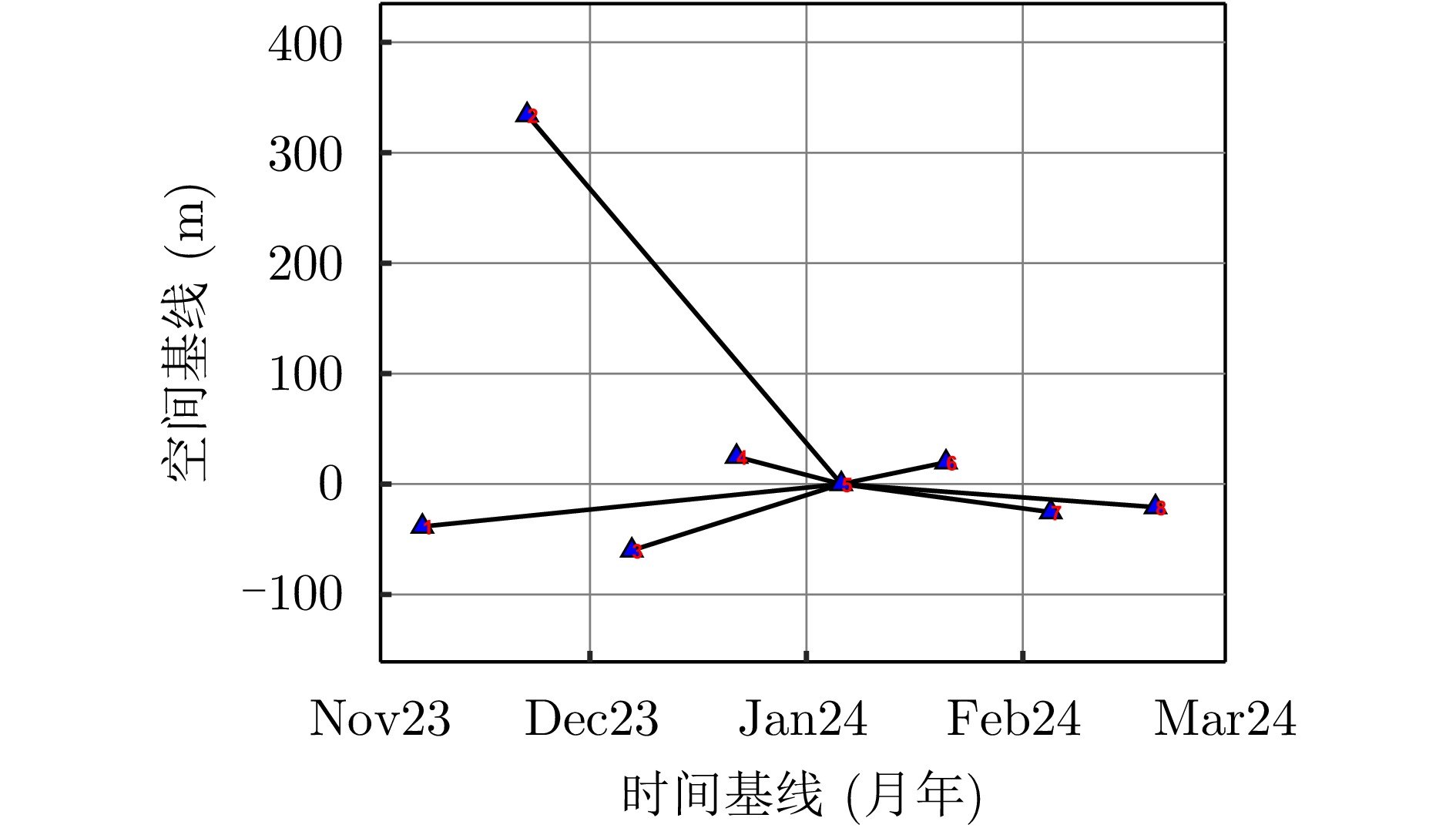
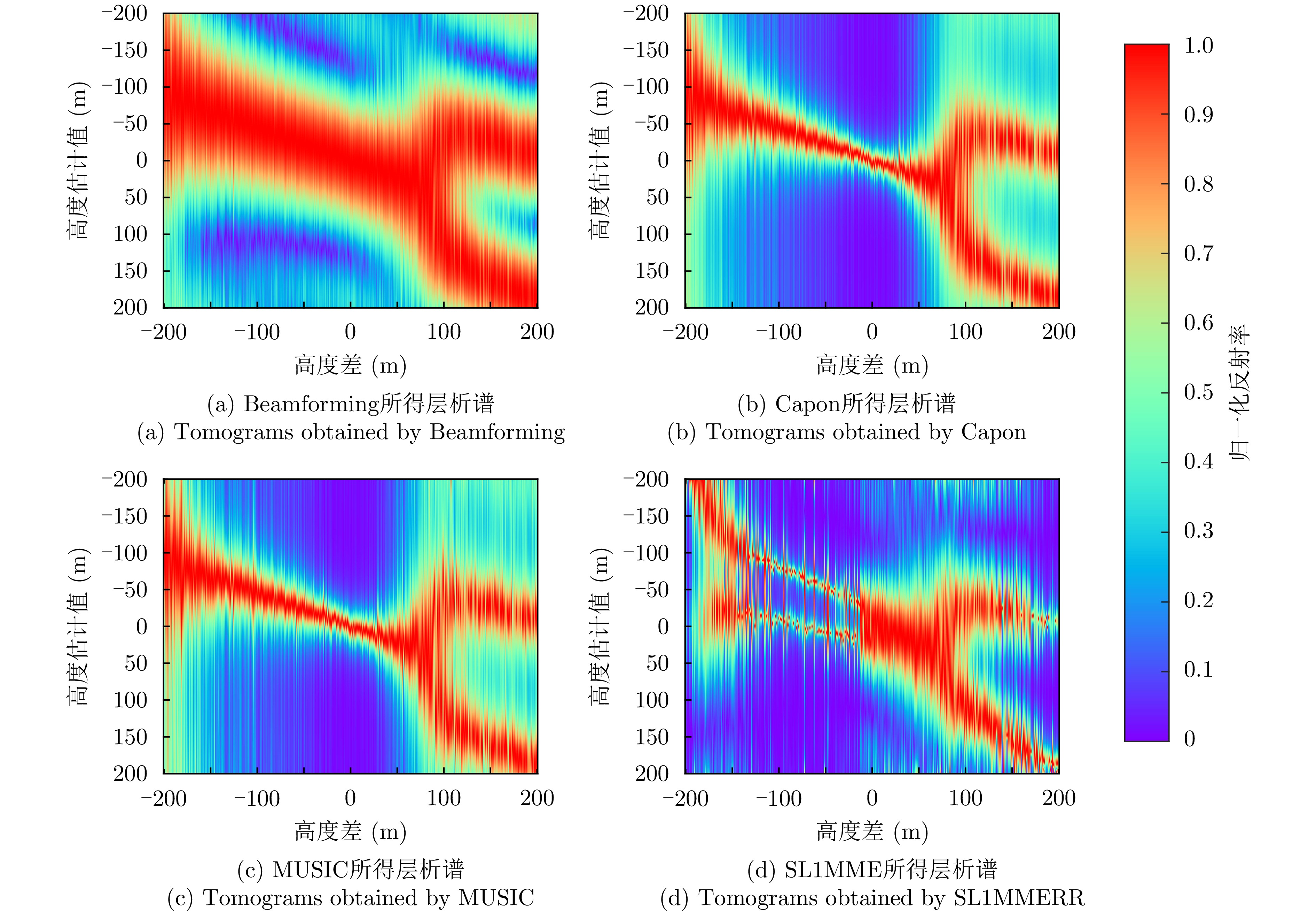
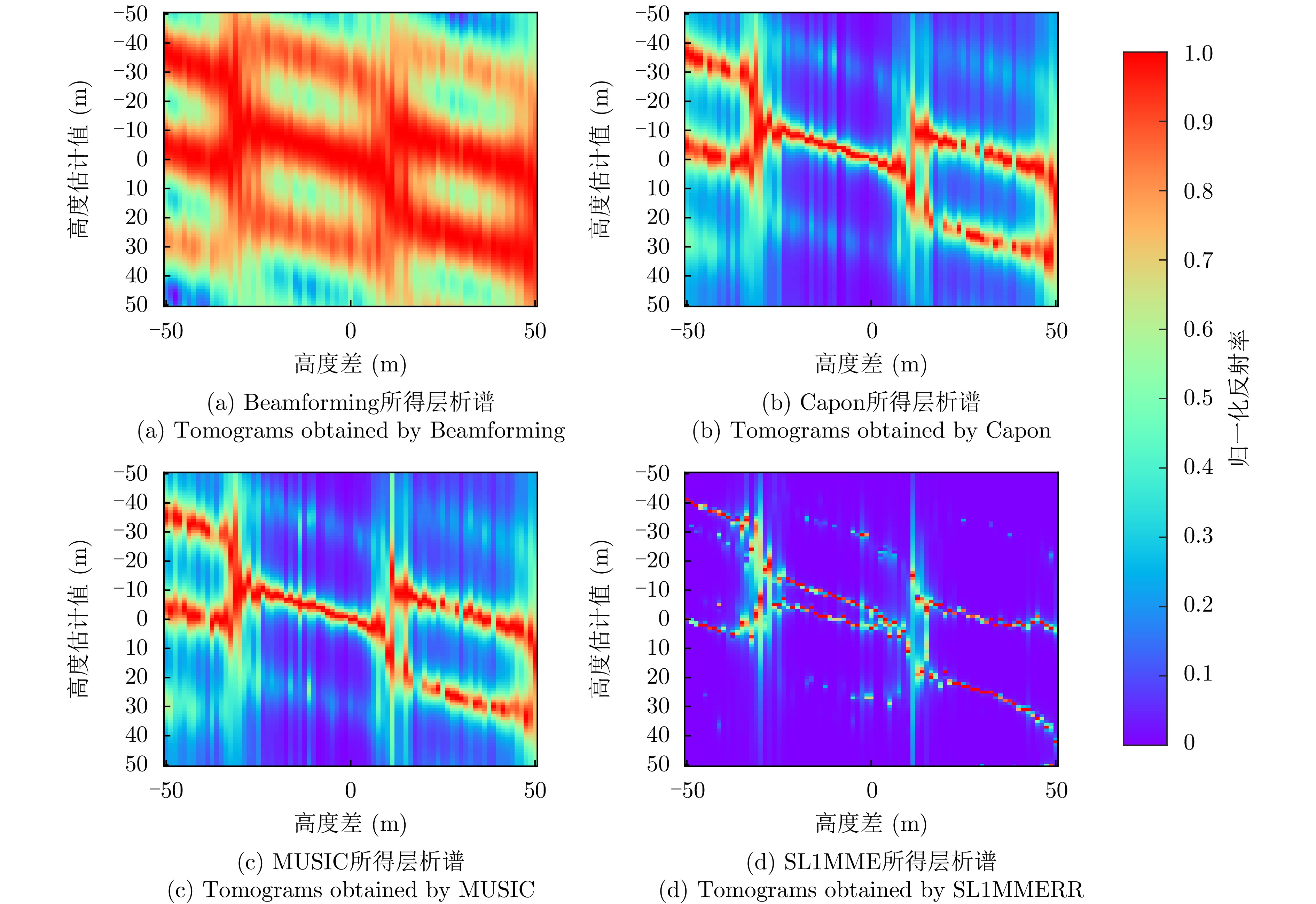
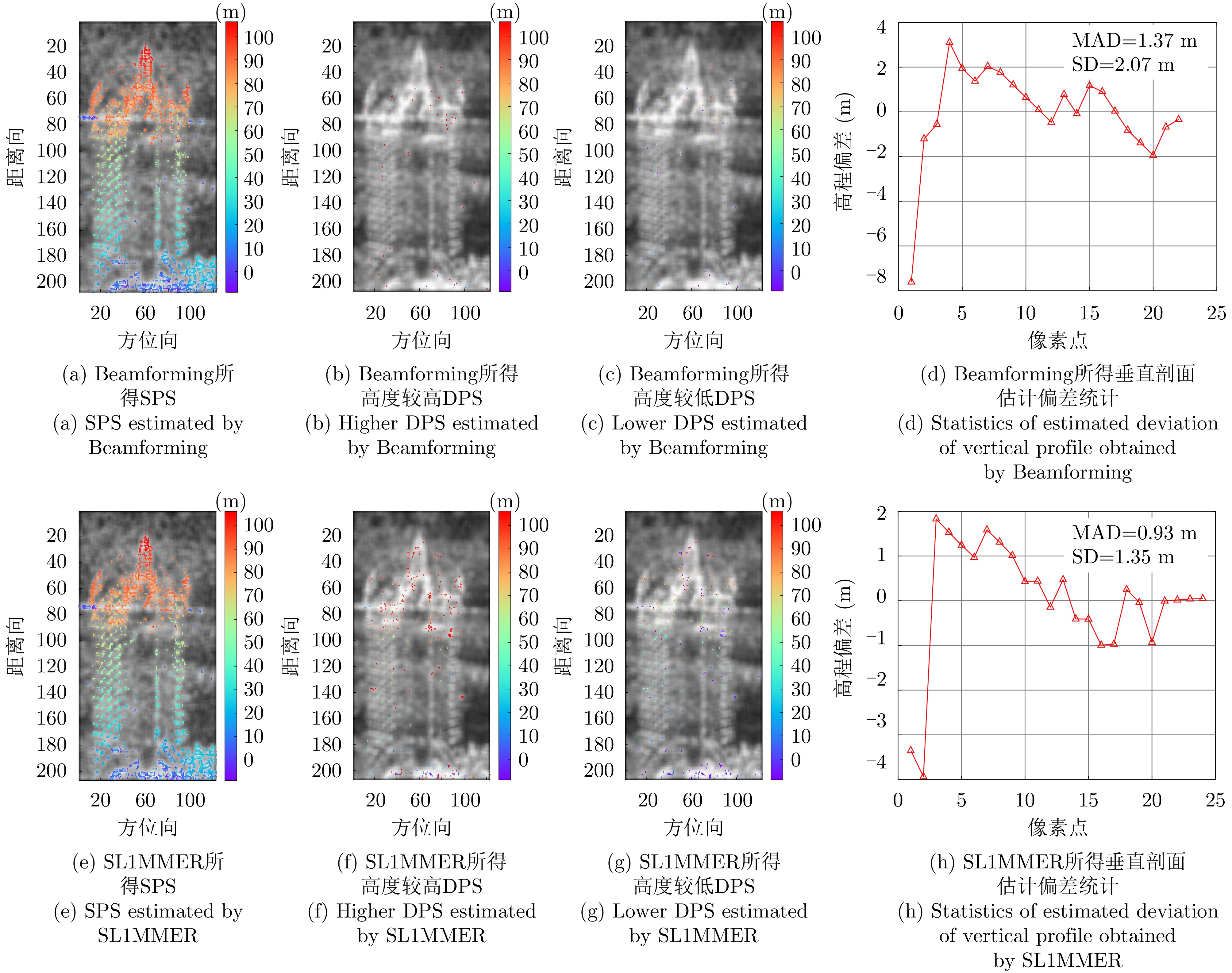
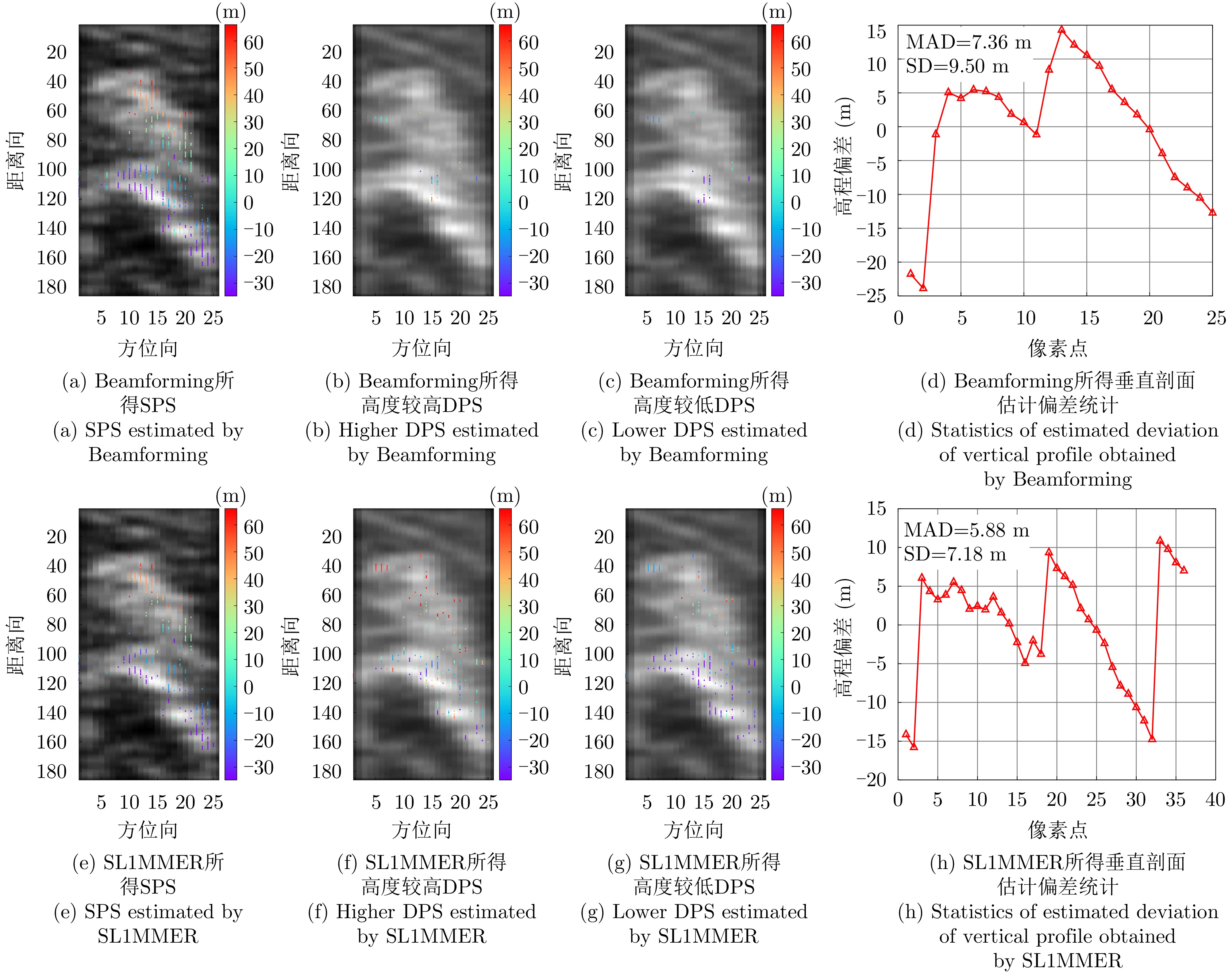
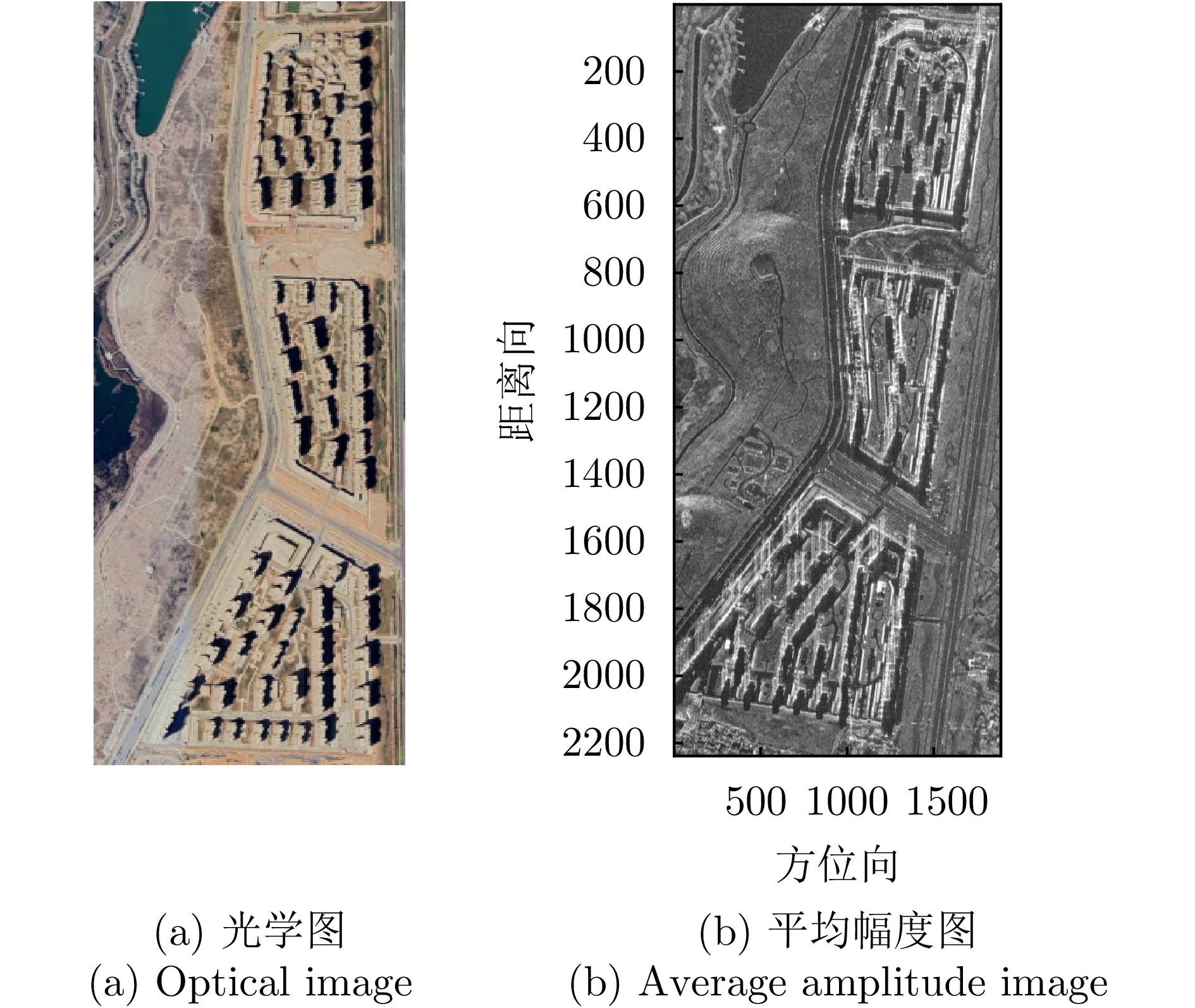
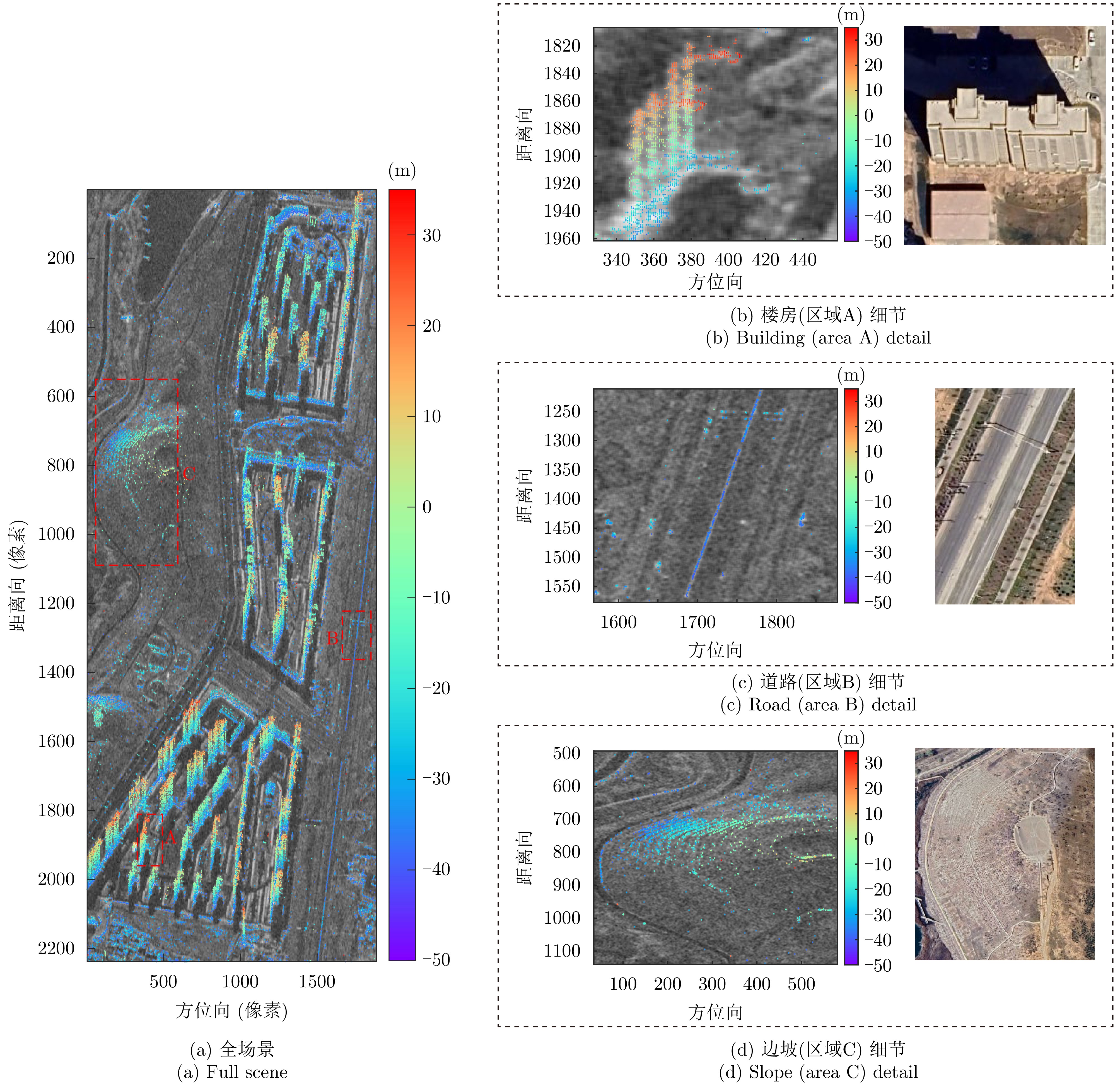
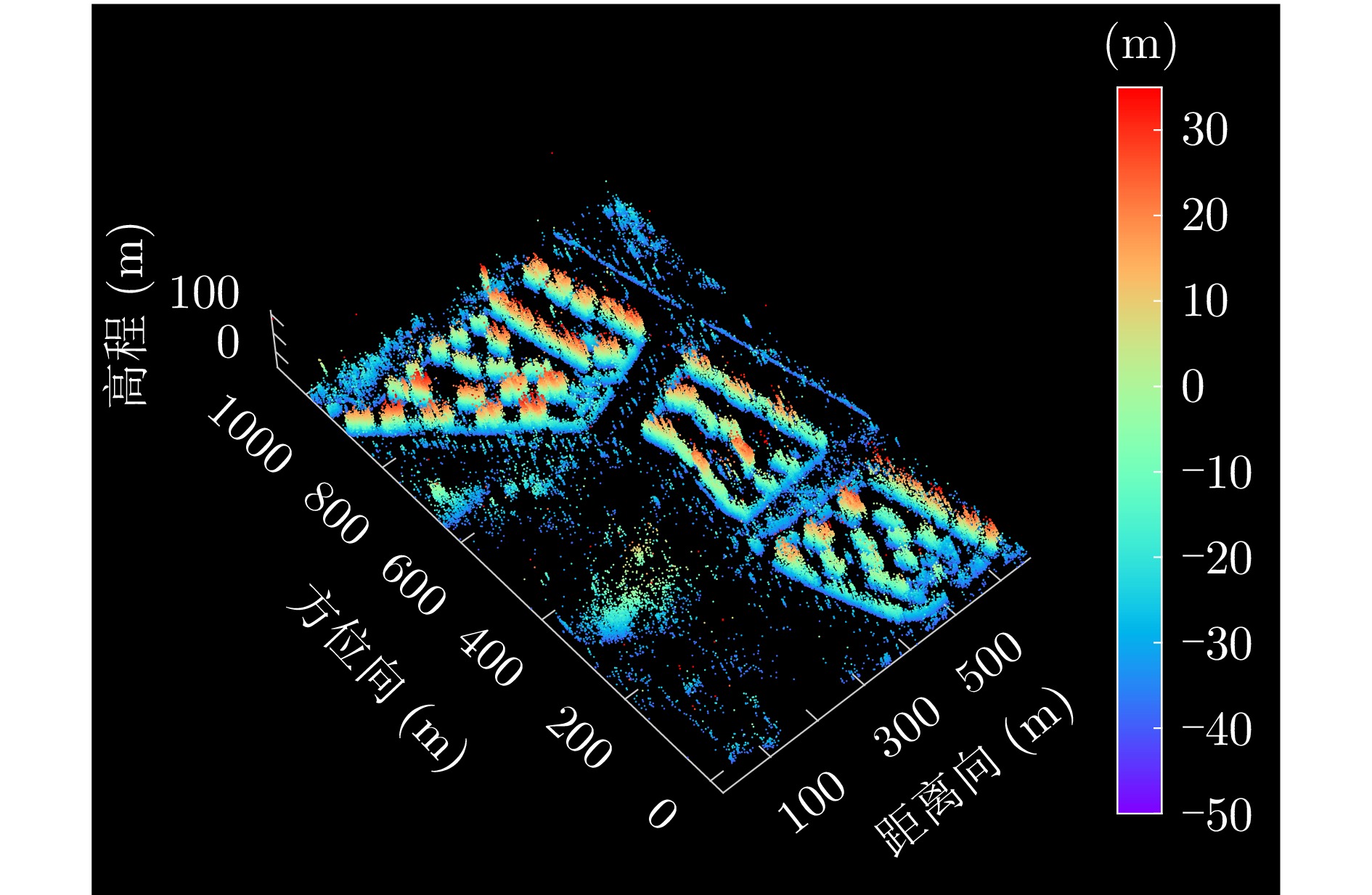
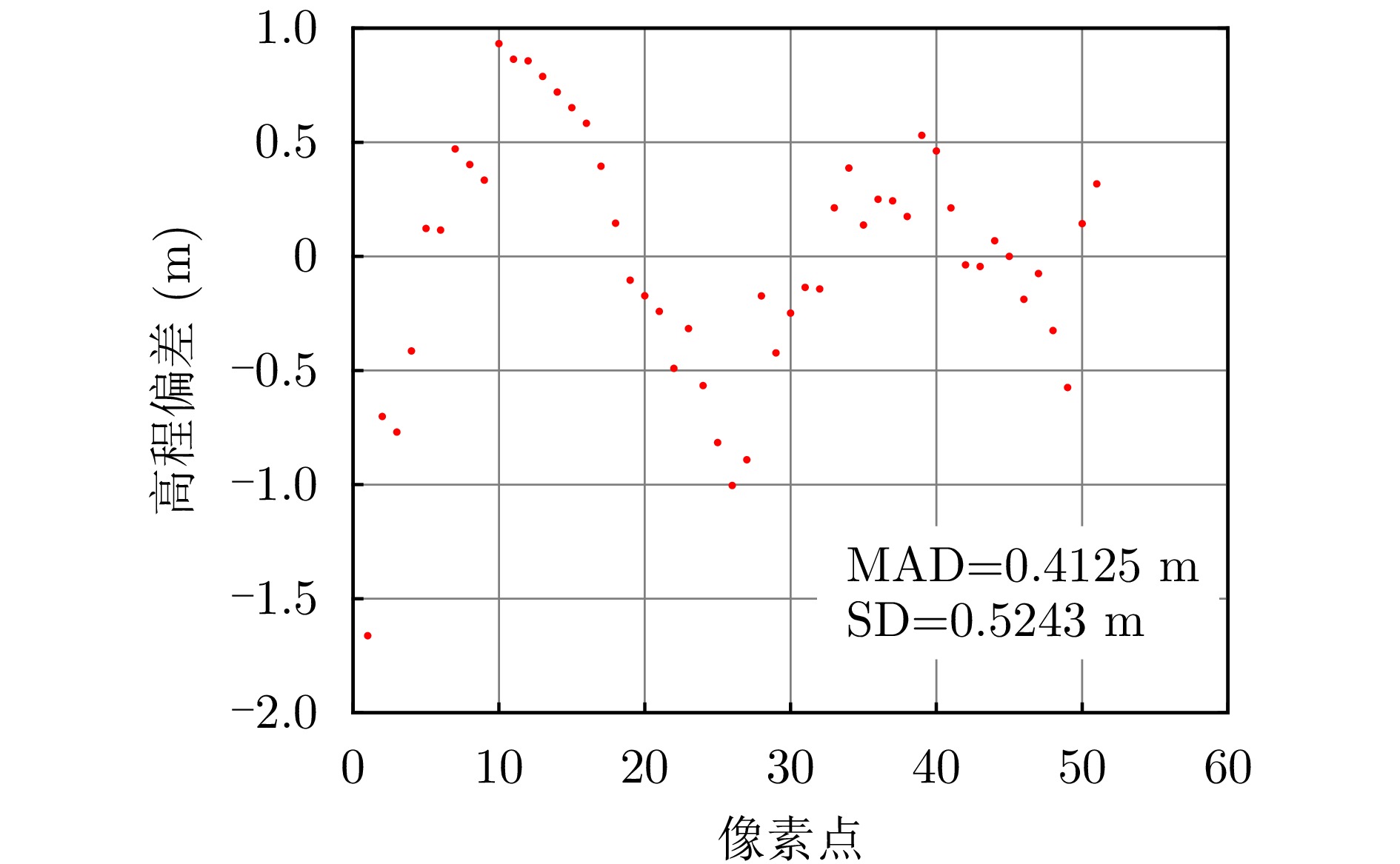
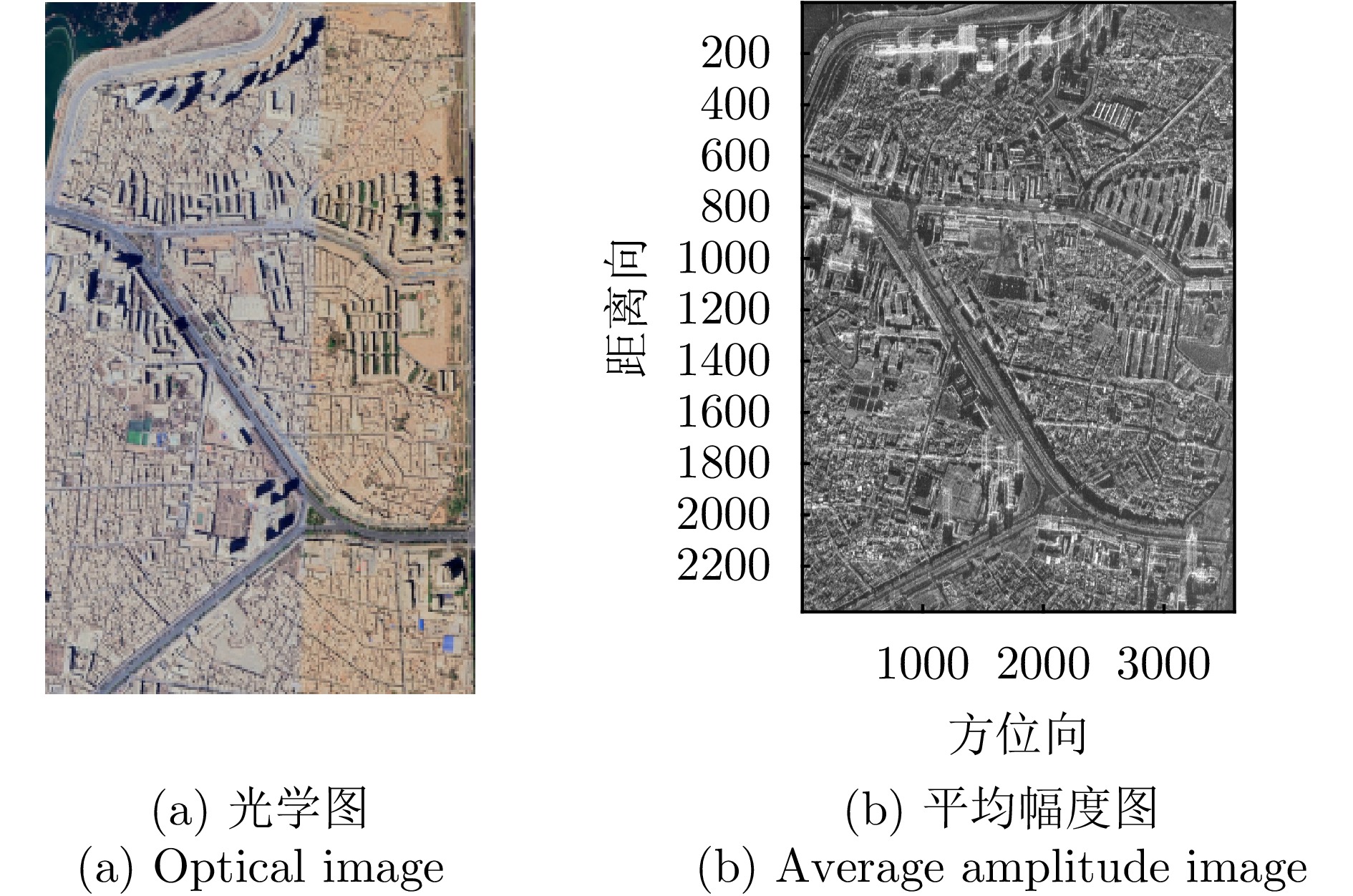
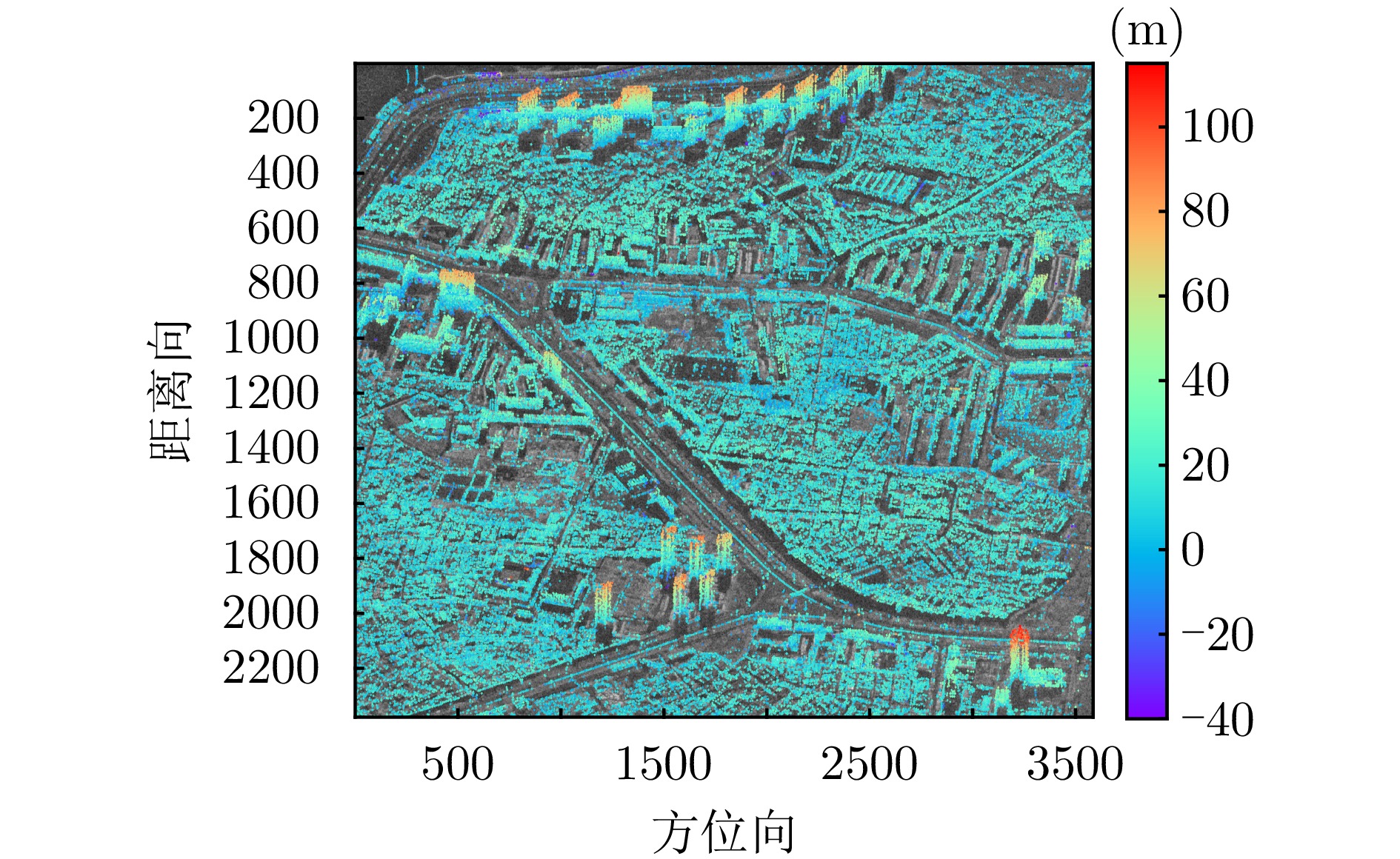
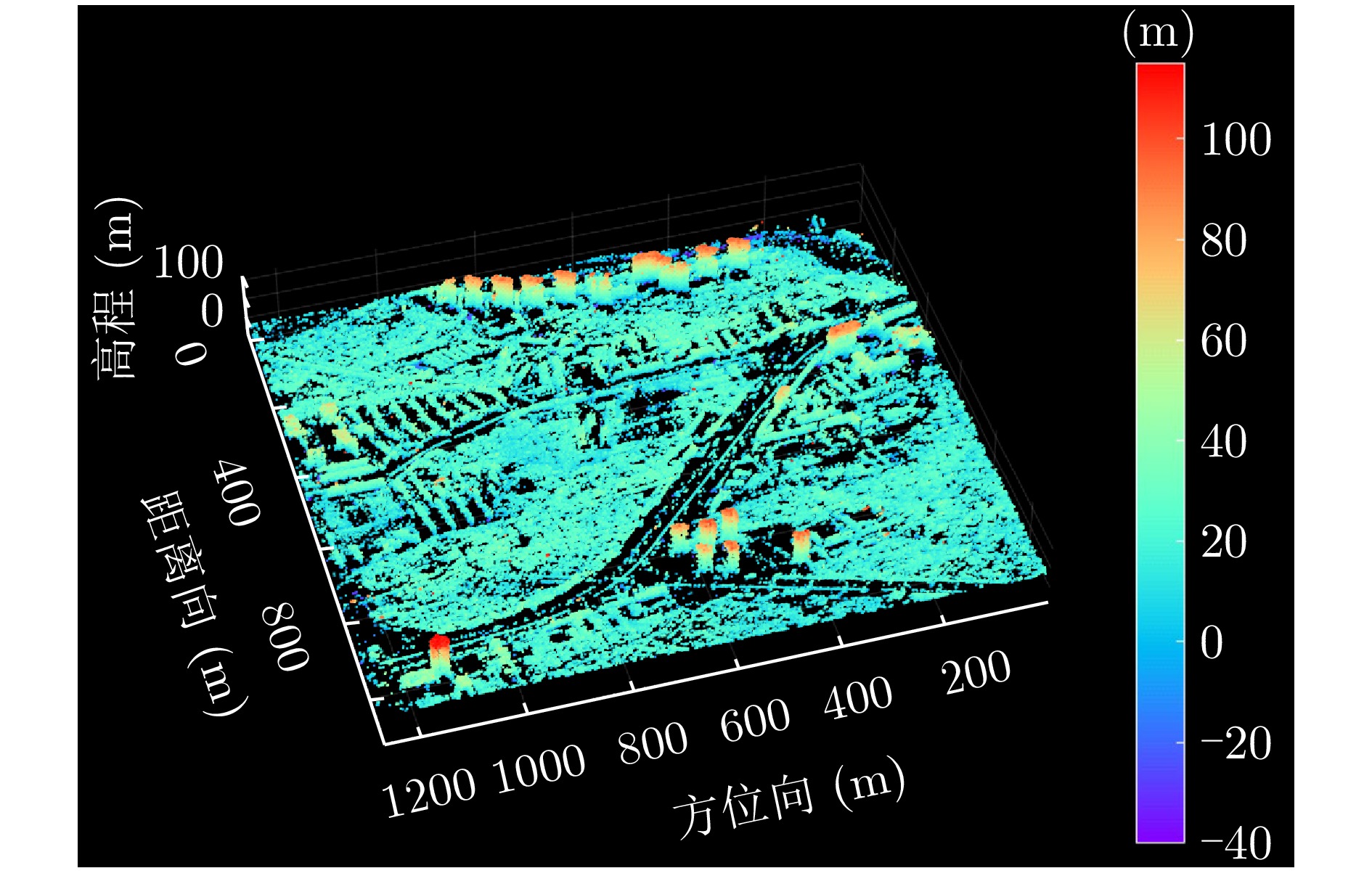
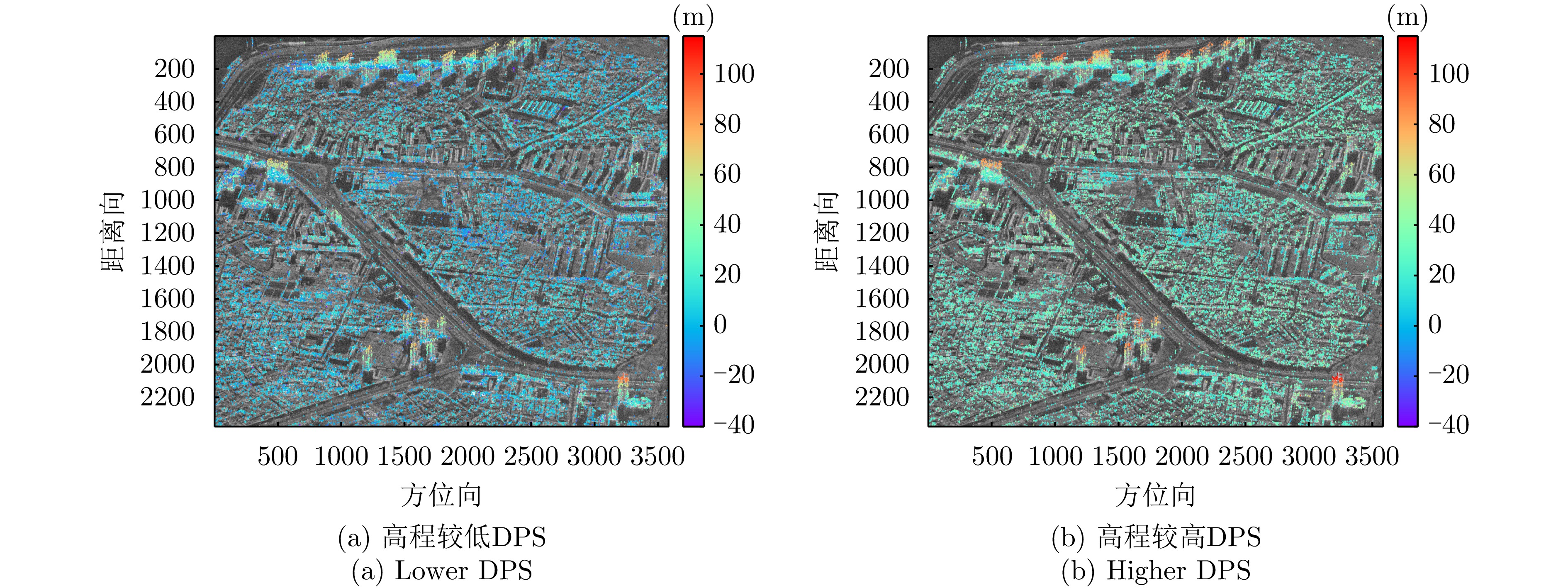
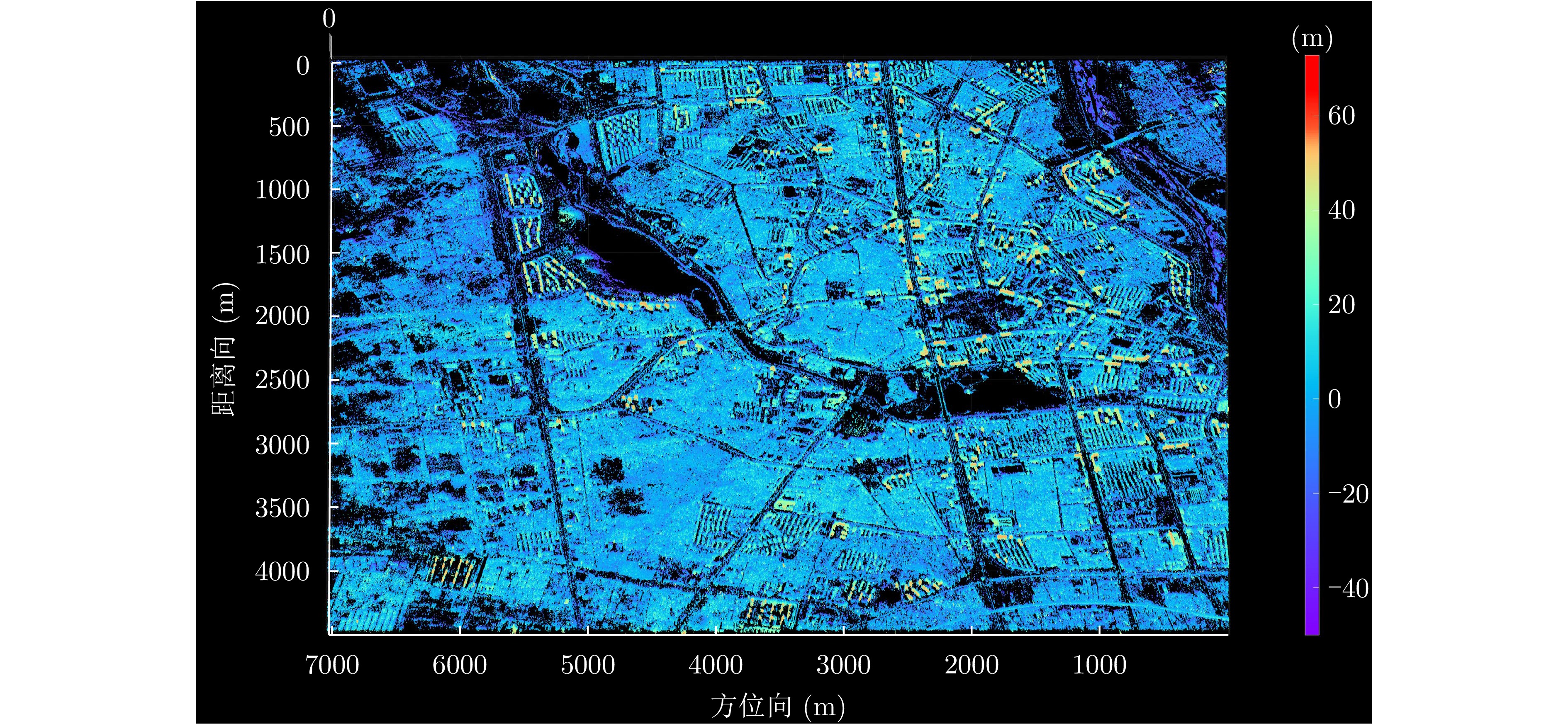
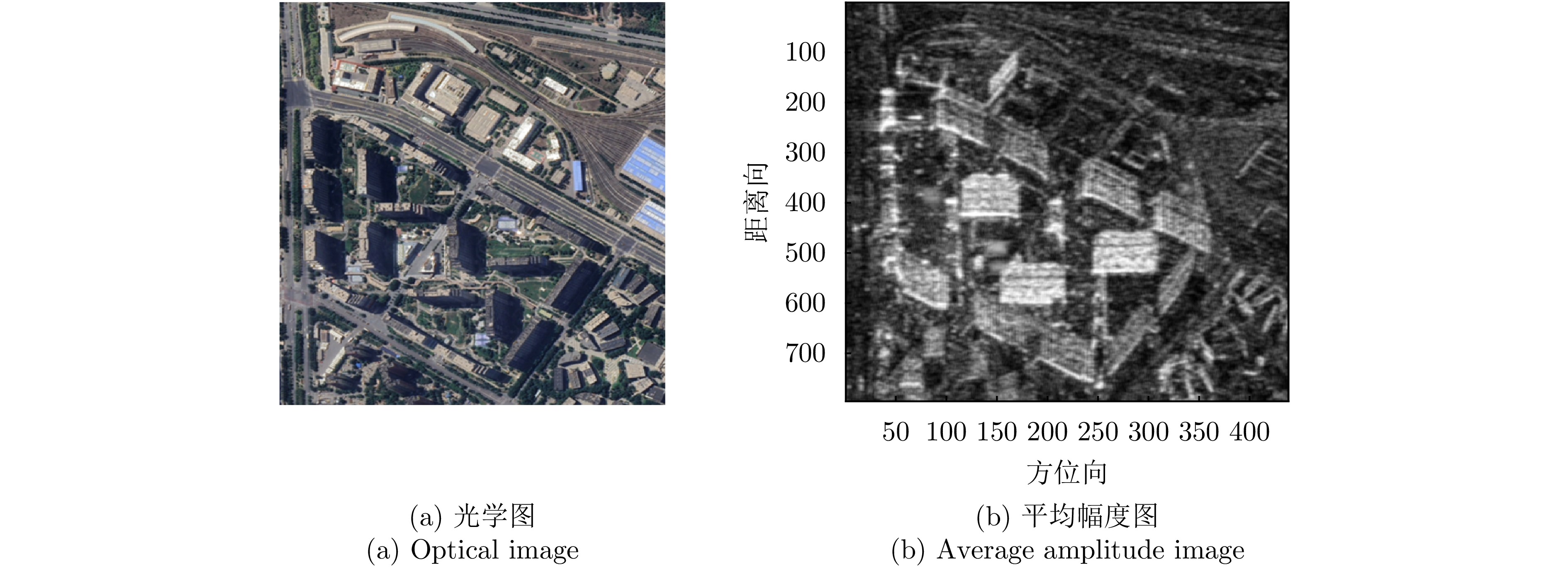
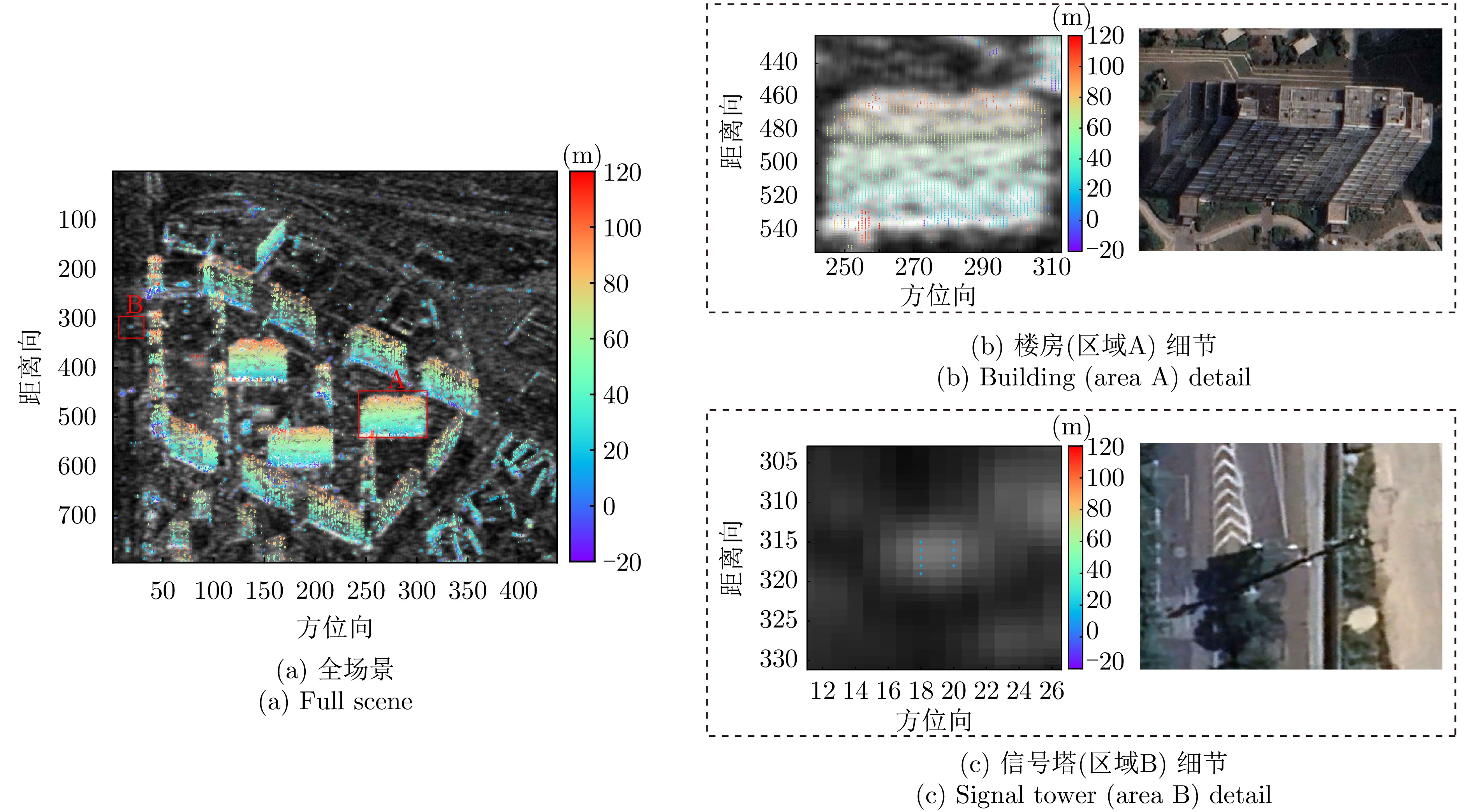
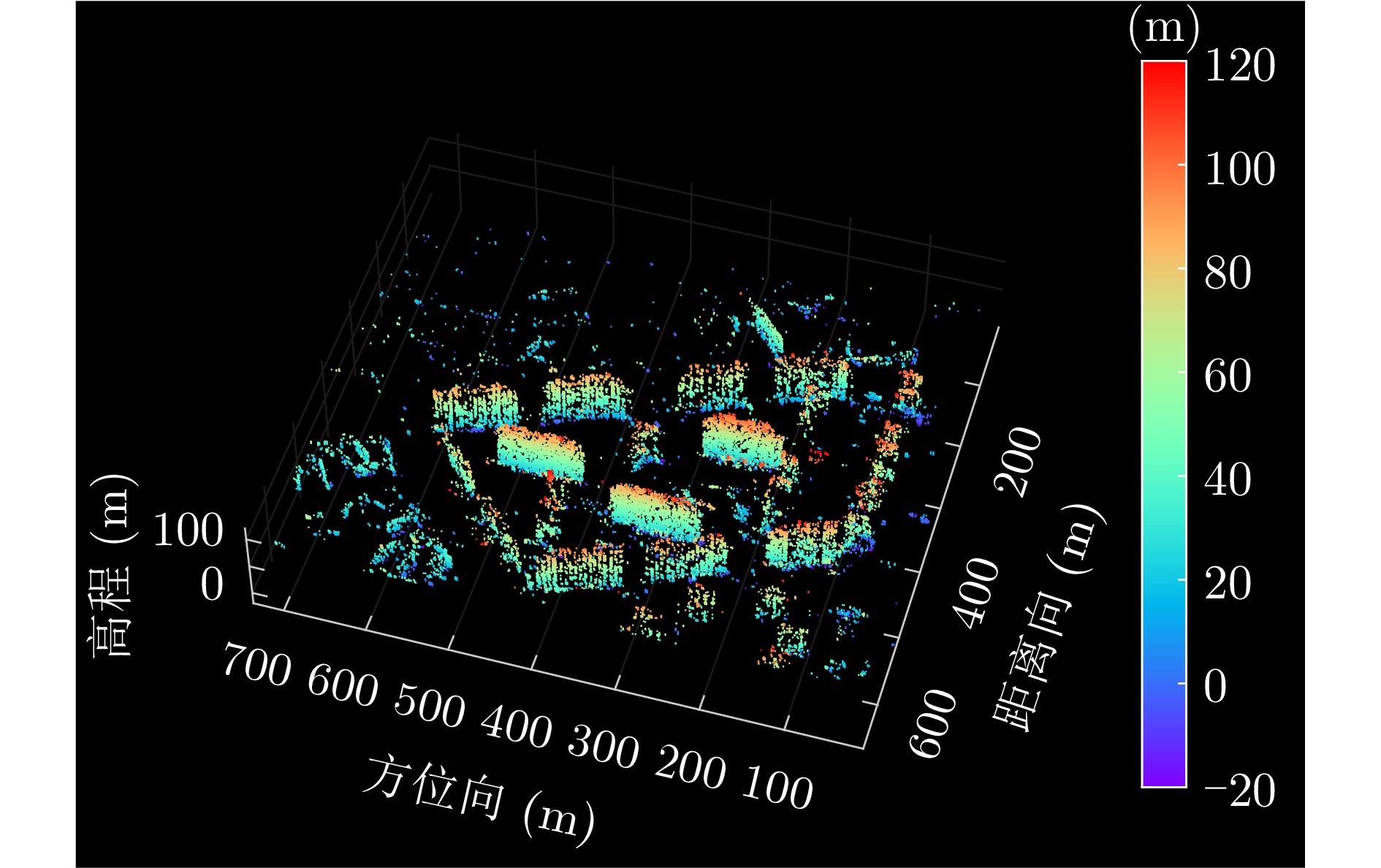
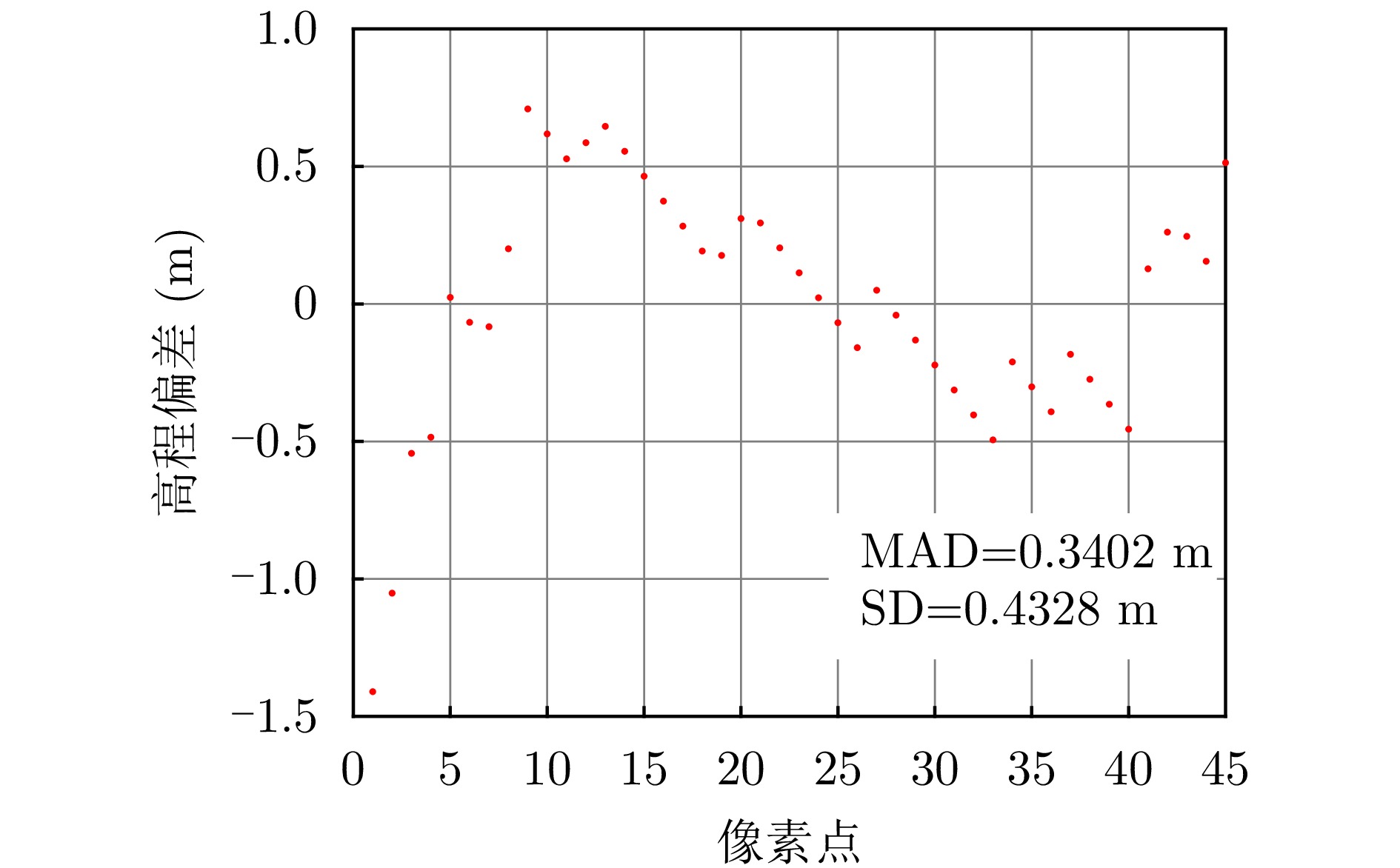
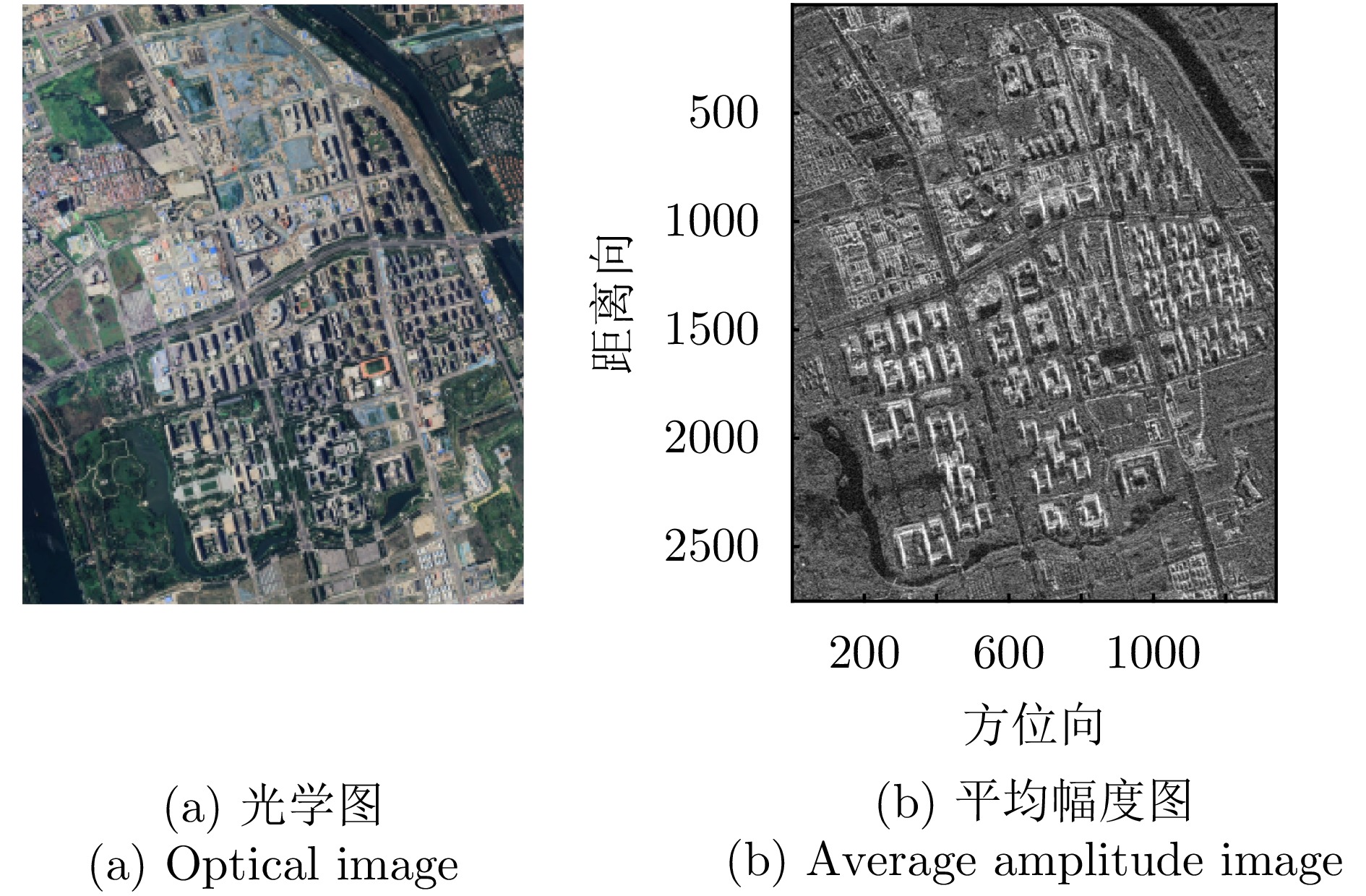
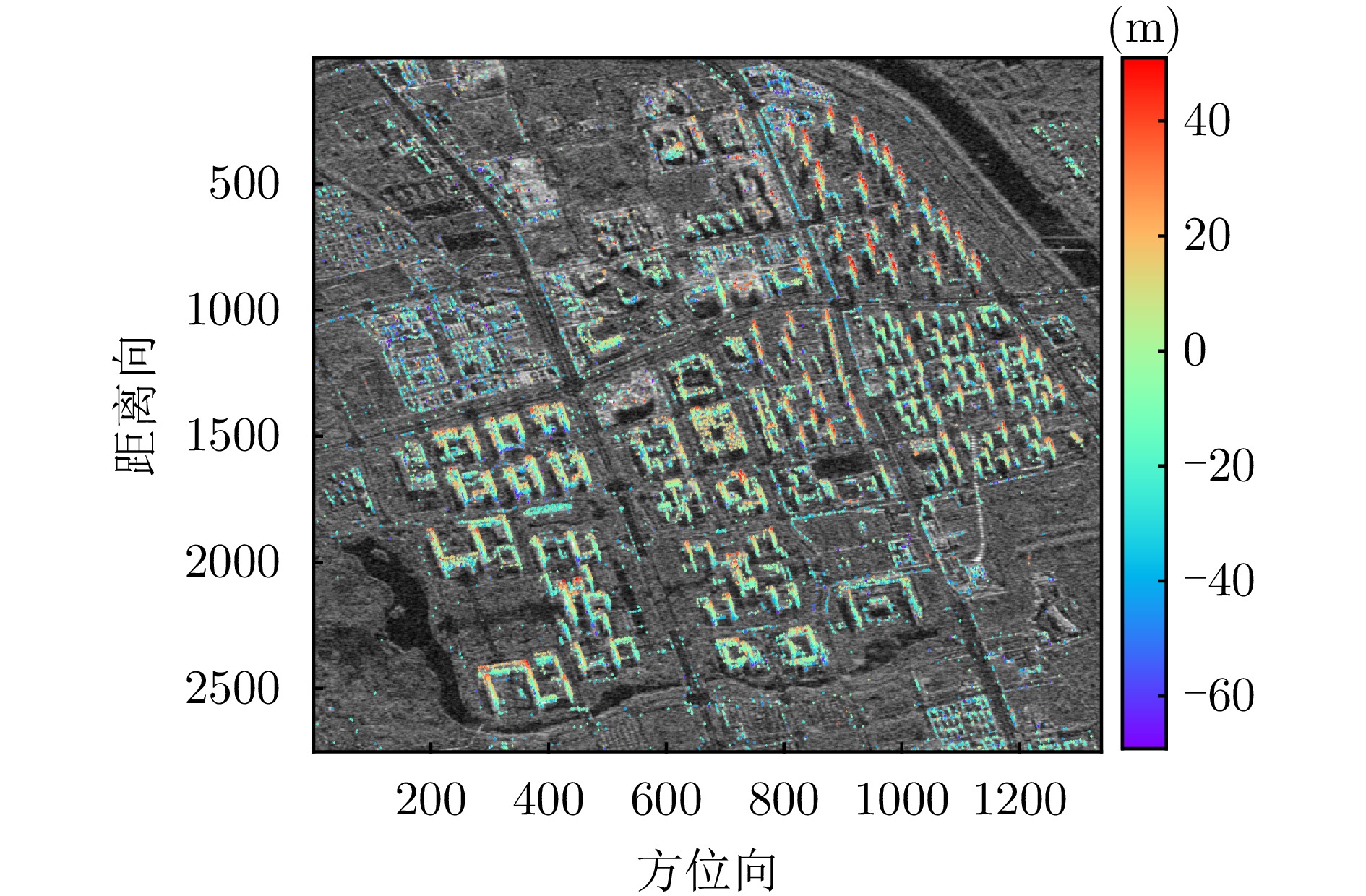
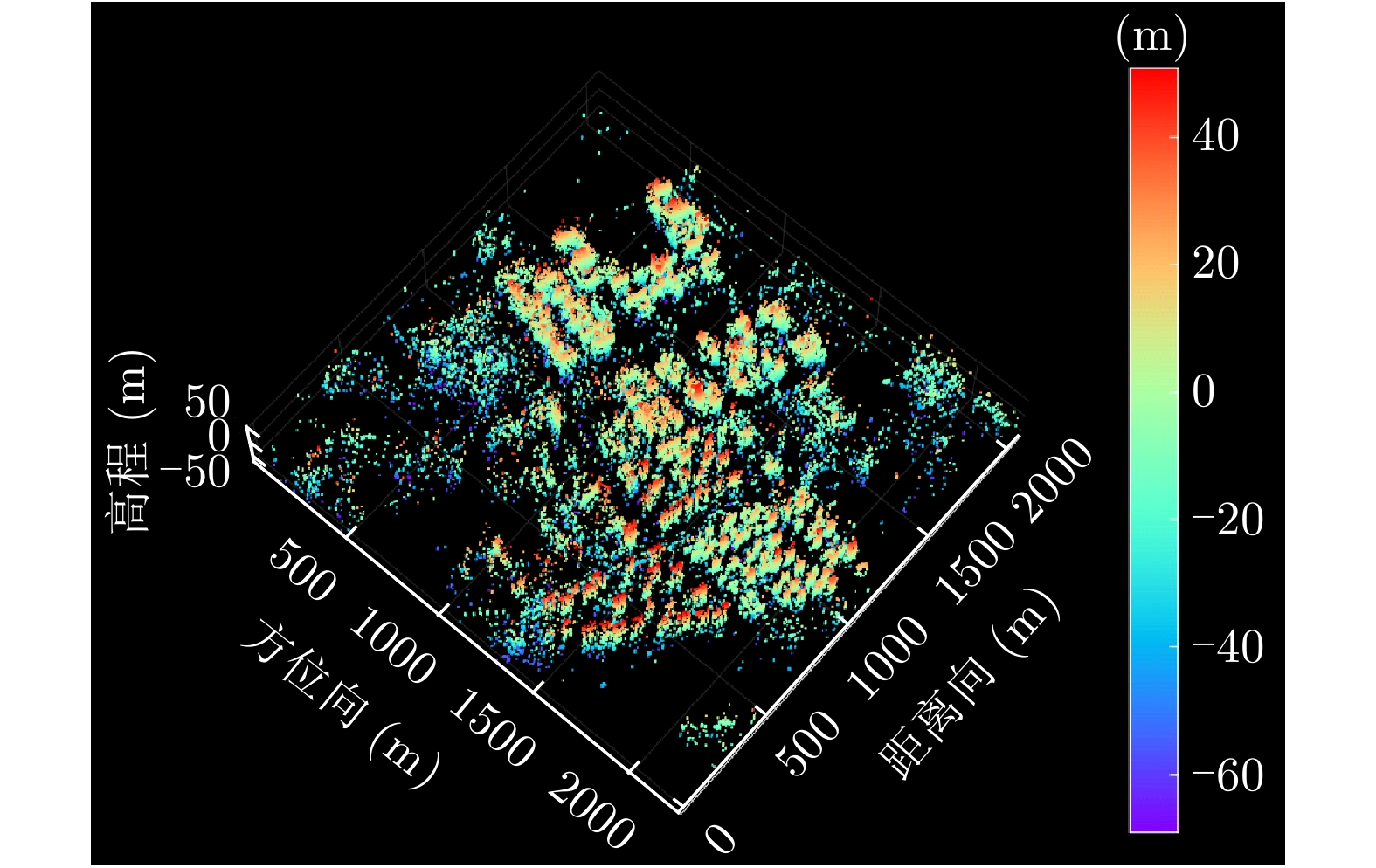
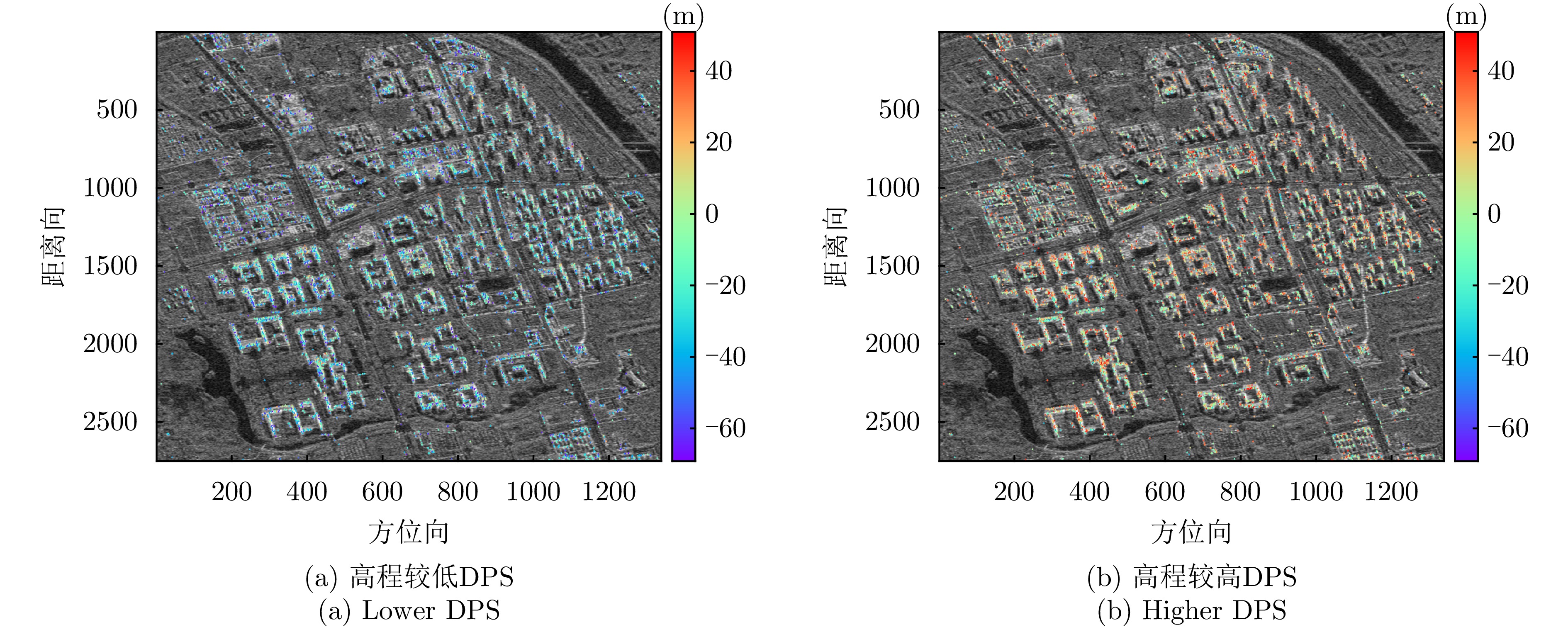
A single Synthetic Aperture Radar (SAR) image can capture only two-dimensional information, and traditional multitemporal Interferometric SAR (InSAR) techniques struggle with the layover problem, particularly in urban areas. SAR Tomography (TomoSAR) provides the advantage of obtaining three-dimensional (3-D) information while offering a feasible solution to the layover problem. This technique relies on repeated observations of the target scene to achieve 3-D resolution by synthesizing the aperture in the elevation direction. In China, early data sources for spaceborne TomoSAR primarily came from foreign satellites such as TerraSAR-X and COSMO-SkyMed, which constrained the development of the country’s TomoSAR technology. In recent years, the launch of Chinese commercial SAR satellites (e.g., Fucheng-1 and Hongtu-1) has expanded the range of data acquisition sources. However, studies on the tomographic 3-D inversion of urban buildings and structures using data from Chinese commercial SAR satellites remain limited. To validate the usability of Chinese commercial SAR satellite data in urban tomography 3-D parameter inversion and the effectiveness of applying these data to existing tomography imaging methods, this paper develops a 3-D inversion framework for urban TomoSAR and conducts a 3-D inversion study of urban buildings and structures using data from the Fucheng-1 satellite of Spacety Co., Ltd. (Changsha) and the Hongtu-1 SAR satellite of Piesat Information Technology Co., Ltd. The experimental results validate the potential of these two satellite systems for tomographic applications, providing pioneering technical support for future in-depth research and applications.
A single Synthetic Aperture Radar (SAR) image can capture only two-dimensional information, and traditional multitemporal Interferometric SAR (InSAR) techniques struggle with the layover problem, particularly in urban areas. SAR Tomography (TomoSAR) provides the advantage of obtaining three-dimensional (3-D) information while offering a feasible solution to the layover problem. This technique relies on repeated observations of the target scene to achieve 3-D resolution by synthesizing the aperture in the elevation direction. In China, early data sources for spaceborne TomoSAR primarily came from foreign satellites such as TerraSAR-X and COSMO-SkyMed, which constrained the development of the country’s TomoSAR technology. In recent years, the launch of Chinese commercial SAR satellites (e.g., Fucheng-1 and Hongtu-1) has expanded the range of data acquisition sources. However, studies on the tomographic 3-D inversion of urban buildings and structures using data from Chinese commercial SAR satellites remain limited. To validate the usability of Chinese commercial SAR satellite data in urban tomography 3-D parameter inversion and the effectiveness of applying these data to existing tomography imaging methods, this paper develops a 3-D inversion framework for urban TomoSAR and conducts a 3-D inversion study of urban buildings and structures using data from the Fucheng-1 satellite of Spacety Co., Ltd. (Changsha) and the Hongtu-1 SAR satellite of Piesat Information Technology Co., Ltd. The experimental results validate the potential of these two satellite systems for tomographic applications, providing pioneering technical support for future in-depth research and applications.


2026,
15(2):
746-758.
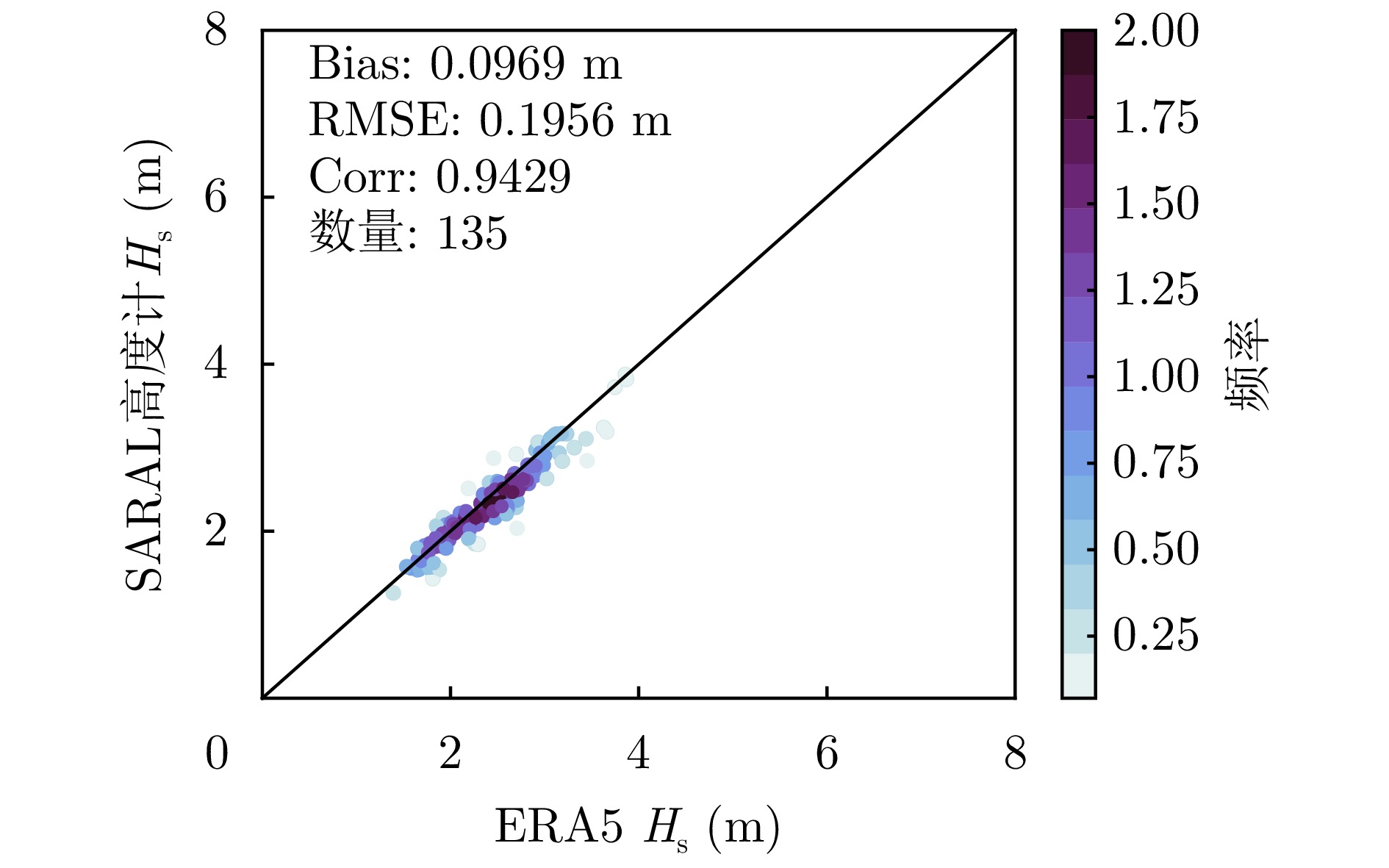
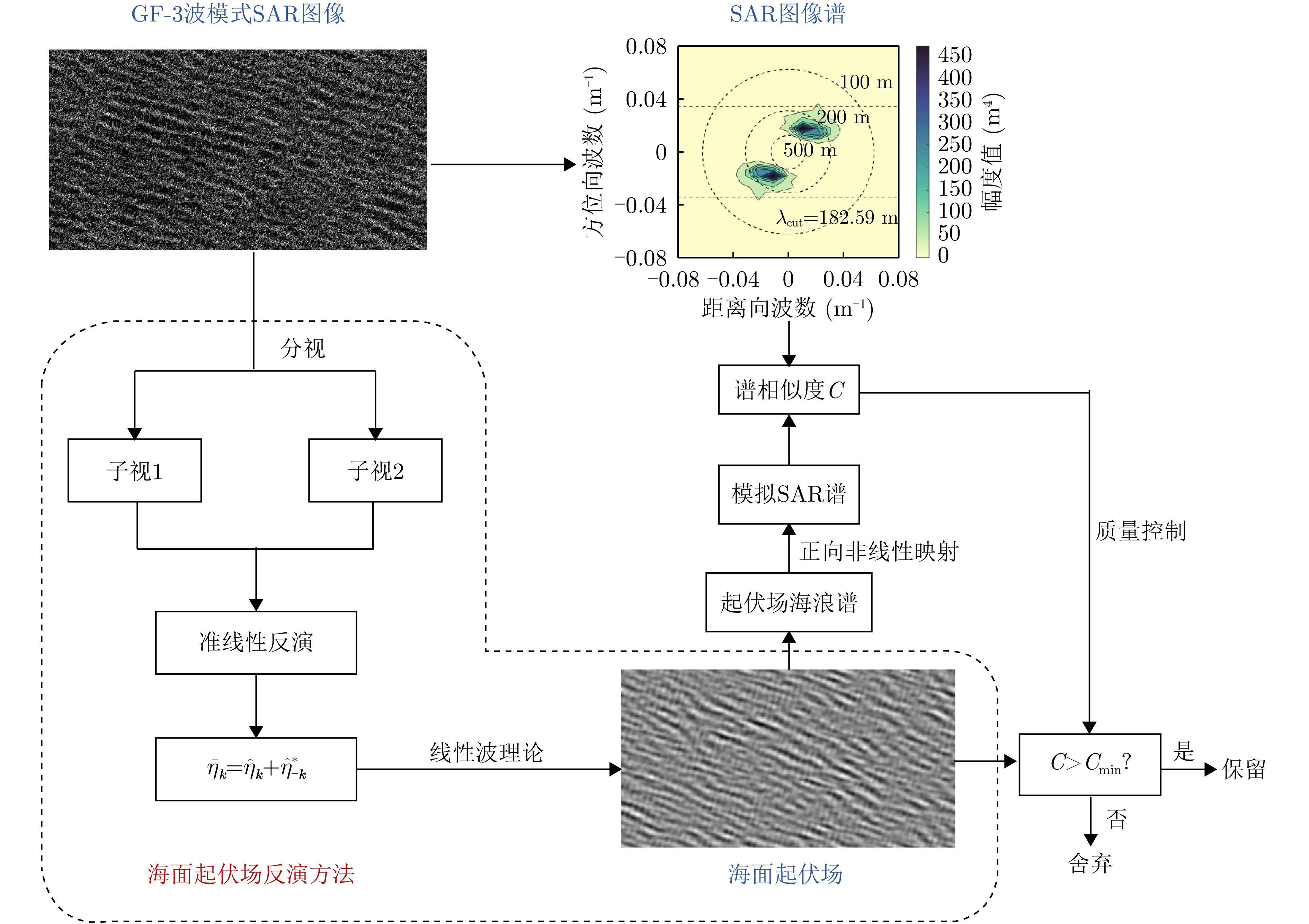
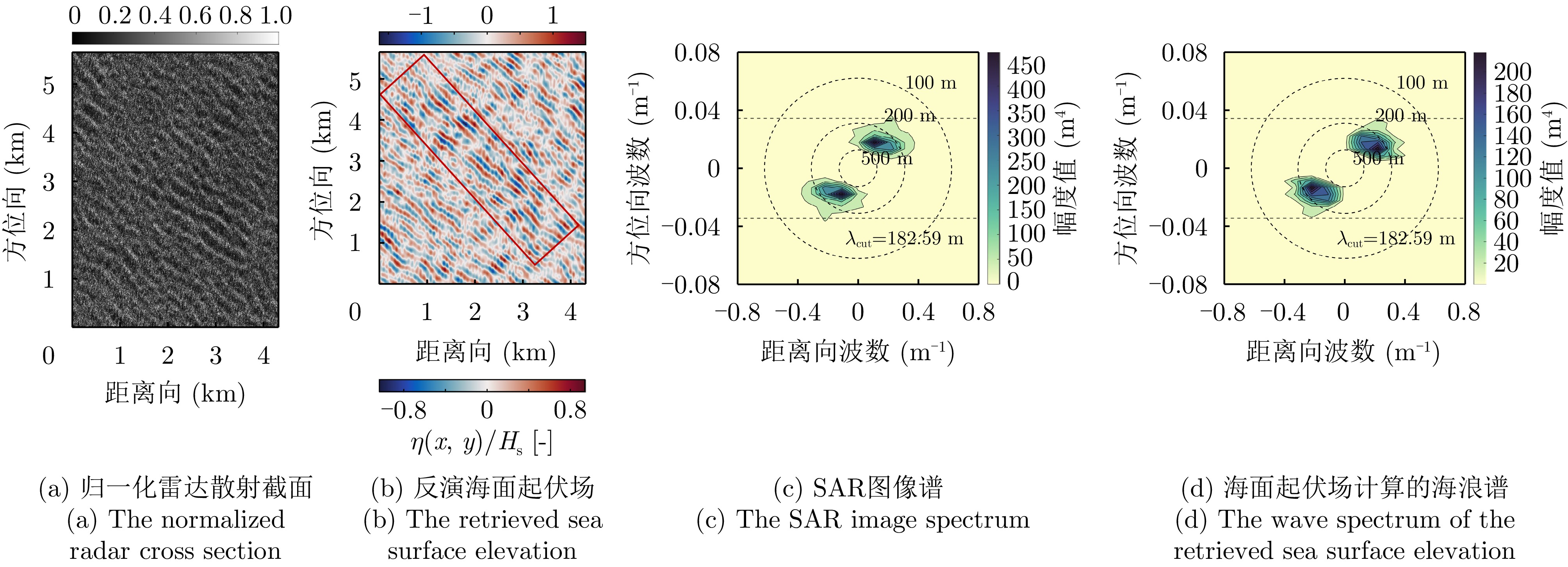
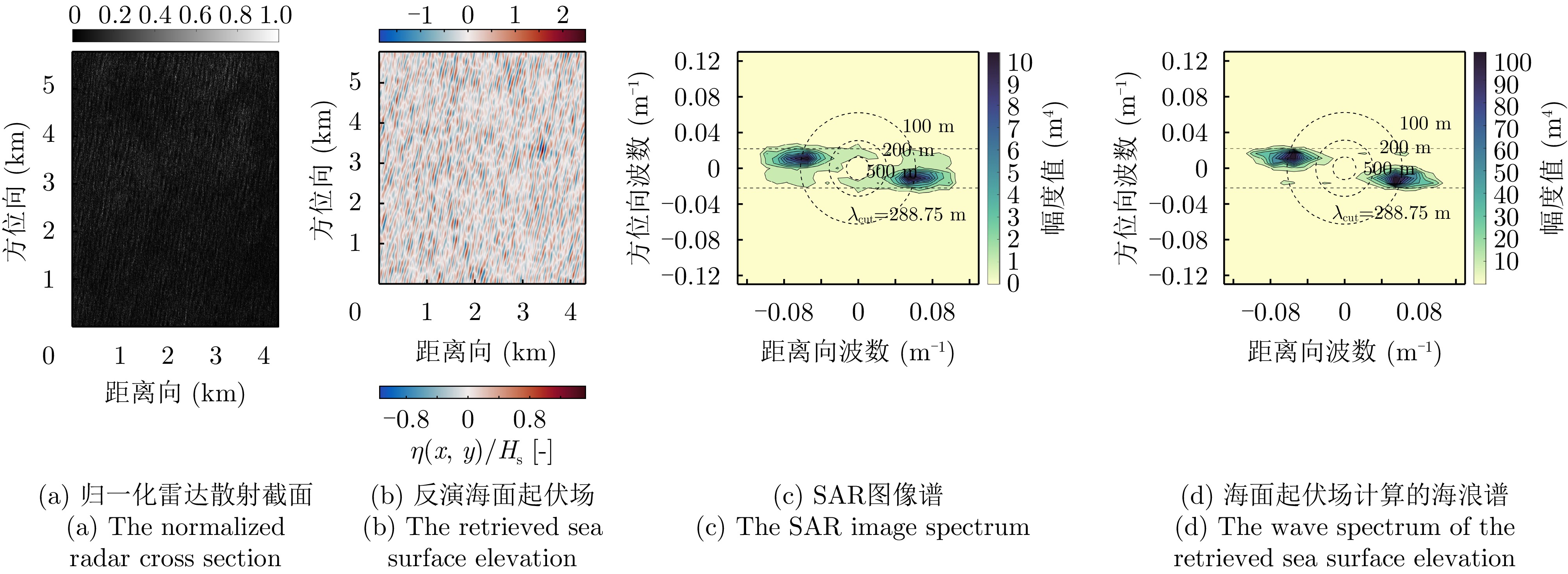
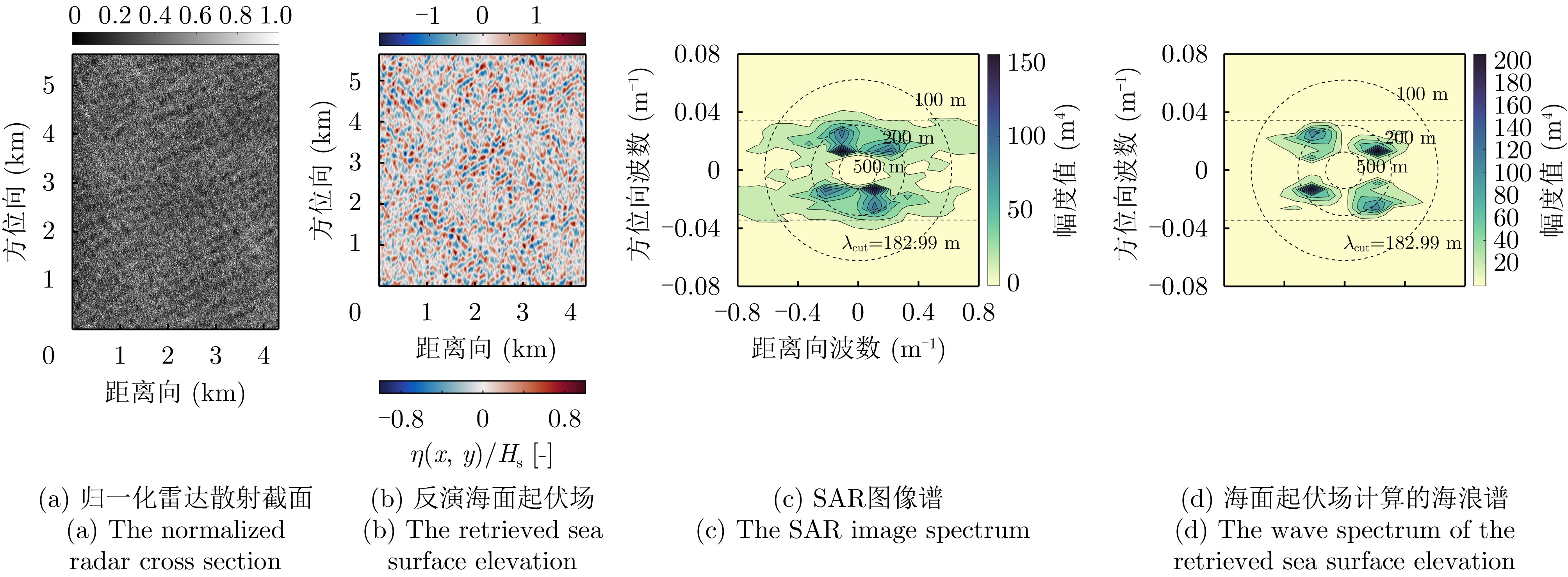
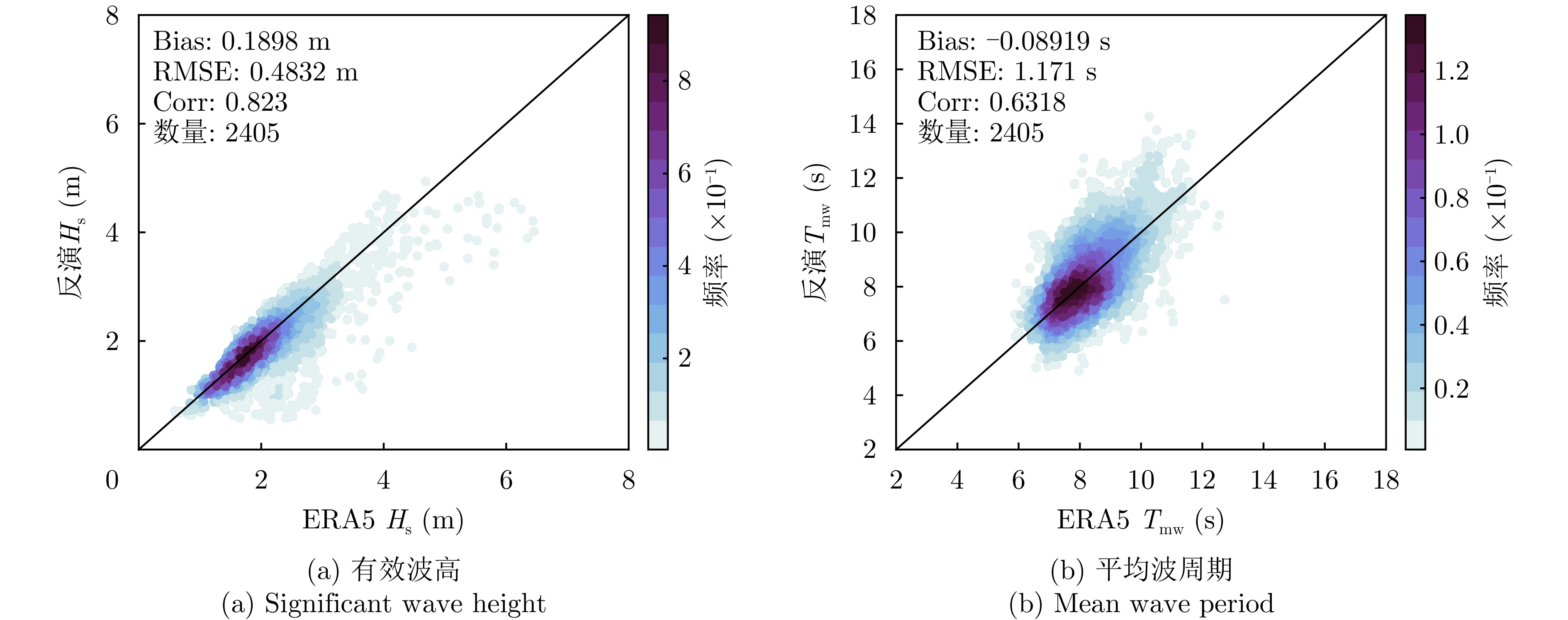
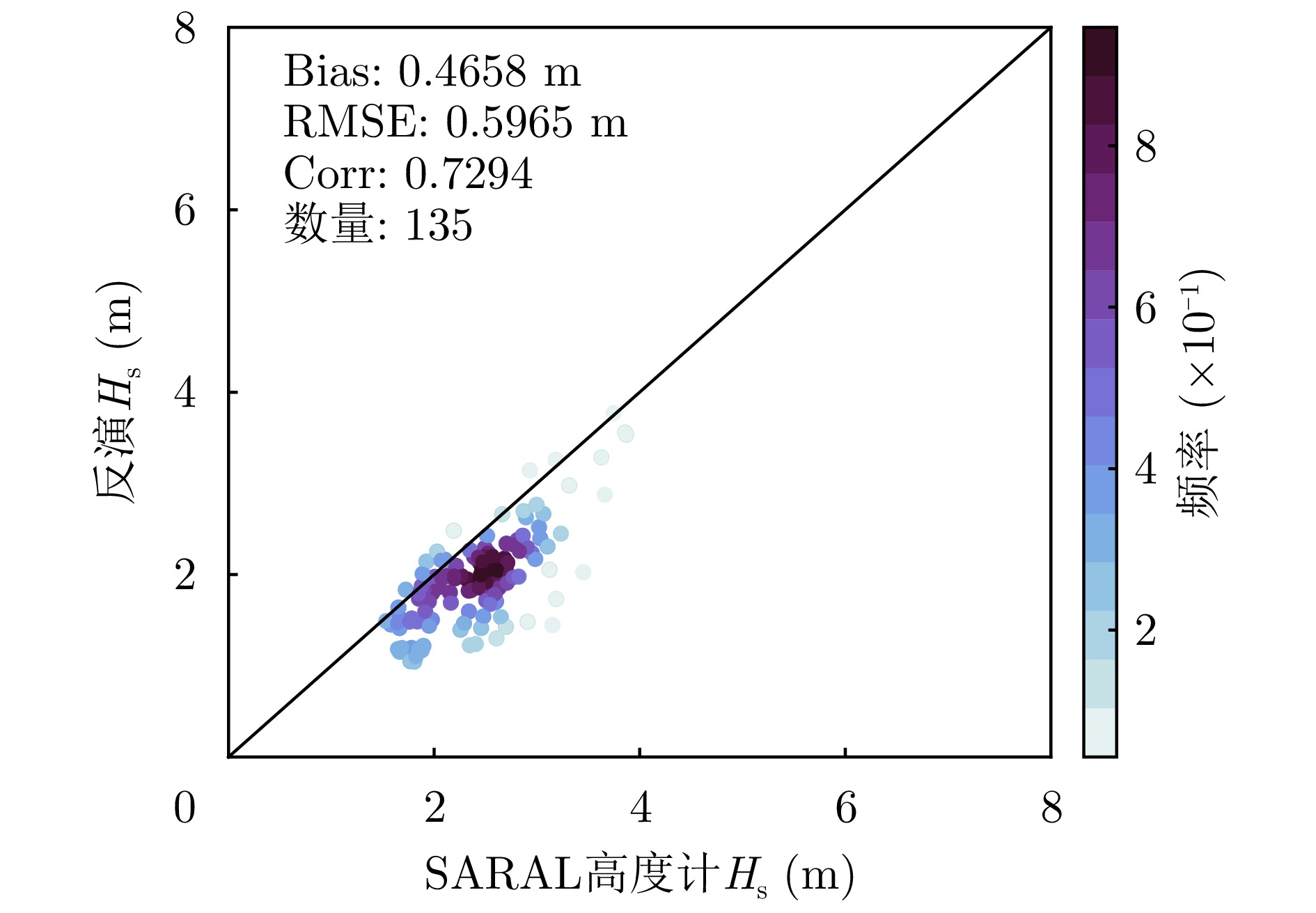
Sea surface elevation is crucial for characterizing individual waves, wave groups, and freak waves, offering an accurate representation of inhomogeneous sea states. This study presents a quasi-linear inversion strategy for retrieving sea surface elevation from GF-3 Synthetic Aperture Radar (SAR) images. The algorithm enables rapid inversion within 10 s per scene without the need for external data and effectively resolves range-traveling waves. Case studies conducted under three distinct sea states demonstrate its ability to extract maximum wave heights and identify wave groups. Additionally, inversion results from 2405 GF-3 wave mode SAR images following quality control are compared with ERA5 reanalysis spectra and altimeter data. The comparisons reveal that the retrieved Significant Wave Height (SWH) has a root mean square error of 0.48 m compared with ERA5 data. In low-to-moderate sea states, with significant wave heights below 3 m, the retrieved SWH shows strong consistency with ERA5 spectra and altimeter measurements. This algorithm serves as an effective tool for rapid monitoring and analysis of sea states using GF-3 SAR.
Sea surface elevation is crucial for characterizing individual waves, wave groups, and freak waves, offering an accurate representation of inhomogeneous sea states. This study presents a quasi-linear inversion strategy for retrieving sea surface elevation from GF-3 Synthetic Aperture Radar (SAR) images. The algorithm enables rapid inversion within 10 s per scene without the need for external data and effectively resolves range-traveling waves. Case studies conducted under three distinct sea states demonstrate its ability to extract maximum wave heights and identify wave groups. Additionally, inversion results from 2405 GF-3 wave mode SAR images following quality control are compared with ERA5 reanalysis spectra and altimeter data. The comparisons reveal that the retrieved Significant Wave Height (SWH) has a root mean square error of 0.48 m compared with ERA5 data. In low-to-moderate sea states, with significant wave heights below 3 m, the retrieved SWH shows strong consistency with ERA5 spectra and altimeter measurements. This algorithm serves as an effective tool for rapid monitoring and analysis of sea states using GF-3 SAR.
2026,
15(2):
759-778.
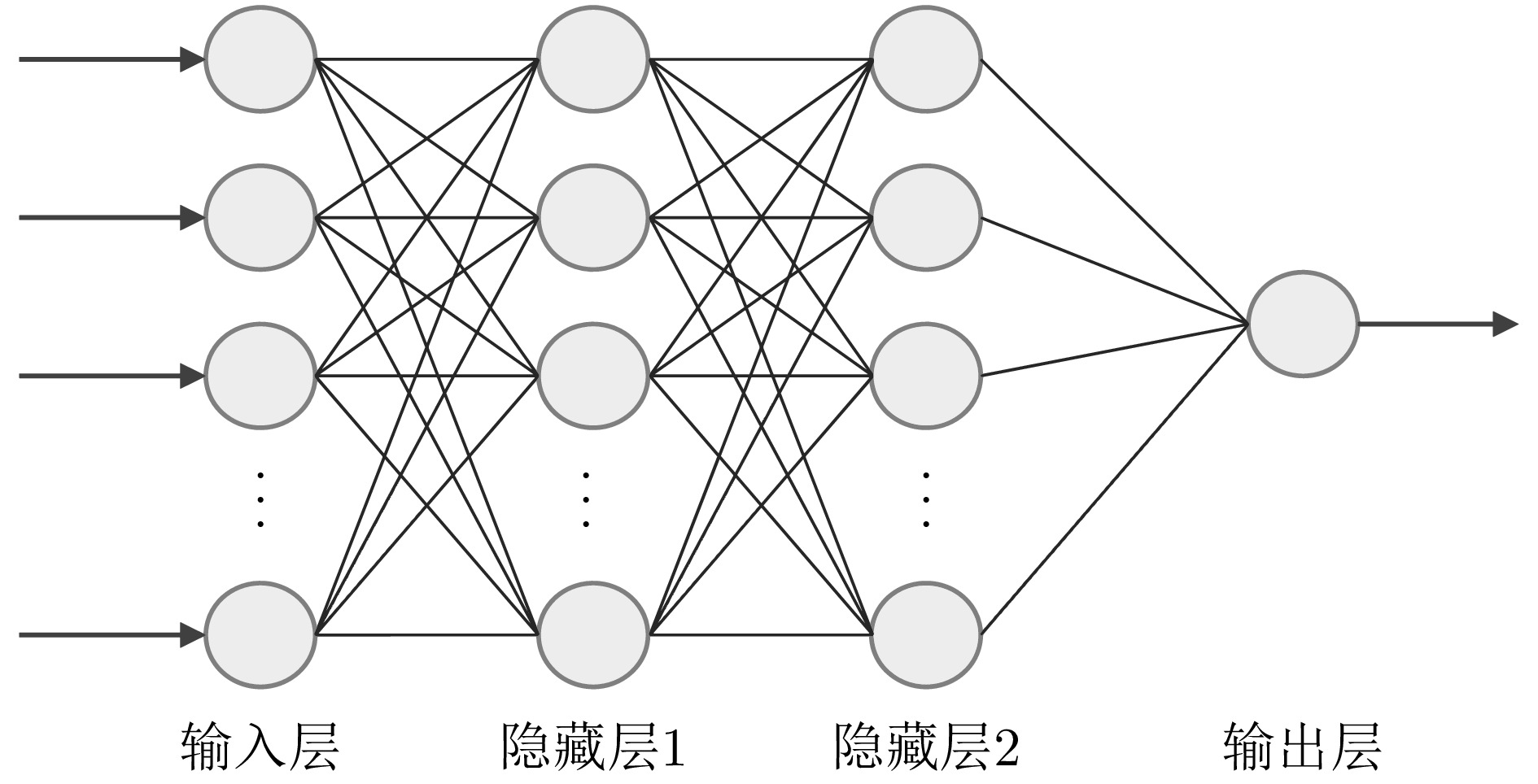
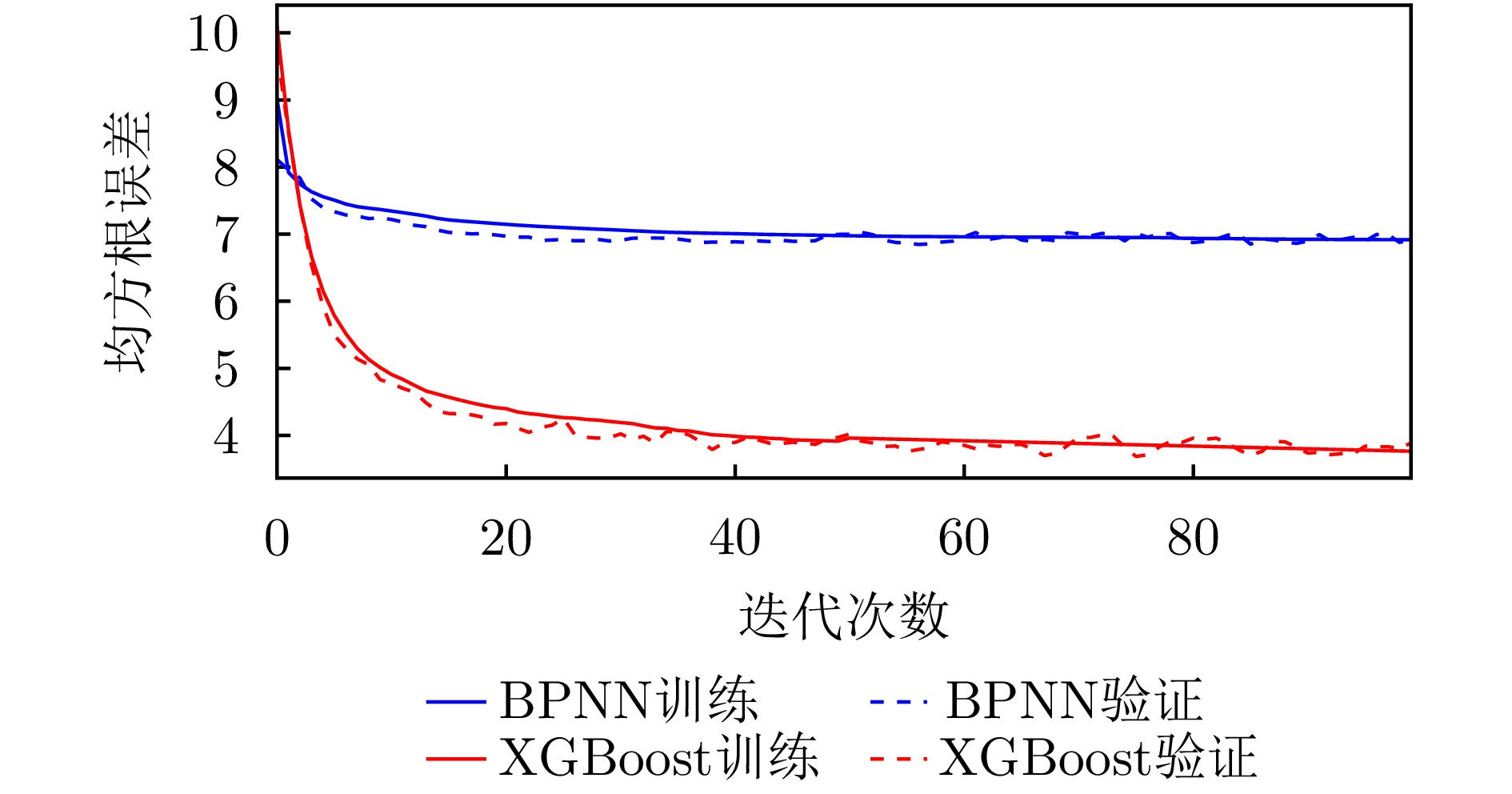
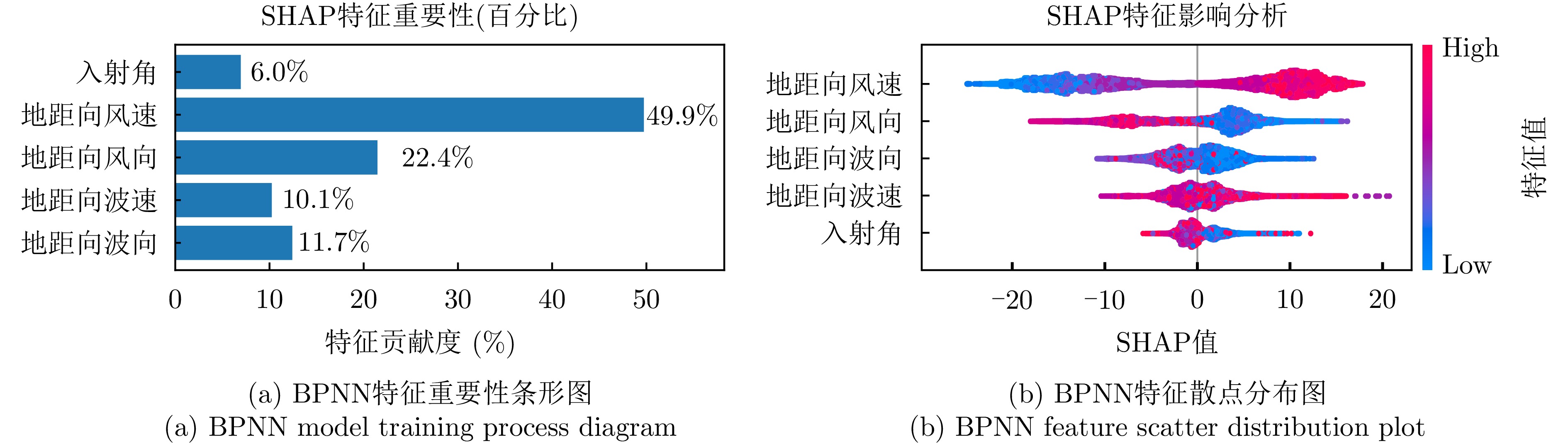
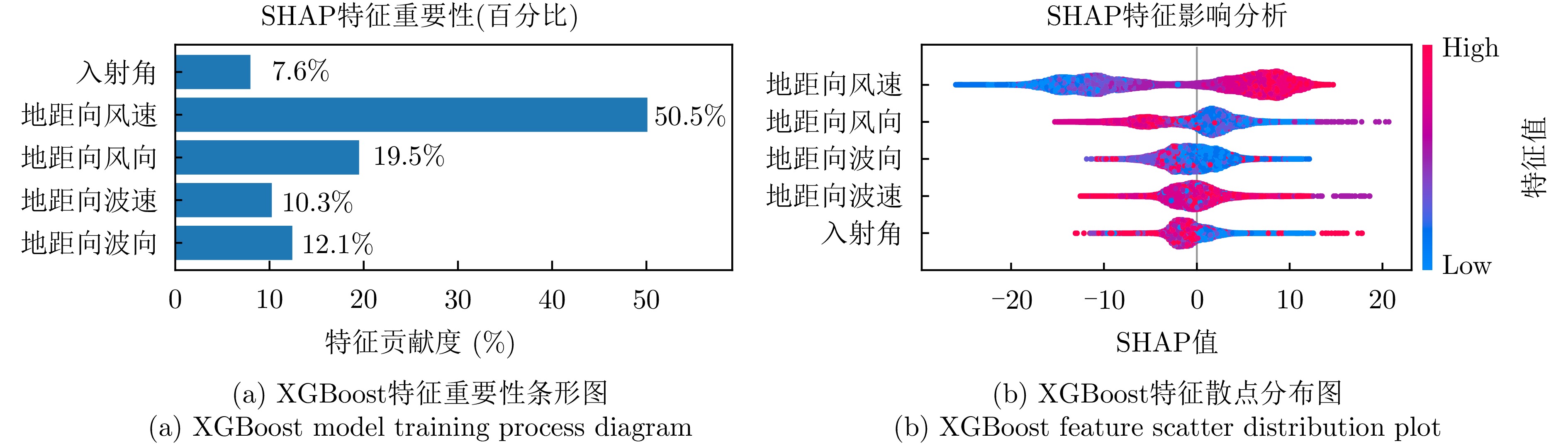
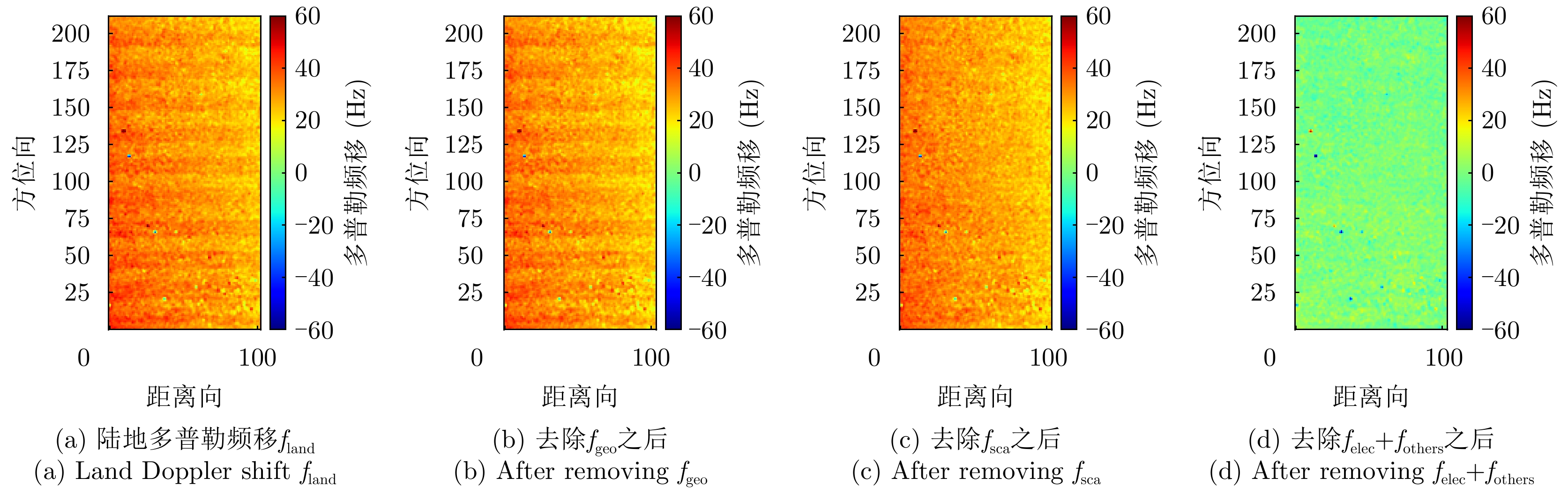
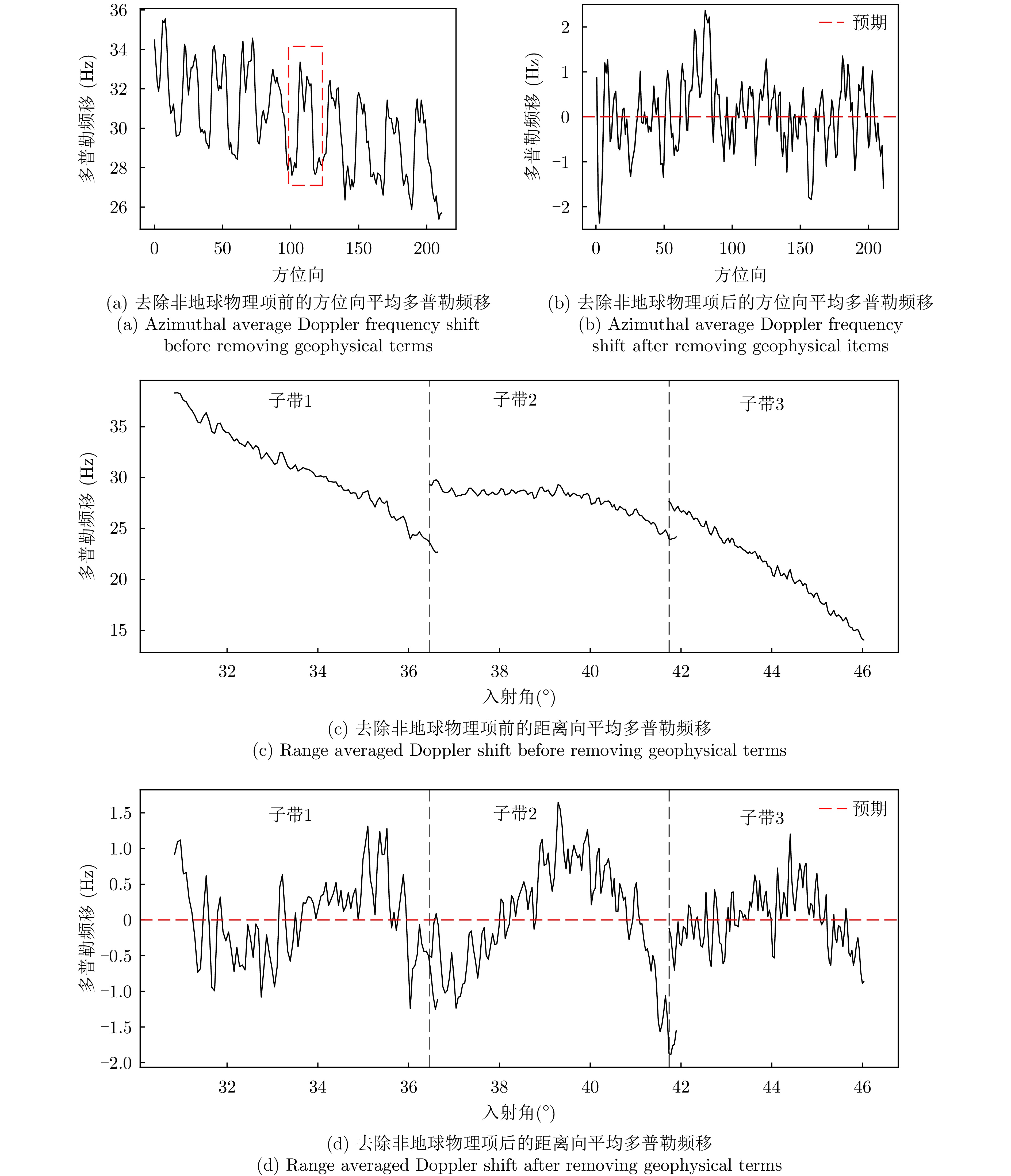
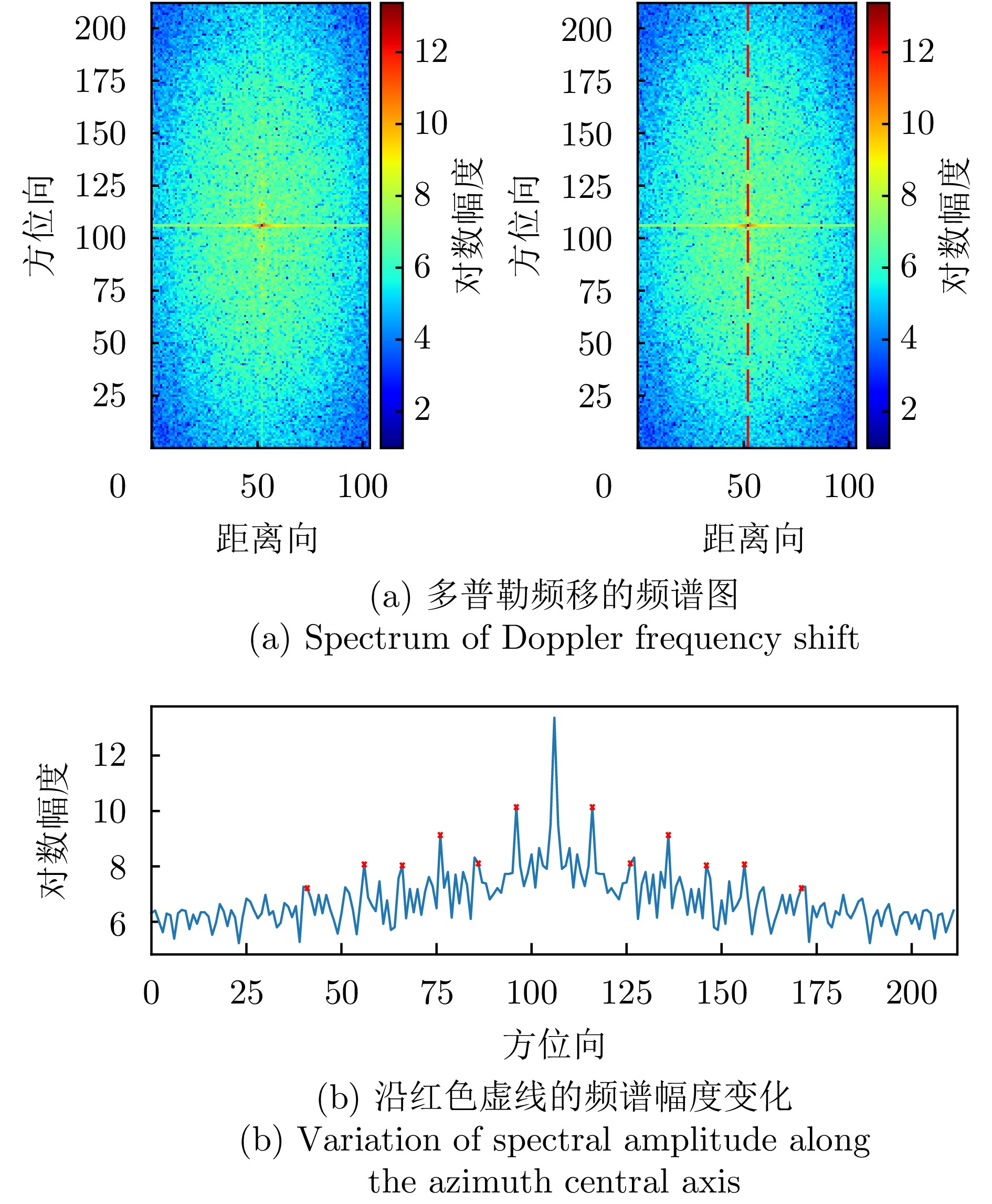
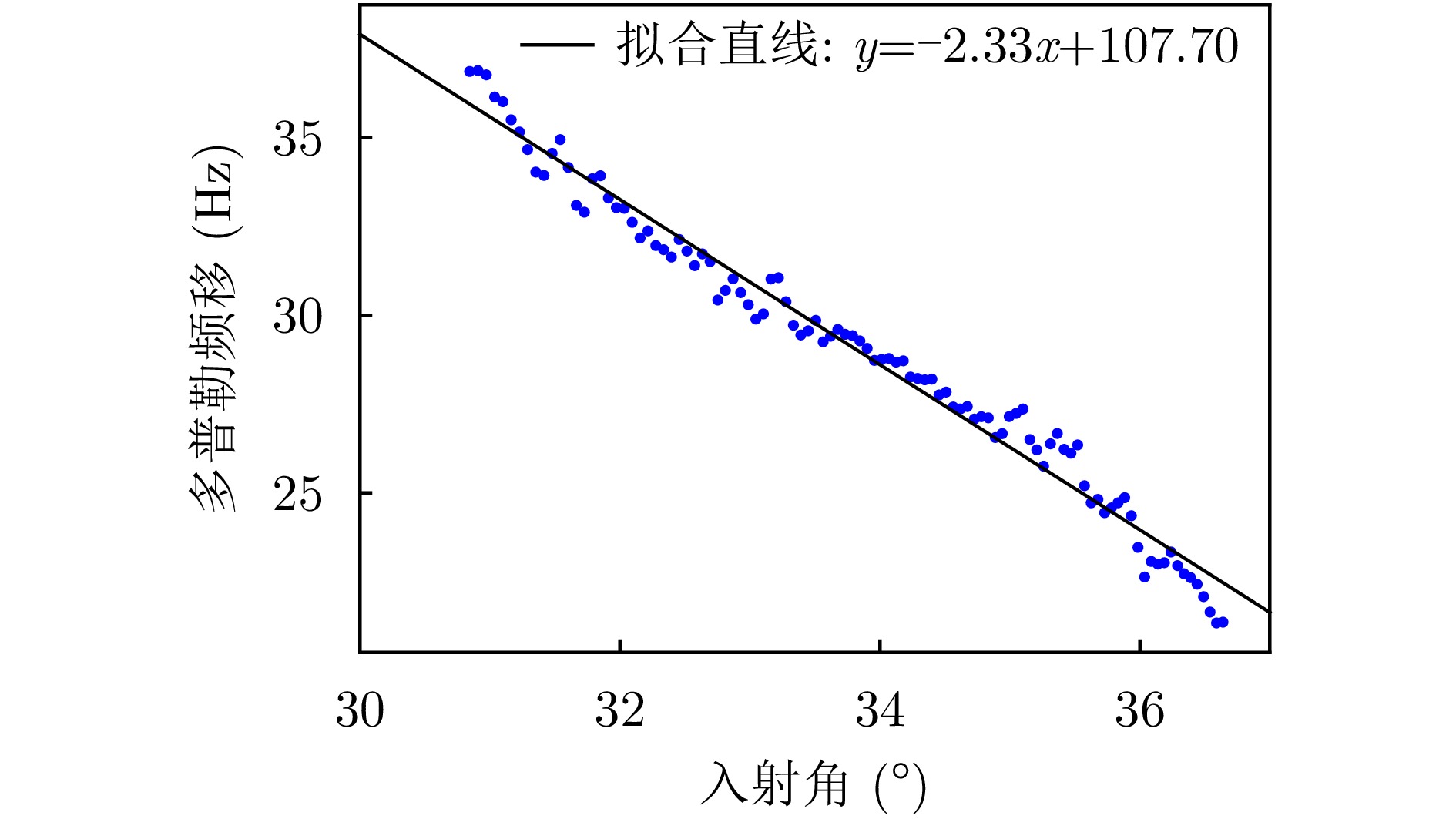
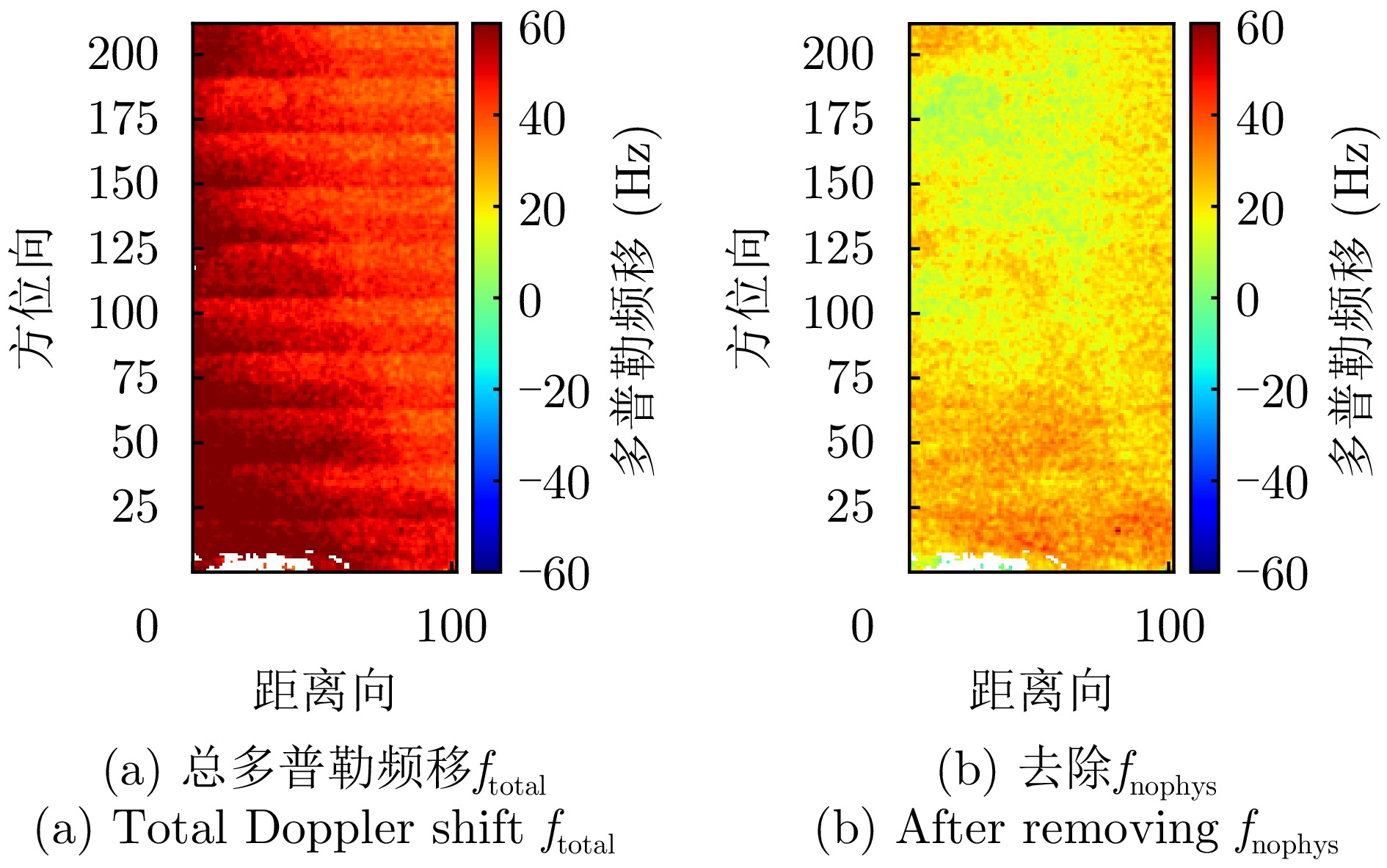
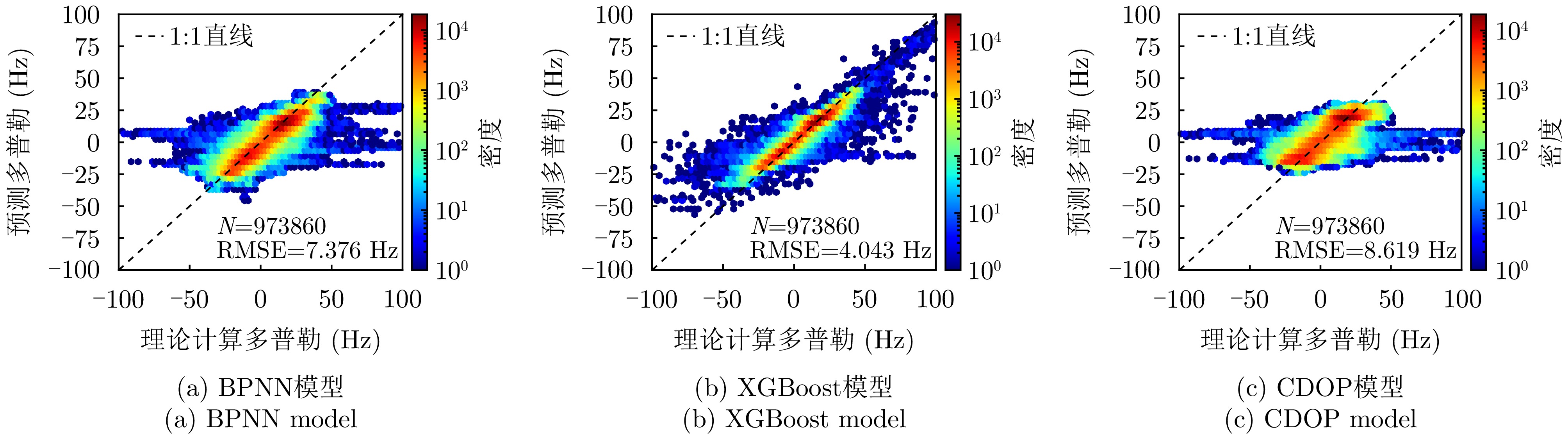
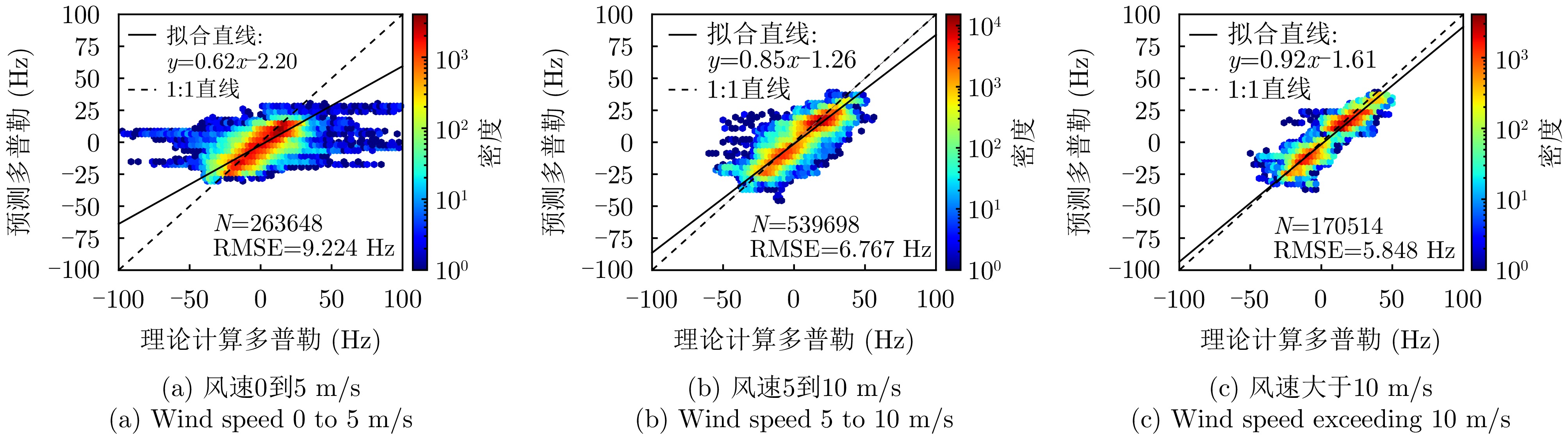
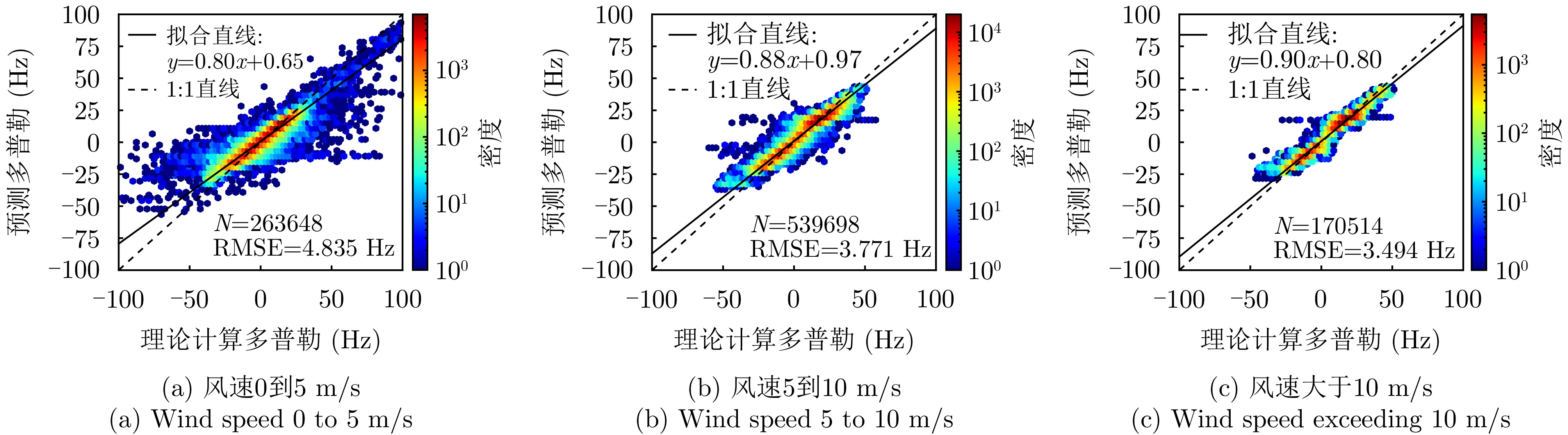
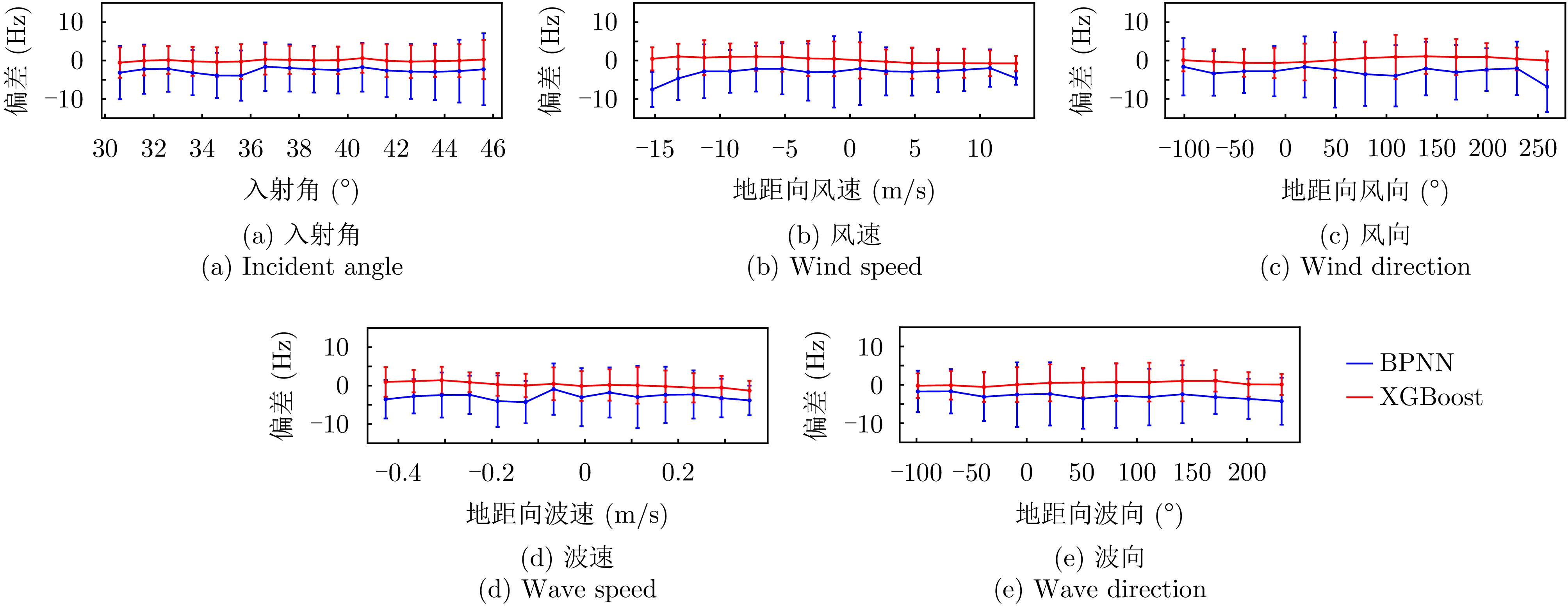
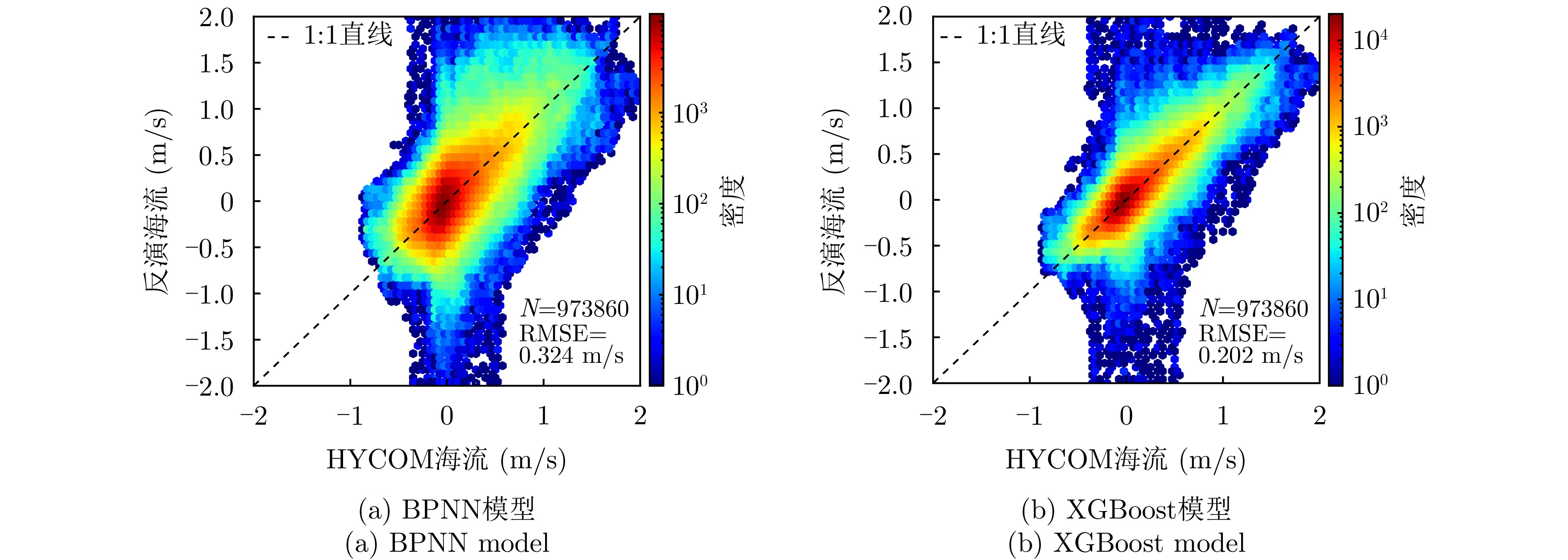
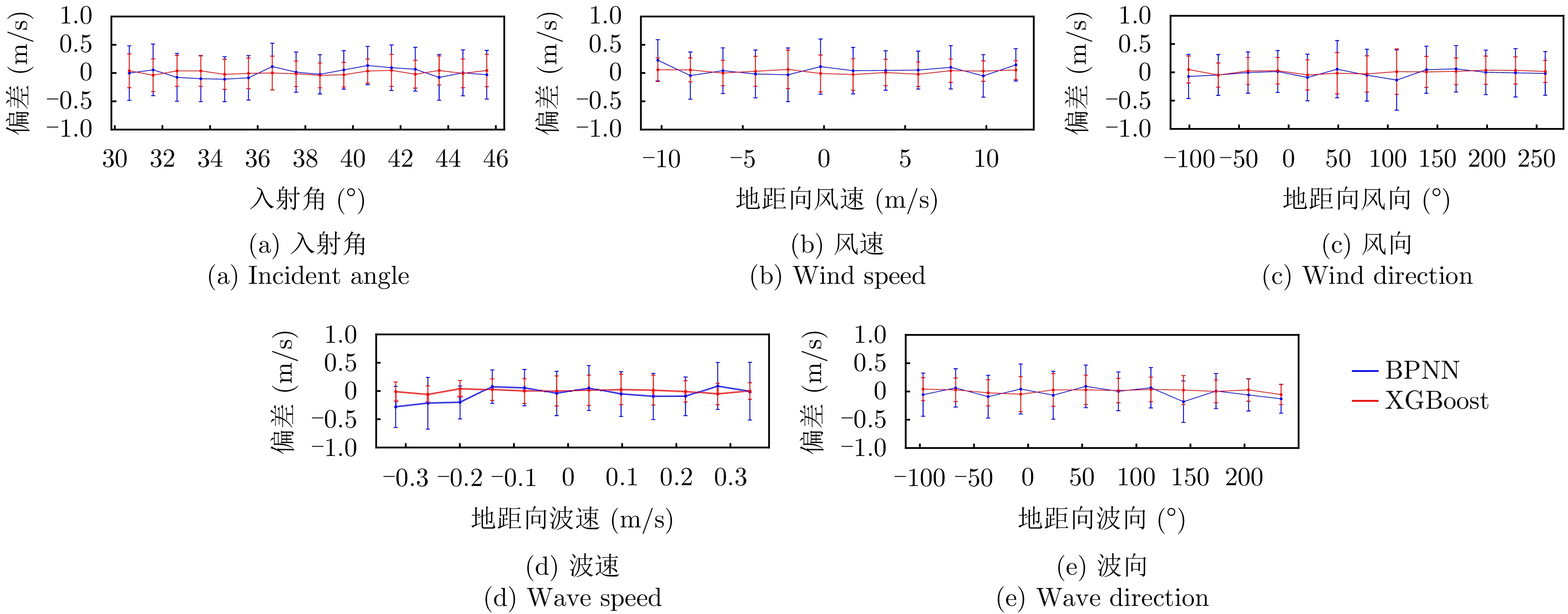
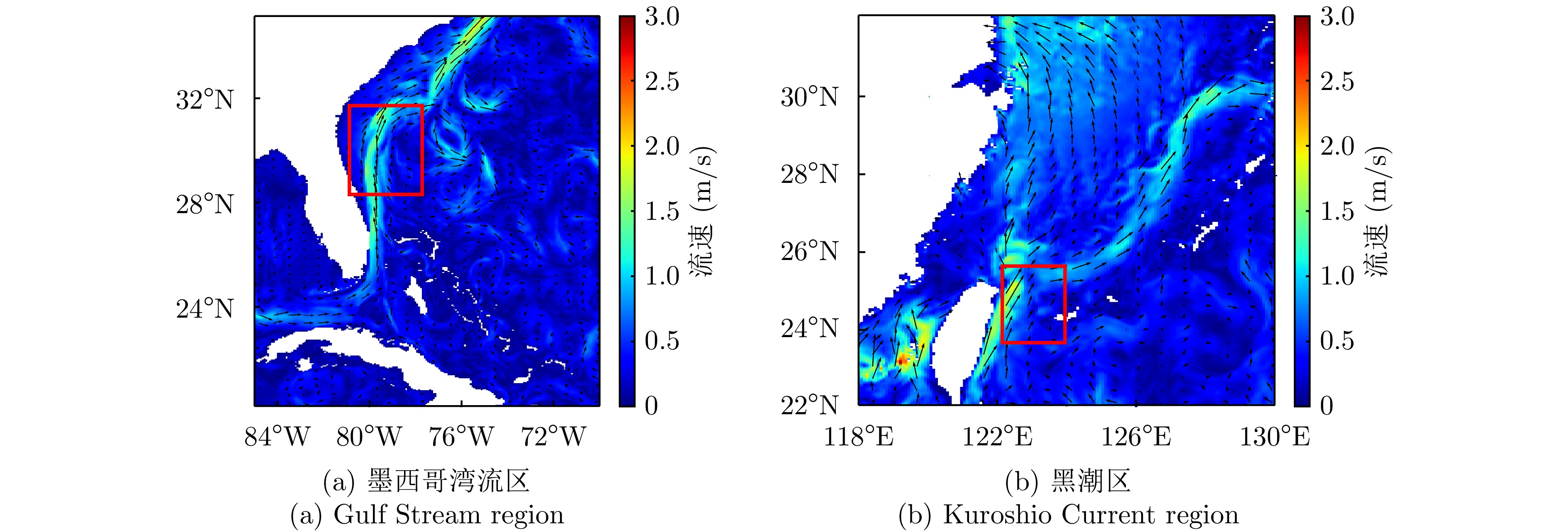
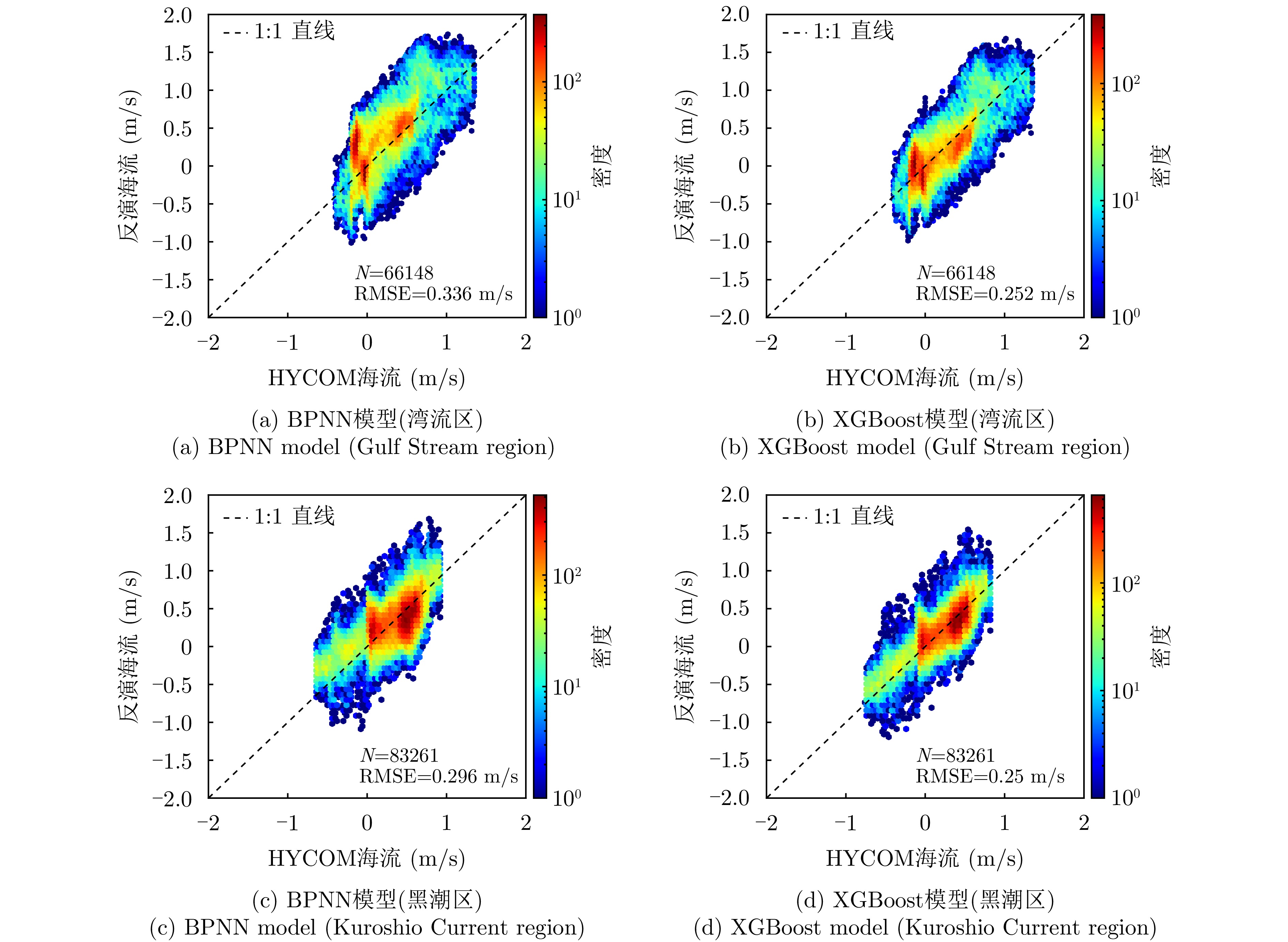
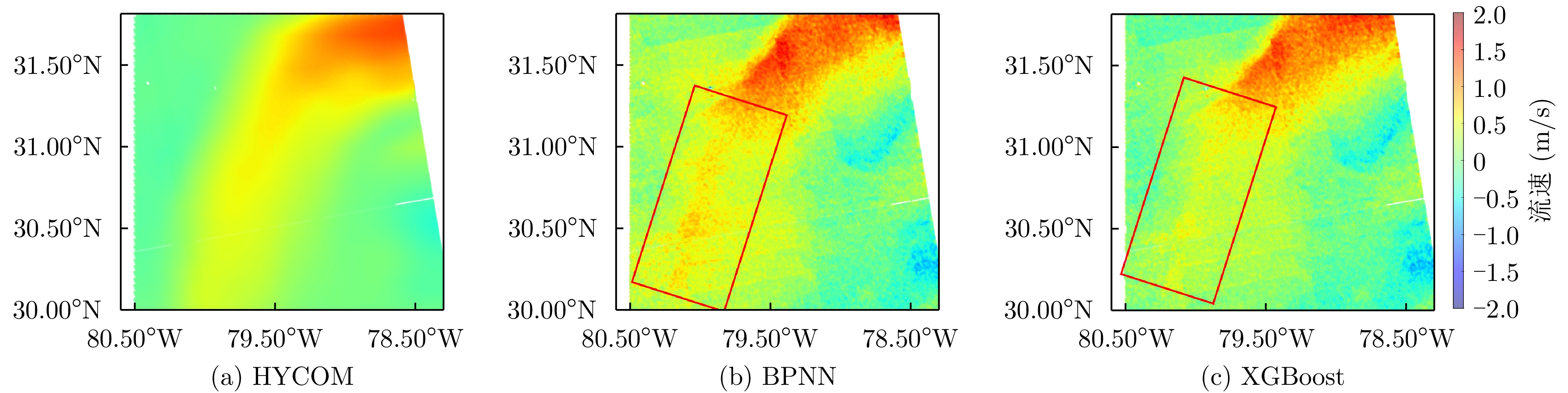
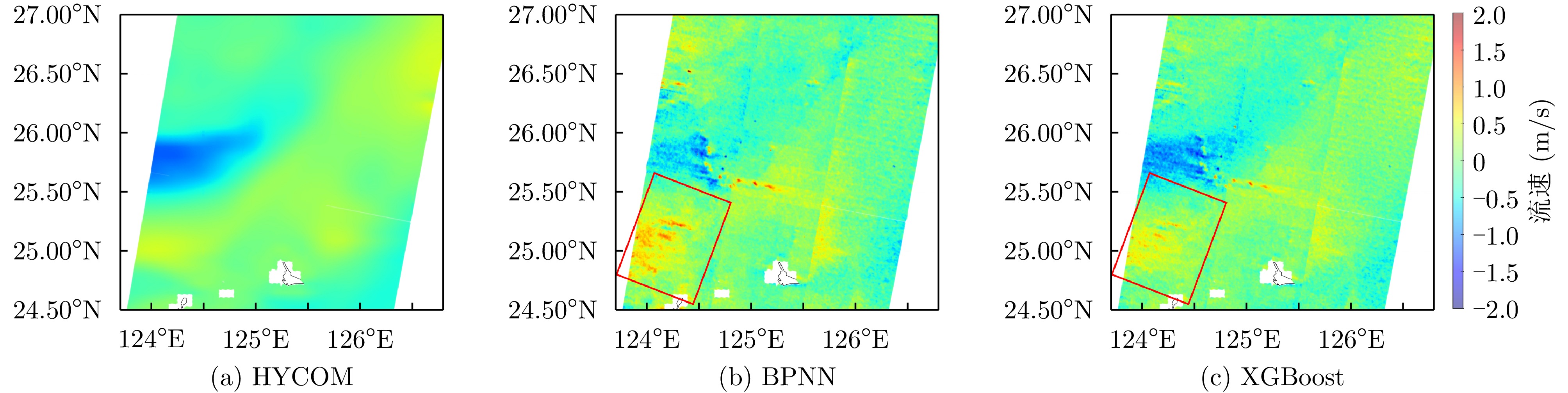
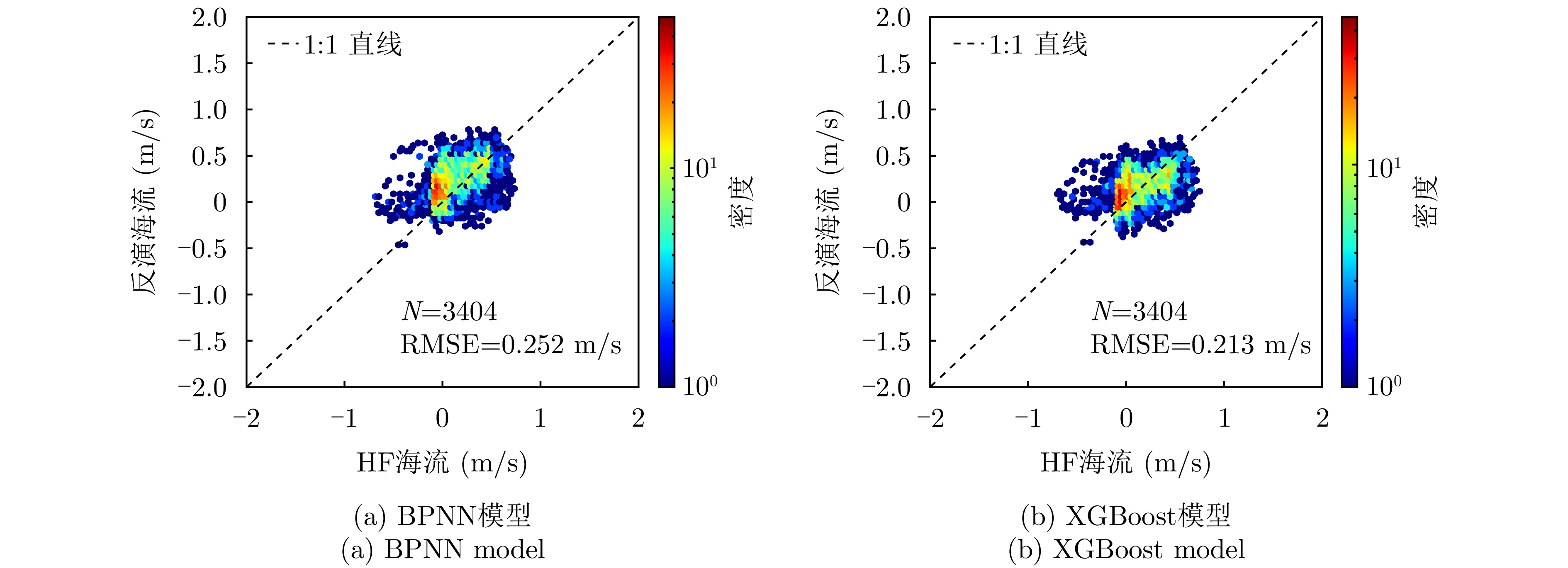
Ocean currents play a critical role in global climate regulation. Synthetic Aperture Radar (SAR) provides high-resolution observational support for ocean current detection by measuring Doppler shifts; however, SAR Doppler shifts contain multiple contributing components. To accurately retrieve ocean currents from these data, nongeophysical contributions must be precisely corrected, and wind- and wave-induced Doppler shifts must be accurately estimated. This paper proposes a machine learning-based method for modeling such shifts and retrieving ocean currents from Sentinel-1 SAR data. First, nongeophysical contributions in the SAR Doppler shift are precisely corrected to remove the effects unrelated to ocean motion. Second, BackproPagation Neural Network (BPNN) and eXtreme Gradient Boosting (XGBoost) models, optimized using the particle swarm optimization algorithm, are developed to describe the nonlinear relationship between the wind-wave Doppler shift and sea-surface wind-wave parameters derived from SAR data. Finally, the corrected Doppler shift is utilized to retrieve ocean surface current velocities. This paper comparatively evaluates the estimation accuracies of the wind-wave Doppler shifts obtained using the BPNN and XGBoost models, as well as the respective influence of each model's performance on the effectiveness of ocean current retrieval. Results indicate that the XGBoost model achieves superior estimation accuracy compared with the BPNN model. The Root Mean Square Error (RMSE) of the Doppler shift estimated by the XGBoost model is approximately 4.043 Hz, which is 2.898 Hz lower than that of the BPNN model. Compared with those of the HYCOM current data, the RMSE of the currents retrieved by the XGBoost model is about 0.202 m/s; this value is reduced by 0.122 m/s compared with that of the BPNN model. Validations against the current velocities detected by HF radar show that the RMSE of currents retrieved by the XGBoost model is 0.21 m/s, representing a 16% reduction compared with that of the BPNN model. These findings indicate that the proposed technical approach for ocean current retrieval using spaceborne SAR is highly accurate.
Ocean currents play a critical role in global climate regulation. Synthetic Aperture Radar (SAR) provides high-resolution observational support for ocean current detection by measuring Doppler shifts; however, SAR Doppler shifts contain multiple contributing components. To accurately retrieve ocean currents from these data, nongeophysical contributions must be precisely corrected, and wind- and wave-induced Doppler shifts must be accurately estimated. This paper proposes a machine learning-based method for modeling such shifts and retrieving ocean currents from Sentinel-1 SAR data. First, nongeophysical contributions in the SAR Doppler shift are precisely corrected to remove the effects unrelated to ocean motion. Second, BackproPagation Neural Network (BPNN) and eXtreme Gradient Boosting (XGBoost) models, optimized using the particle swarm optimization algorithm, are developed to describe the nonlinear relationship between the wind-wave Doppler shift and sea-surface wind-wave parameters derived from SAR data. Finally, the corrected Doppler shift is utilized to retrieve ocean surface current velocities. This paper comparatively evaluates the estimation accuracies of the wind-wave Doppler shifts obtained using the BPNN and XGBoost models, as well as the respective influence of each model's performance on the effectiveness of ocean current retrieval. Results indicate that the XGBoost model achieves superior estimation accuracy compared with the BPNN model. The Root Mean Square Error (RMSE) of the Doppler shift estimated by the XGBoost model is approximately 4.043 Hz, which is 2.898 Hz lower than that of the BPNN model. Compared with those of the HYCOM current data, the RMSE of the currents retrieved by the XGBoost model is about 0.202 m/s; this value is reduced by 0.122 m/s compared with that of the BPNN model. Validations against the current velocities detected by HF radar show that the RMSE of currents retrieved by the XGBoost model is 0.21 m/s, representing a 16% reduction compared with that of the BPNN model. These findings indicate that the proposed technical approach for ocean current retrieval using spaceborne SAR is highly accurate.

 微信 | 公众平台
微信 | 公众平台 

